High Angle of Attack Maneuvering and Stabilization Control of Aircraft
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Evaluation of Fighter Evasive Maneuvers Against Proportional Navigation Missiles
TURKISH NAVAL ACADEMY NAVAL SCIENCE AND ENGINEERING INSTITUTE DEPARTMENT OF COMPUTER ENGINEERING MASTER OF SCIENCE PROGRAM IN COMPUTER ENGINEERING EVALUATION OF FIGHTER EVASIVE MANEUVERS AGAINST PROPORTIONAL NAVIGATION MISSILES Master Thesis REMZ Đ AKDA Ğ Advisor: Assist.Prof. D.Turgay Altılar Đstanbul, 2005 Copyright by Naval Science and Engineering Institute, 2005 CERTIFICATE OF COMMITTEE APPROVAL EVALUATION OF FIGHTER EVASIVE MANEUVERS AGAINST PROPORTIONAL NAVIGATION MISSILES Submitted in partial fulfillment of the requirements for degree of MASTER OF SCIENCE IN COMPUTER ENGINEERING from the TURKISH NAVAL ACADEMY Author: Remzi Akda ğ Defense Date : 13 / 07 / 2005 Approved by : 13 / 07 / 2005 Assist.Prof. Deniz Turgay Altılar (Advisor) Prof. Ercan Öztemel (Defense Committee Member) Assoc.Prof. Coşkun Sönmez (Defense Committee Member) ABSTRACT (TURKISH) SAVA Ş UÇAKLARININ ORANTISAL SEY ĐR YAPAN GÜDÜMLÜ MERM ĐLERDEN SAKINMA MANEVRALARININ DE ĞERLEND ĐRĐLMES Đ Anahtar Kelimeler : Orantısal seyir, sakınma manevraları, aerodinamik kuvvetler Bu tezde, orantısal seyir adı verilen güdüm sistemiyle ilerleyen güdümlü mermilere kar şı uçaklar tarafından icra edilen sakınma manevralarının etkinli ği ölçülmü ş, farklı güdümlü mermilerden kaçı ş için en uygun manevralar tanımlanmı ştır. Uçu ş aerodinamikleri, matematiksel modele bir temel oluşturmak amacıyla sunulmu ştur. Bir hava sava şında güdümlü mermilerden sakınmak için uçaklar tarafından icra edilen belli ba şlı manevraların matematiksel modelleri çıkarılıp uygulanılmı ş, görsel simülasyonu gerçekle ştirilmi ş ve bu manevraların de ğişik ba şlangıç de ğerlerine göre ba şarım çözümlemeleri yapılmıştır. Güdümlü mermi-uçak kar şıla şma senaryolarında güdümlü merminin terminal güdüm aşaması ele alınmı ştır. Gerçekçi çözümleme sonuçları elde edebilmek amacıyla uçu ş aerodinamiklerinin göz önüne alınmasıyla elde edilen yönlendirme kinematiklerini içeren geni şletilmi ş nokta kütleli uçak modeli kullanılmı ştır. -

People's Liberation Army Air Force Aviation Training at the Operational
C O R P O R A T I O N From Theory to Practice People’s Liberation Army Air Force Aviation Training at the Operational Unit Lyle J. Morris, Eric Heginbotham For more information on this publication, visit www.rand.org/t/RR1415 Library of Congress Cataloging-in-Publication Data is available for this publication. ISBN: 978-0-8330-9497-1 Published by the RAND Corporation, Santa Monica, Calif. © Copyright 2016 RAND Corporation R® is a registered trademark. Limited Print and Electronic Distribution Rights This document and trademark(s) contained herein are protected by law. This representation of RAND intellectual property is provided for noncommercial use only. Unauthorized posting of this publication online is prohibited. Permission is given to duplicate this document for personal use only, as long as it is unaltered and complete. Permission is required from RAND to reproduce, or reuse in another form, any of its research documents for commercial use. For information on reprint and linking permissions, please visit www.rand.org/pubs/permissions. The RAND Corporation is a research organization that develops solutions to public policy challenges to help make communities throughout the world safer and more secure, healthier and more prosperous. RAND is nonprofit, nonpartisan, and committed to the public interest. RAND’s publications do not necessarily reflect the opinions of its research clients and sponsors. Support RAND Make a tax-deductible charitable contribution at www.rand.org/giving/contribute www.rand.org Preface About the China Aerospace Studies Institute The China Aerospace Studies Institute (CASI) was created in 2014 at the initiative of the Headquarters, U.S. -

Spin and Spin Recovery
90 Spin and Spin Recovery Dragan Cvetkovi´c1, Duško Radakovi´c2, Caslavˇ Mitrovi´c3 and Aleksandar Bengin3 1University Singidunum, Belgrade 2College of Professional Studies "Belgrade Politehnica", Belgrade 3Faculty of Mechanical Engineering, Belgrade University Serbia 1. Introduction Spin is a very complex movement of an aircraft. It is, in fact, a curvilinear unsteady flight regime, where the rotation of the aircraft is followed by simultaneous rotation of linear movements in the direction of all three axes, i.e. it is a movement with six degrees of freedom. As a result, there are no fully developed and accurate analytical methods for this type of problem. 2. Types of spin Unwanted complex movements of aircraft are shown in Fig.1. In the study of these regimes, one should pay attention to the conditions that lead to their occurrence. Attention should be made to the behavior of aircraft and to determination of the most optimal way of recovering the aircraft from these regimes. Depending on the position of the pilot during a spin, the Fig. 1. Unwanted rotations of aircraft spin can be divided into upright spin and inverted spin. During a upright spin, the pilot is in position head up, whilst in an inverted spin his position is head down. The upright spin is carried out at positive supercritical attack angles, and the inverted spin at negative supercritical attack angles. According to the slope angle of the aircraft longitudinal axis against the horizon, spin can be steep, oblique and flat spin (Fig.2). During a steep spin, www.intechopen.com 2210 MechanicalWill-be-set-by-IN-TECH Engineering the absolute value of the aircraft slope angle is greater than 50 degrees, i.e. -

U.S. National Aerobatic Championships
November 2012 2012 U.S. National Aerobatic Championships OFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB OFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB OFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB Vol. 41 No. 11 November 2012 A PUBLICATION OF THE INTERNATIONAL AEROBATIC CLUB CONTENTSOFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB At the 2012 U.S. National Aerobatic Championships, 95 competitors descended upon the North Texas Regional Airport in hopes of pursuing the title of national champion and for some, the distinguished honor of qualifying for the U.S. Unlimited Aerobatic Team. –Aaron McCartan FEATURES 4 2012 U.S. National Aerobatic Championships by Aaron McCartan 26 The Best of the Best by Norm DeWitt COLUMNS 03 / President’s Page DEPARTMENTS 02 / Letter From the Editor 28 / Tech Tips THE COVER 29 / News/Contest Calendar This photo was taken at the 30 / Tech Tips 2012 U.S. National Aerobatic Championships competition as 31 / FlyMart & Classifieds a pilot readies to dance in the sky. Photo by Laurie Zaleski. OFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB REGGIE PAULK COMMENTARY / EDITOR’S LOG OFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB PUBLISHER: Doug Sowder IAC MANAGER: Trish Deimer-Steineke EDITOR: Reggie Paulk OFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB VICE PRESIDENT OF PUBLICATIONS: J. Mac McClellan Leading by example SENIOR ART DIRECTOR: Olivia P. Trabbold A source for inspiration CONTRIBUTING AUTHORS: Jim Batterman Aaron McCartan Sam Burgess Reggie Paulk Norm DeWittOFFICIAL MAGAZINE of the INTERNATIONAL AEROBATIC CLUB WHILE AT NATIONALS THIS YEAR, the last thing on his mind would IAC CORRESPONDENCE I was privileged to visit with pilots at be helping a competitor in a lower International Aerobatic Club, P.O. -

Ff 89/6 Copy
$3 vol libre • free flight 6/89 Dec - Jan POTPOURRI SAC was informed by Sport Canada on the 10th of July that we are not eligible for funding for 1989-90 and until further notice. Thus we are now totally on our own. The average yearly grant from 1979 to 1988 in 1989 dollars was $14,000, or $16 per person. Perhaps it’s a good thing as planning in an atmosphere of doubt is not conducive to good health and efficient use of funds. The cutback was not unexpected and steps were taken early on to ease the effects of this loss of revenue. Imaginative planning in our small store and a good response from our members through the use of the “Soaring Stuff” inserts resulted in in- creased sales. We will also receive higher than projected invest- ment income essentially due to careful cash management and short-term interest rates, which have remained higher for longer than generally expected. In addition, a small gain in projected receipts from an unexpected increase in membership – now at 1423 – which is the first time since 1982 that we have passed 1400. Total expenditures should come in well below budget projection, primarily as a result of scaling back meetings and travel expenditures. On balance it seems fair to say that a combination of some tight fistedness on the expenditure side and a bit of luck on the revenue side will leave SAC in a financially stronger position than was expected at the beginning of the season, despite the cutting off of govern- ment funding. -

Soaring Magazine Index for 1990 to 1999/1990To1999 Organized by Subject
Soaring Magazine Index for 1990 to 1999/1990to1999 organized by subject The contents have all been re-entered by hand, so thereare going to be typos and confusion between author and subject, etc... Please send along any corrections and suggestions for improvement. 1-26 Bob Dittert, 1-26s + Rain = Championship,December,1999, page 24 1-26 Association Bob Hurni, 1991 1-26 Championships (Caesar Creek),January,1992, pages 18-24 George Powell, The Stealth Glider,January,1992, pages 28-30 MikeGrogan, Hallelujah! I Am Flying Again,January,1992, pages 35-39 Harry Senn, Why 1-26’sDon’tFly Sports Class,February,1992, pages 39-41 Luan & John Walker, 1992 1-26 Championships (Midlothian, TX),January,1993, pages 40-44 Joe Walter, What a Contest (the 1-26 Championships),October,1993, page 3 Jim Hard, (1993) 1-26 Championships at Albert Lea, Minnesota,November,1993, pages 19-25 TomHolloran, GPS: The First Year-Almost,November,1993, pages 26, 28-30 1000 Kilometer Flights Robert Penn, Sixteen Contestants Fly 1000 KilometersinPossible World RecordContest Task,No- vember,1990, page 15 YanWhytlaw, The 1000 KM Club,March, 1992, pages 20-23 KenKochanski, The Joy of Soaring (1000KM from Blairstown by Bob Templin and Ken Kochanski)!, September,1992, page 6 Sterling V.Starr, 1000KM in the Sky! (Over the Sierraand White Mountains),March, 1993, pages 42-45 Advertising Mark Kennedy, Soaring in Action: Please Note! (No) July Classified Ads,June, 1997, page 14 Convenience and Savings (with Soaring Classifieds),October,1997, page 4 Aerobatics Wade Nelson, An Aerobatic Ride at Estrella,January,1990, page 3 Trish Durbin, Cat Among the Pigeons,February,1990, page 20 Bob Kupps, The ThirdWorld Glider Aerobatic Championships (Hockenheim),March, 1990, page 15 Trish Durbin, Author’sResponse (to "Cat Among the Pigeons" Complaints),July,1990, page 2 Thomas J. -

Flying with an ACE
Center Spread: WACO MYSTERY SHIP WORLD $4.95A U.S./$6.95IRSHOW CAN. NEWSMarch/April 2008 Flying with an ACE • Who’s da (Air) Boss? • Wingwalking: Never! • The Starfighters Jet Team3 • 2008 Al Ain Aerobatic Show ... and Lots More! www.airshowmag.com World Airshow News 1 FLYING WITH AN ACE Greg Koontz & Sky Country Lodge By Jeff Parnau I’ve flown with Greg Koontz a number of times. He took me up in the Pitts Model 12 a few years ago – a beast of an airplane with a ra- dial engine that turns “the wrong way.” I give him a ride in my Cirrus. And I was in his Piper Cub for a landing on a moving pickup truck. In late 2007, I decided it was time to get a bit more serious about aerobatic flight. And about that time, Greg (an Aerobatic Competency Evaluator, or ACE) became the 14th person certified by the National Association of Flight Instructors as Master CFI-Aerobatic. We ar- ranged a date, and headed to Ashville, Alabama on November 13. A little over three years ago, Greg and spouse Cora began con- struction of Sky Country Lodge – a bed-and-breakfast flight school located on an isolated grass strip near Birmingham. The lodge is a beautiful open-concept design, with two private bedrooms with baths for Greg’s typical workload of two students at a time. The hangar houses Greg’s 1946 Piper Cub (used in his comedy act) and nearly-new Super Decathlon, in which he teaches. My early aero- batic experience was in the same make and model. -

Update on the F–35 Joint Strike Fighter Program
i [H.A.S.C. No. 114–58] UPDATE ON THE F–35 JOINT STRIKE FIGHTER PROGRAM HEARING BEFORE THE SUBCOMMITTEE ON TACTICAL AIR AND LAND FORCES OF THE COMMITTEE ON ARMED SERVICES HOUSE OF REPRESENTATIVES ONE HUNDRED FOURTEENTH CONGRESS FIRST SESSION HEARING HELD OCTOBER 21, 2015 U.S. GOVERNMENT PUBLISHING OFFICE 97–492 WASHINGTON : 2016 For sale by the Superintendent of Documents, U.S. Government Publishing Office Internet: bookstore.gpo.gov Phone: toll free (866) 512–1800; DC area (202) 512–1800 Fax: (202) 512–2104 Mail: Stop IDCC, Washington, DC 20402–0001 SUBCOMMITTEE ON TACTICAL AIR AND LAND FORCES MICHAEL R. TURNER, Ohio, Chairman FRANK A. LOBIONDO, New Jersey LORETTA SANCHEZ, California JOHN FLEMING, Louisiana NIKI TSONGAS, Massachusetts CHRISTOPHER P. GIBSON, New York HENRY C. ‘‘HANK’’ JOHNSON, JR., Georgia PAUL COOK, California TAMMY DUCKWORTH, Illinois BRAD R. WENSTRUP, Ohio MARC A. VEASEY, Texas JACKIE WALORSKI, Indiana TIMOTHY J. WALZ, Minnesota SAM GRAVES, Missouri DONALD NORCROSS, New Jersey MARTHA MCSALLY, Arizona RUBEN GALLEGO, Arizona STEPHEN KNIGHT, California MARK TAKAI, Hawaii THOMAS MACARTHUR, New Jersey GWEN GRAHAM, Florida WALTER B. JONES, North Carolina SETH MOULTON, Massachusetts JOE WILSON, South Carolina JOHN SULLIVAN, Professional Staff Member DOUG BUSH, Professional Staff Member NEVE SCHADLER, Clerk (II) C O N T E N T S Page STATEMENTS PRESENTED BY MEMBERS OF CONGRESS Turner, Hon. Michael R., a Representative from Ohio, Chairman, Subcommit- tee on Tactical Air and Land Forces .................................................................. 1 WITNESSES Bogdan, Lt Gen Christopher C., USAF, Program Executive Officer, F–35 Joint Program Office, U.S. Department of Defense .......................................... 2 Harrigian, Maj Gen Jeffrey L., USAF, Director, F–35 Integration Office, U.S. -

Autonomous Aerobatics: a Linear Algorithm and Implementation for a Slow Roll Student: Michael Brett Pearce1 Professors: Dr
Autonomous Aerobatics: A Linear Algorithm and Implementation for a Slow Roll Student: Michael Brett Pearce1 Professors: Dr. Larry Silverberg2, Dr. Ashok Golpalarathnam3, Dr. Gregory Buckner4 Technical Expert on Aerobatics: John White, Master Aerobatic Instructor 2061858 CFI5 [email protected] [email protected] [email protected] [email protected] [email protected] Introduction Control Algorithm Methodology Custom Designed Airframe Unmanned Combat Aerial Vehicles ( ’s) are becoming common on the battlefield airspace but to date UCAV 1.21:1 Thrust to Twin Rudders for Yaw A pilot is essentially a PID Controller. The author’s unique aviation Control they have not been implemented in fighters due to the complexity of executing maneuvers required and VF-1 Valkyrie Weight Ratio the nonlinearities in aerodynamics, control response, control inputs required, and extreme attitudes. experience as a Certificated Flight Instructor and competition aerobatic pilot Custom Designed for project requirements Flapperons for Split Elevons for Thrust in powered and sailplanes is applied and converted to a mathematical basis. Hyper maneuverable aerobatic airframe with Slow Speed Flight Vectoring Such maneuvers are crucial for , low level penetration Air Combat Maneuvering (ACM, “dogfighting”) full 3-axis thrust vectoring with extreme maneuvering for bombing targets, escape and evasion from missiles, and "jinking" for This reduces the control problem to a linear system, bypassing the analytical, Capable of unlimited aerobatics and post stall avoiding ground to air gunfire. Such flying is collectively known as Basic Fighter Maneuvers (BFM). maneuvering computational, and monetary issues with a typical engineering approach. Onboard autopilot in a custom chassis BFM is fundamentally composed of aerobatics, and aerobatics itself is fundamentally composed of a few Foam core composite airframe stressed for in basic maneuvers. -

Semiempirical Simulation of Contemporary Fighter Planes
| Mathematics | UDC 629.735.33.015.075 Zhelonkin M. V. Semiempirical simulation of contemporary fighter planes engaging in dogfight in order to estimate the possibility of using supermanoeuvrability modes The paper presents investigation results concerning employing supermanoeuvrability modes in dogfight. We selected one of the standard manoeuvres and demonstrated the efficiency of using it. Keywords: features, supermanoeuvrability, dogfight, semi-empirical simulation, tactical employment, Split S manoeuvre. Introduction of attack, which lead to intense deceleration of Fighter aviation is mostly used for dogfighting the aircraft and to a decrease in energy height, and one of the main tasks of preparation for en- therefore a Split S manoeuvre will compensate gaging enemy air targets is the training of flight such a decrease to some extent. personnel in operating fighter aircraft weapons in Thus, in order to evaluate the efficiency of order to achieve the best performance to destroy supermanoeuvrability modes, we have selected enemy aircraft during dogfighting in various a Split S manoeuvre. Fig. 1 shows the aircraft weather and operational conditions when acting flight path when making the manoeuvre. solo or as part of an aircraft group. Modern 4++ The most important parameter that defines and 5th generation fighters are able to fly in a su- tolerable conditions for making a Split S man- permanoeuvrability mode, i.e. at angles of attack oeuvre is minimum altitude loss during the ma- beyond stall while maintaining balanced control. noeuvre, which depends on the entry speed and That is why flight personnel need to be properly altitude, as well as on the current g-load and air- trained in order to use all the aircraft capabilities. -

CAA Doc 743 Civil Air Displays a Guide for Pilots
Safety Regulation Group Civil Air Displays a guide for pilots contents introduction Introduction Air displays are now one of the most popular The law spectator events in the United Kingdom. On average there are over 250 civil flying displays Guidance for display each year attracting in excess of two million pilots spectators. It is of the utmost importance in the interests of public and personal safety, that those Managing the risk who participate in such displays operate to the highest standards. These notes are intended to Planning your provide advice to display pilots to help them display avoid the pitfalls which have been experienced in the past. Practising for your display The air show Display day Post display © Andrew Critchell 1 the law The rules governing the conduct of civil air displays in the United Kingdom are given in the current Air Navigation Order, The Rules of the Air Regulations and comprehensively explained in CAP 403 – “Flying Displays and Special Events: A Guide to Safety and Administrative Arrangements”. guidance for display pilots Display flying, especially aerobatics, is a specialised form of flying that frequently involves flying the aircraft close to the edges of the permitted flight envelope. Regrettably, most years, a small number of pilots are killed whilst displaying. Many of these pilots were highly experienced and extremely competent in their particular aircraft and display. What can be done to minimise the risk? managing the risk personnel fitness There are a large number of factors which affect the outcome of a particular flight. Many of them are encountered well before the pilot gets anywhere near the aircraft. -
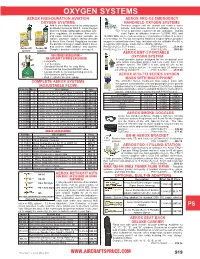
Oxygen Systems
OXYGEN SYSTEMS AEROX HIGH-DURATION AVIATION AEROX PRO-O2 EMERGENCY OXYGEN SYSTEMS HANDHELD OXYGEN SYSTEMS Add to your flying comfort by using oxygen Provides oxygen until the aircraft can reach a lower at altitudes as low as 5000 ft. Aerox Oxygen altitude. And because Pro-O2 is refillable, there is no CM Systems include lightweight aluminum cyl in- need to purchase replacement O2 cartridges. During ders, regulators, all hardware, flow meter, short flights at altitudes between 12,500ft. MSL and and nasal cannulas (masks available as 14,000ft. MSL where maneuvering over mountains or turbulent weather option). Oxysaver oxygen saving cannulas is necessary, the Pro-O2 emergency handheld oxygen system provides & Aerox Flow Control Regulators increase oxygen to extend these brief legs. Included with the refillable Pro-O2 is WP the duration of oxygen supply about 4 times, a regulator with gauge, mask and a refillable cylinder. and prevent nasal irritation and dryness. Pro-O2-2 (2 Cu. Ft./1 mask)........................P/N 13-02735 .........$328.00 Aerox 2D Aerox 4M Complete brochure available on request. Pro-O2-4 (2 Cu. Ft./2 masks) ......................P/N 13-02736 .........$360.00 system system AEROX EMT-3 PORTABLE 500 SERIES REGULATOR – AN AIRCRAFT SPRUCE EXCLUSIVE! OXYGEN SYSTEM ME A small portable system designed for the occasional user • Low profile who wants something smaller and less costly than a full • 1, 2, & 4 place portable system. The EMT-3 is also ideal for use as an • Standard Aircraft filler for easy filling emergency oxygen system. The system lasts 25 minutes at • Convenient top mounted ON/OFF valve 2.5 LPM @ 25,000 FT.