Integration of Level Crossing in ETCS
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

ERTMS/ETCS Railway Signalling
Appendix A ERTMS/ETCS Railway Signalling Salvatore Sabina, Fabio Poli and Nazelie Kassabian A.1 Interoperable Constituents The basic interoperability constituents in the Control-Command and Signalling Sub- systems are, respectively, defined in TableA.1 for the Control-Command and Sig- nalling On-board Subsystem [1] and TableA.2 for the Control-Command and Sig- nalling Trackside Subsystem [1]. The functions of basic interoperability constituents may be combined to form a group. This group is then defined by those functions and by its remaining exter- nal interfaces. If a group is formed in this way, it shall be considered as an inter- operability constituent. TableA.3 lists the groups of interoperability constituents of the Control-Command and Signalling On-board Subsystem [1]. TableA.4 lists the groups of interoperability constituents of the Control-Command and Signalling Trackside Subsystem [1]. S. Sabina (B) Ansaldo STS S.p.A, Via Paolo Mantovani 3-5, 16151 Genova, Italy e-mail: [email protected] F. Poli Ansaldo STS S.p.A, Via Ferrante Imparato 184, 80147 Napoli, Italy e-mail: [email protected] N. Kassabian Ansaldo STS S.p.A, Via Volvera 50, 10045 Piossasco Torino, Italy e-mail: [email protected] © Springer International Publishing AG, part of Springer Nature 2018 233 L. Lo Presti and S. Sabina (eds.), GNSS for Rail Transportation,PoliTO Springer Series, https://doi.org/10.1007/978-3-319-79084-8 234 Appendix A: ERTMS/ETCS Railway Signalling Table A.1 Basic interoperability constituents in the Control-Command -

EULYNX the Next Generation Signalling Strategy for Europe
European Initiative Linking Interlocking Subsystems EULYNX The next generation signalling strategy for Europe Signalling Seminar IRSE ITC – JR East Frans Heijnen 7 April 2016 With thanks to Maarten van der Werff What would you do? European Initiative Linking Interlocking Subsystems Situation: • You are an infra manager (…. passenger, tax payer) • Expectations concerning signalling • Huge installed base • Many generations of equipment • Obsolete within 10..20 years • Not enough budget to replace And you know: “At all European railways these problems are similar …” EULYNX 2 What is the problem? European Initiative Linking Interlocking Subsystems • Each railway project adds new assets to become obsolete again • They get overage sooner than expected • Costs depend on whoever was chosen in the past as the supplier of the system • There are potential savings but the railway is stuck with current solutions • But you don’t have a strategy for a new solution EULYNX 3 EULYNX. What is EULYNX? European Initiative Linking Interlocking Subsystems EULYNX is the strategic approach for standardisation of signalling systems Because standardisation is a key factor to reduce: • A ‘technology zoo’ with many different systems, • The number of multiple incompatible interfaces • The cost involved in replacing and renewal EULYNX 4 The vision that becomes reality European Initiative Linking Interlocking Subsystems By systems engineering and the development process • Use a common architecture • With a common apportionment of functionalities • Define standardised -

CBTC Test Simulation Bench
Computers in Railways XII 485 CBTC test simulation bench J. M. Mera, I. Gómez-Rey & E. Rodrigo CITEF (Railway Technology Research Centre), Escuela Técnica Superior de Ingenieros Industriales, Universidad Politécnica de Madrid, Spain Abstract Due to its safety characteristics, signalling equipment requires a great amount of testing and validation during the different stages of its life cycle, and particularly during the installation and commissioning of a new line or upgrade of an existing line, the latter being even more complicated due to the short engineering periods available overnight. This project aims to develop a tool to reduce the above-mentioned efforts by simulating the CBTC trackside, fulfilling the interfaces between subsystems and elements of these subsystems, and using some real elements. In this way, a testing environment for signalling equipment and data has been developed for the CBTC system. The aims of the project that were set out at the beginning of the development and completed with the present simulator are as follows: Real CBTC equipment trials and integration: CBTC on-board equipment, CBTC Radio Centre, etc. Other signalling elements trials and integration: interlockings and SCCs. CBTC track data validation. In order to achieve these objectives, various simulation applications have been developed, of which the most important are the following: Infrastructure, Automatic trains, Train systems, Planning and Control Desk, etc. This system has been developed, and is currently adding new modules and functionalities, for companies of the Invensys Group: Westinghouse Rail WIT Transactions on The Built Environment, Vol 114, © 2010 WIT Press www.witpress.com, ISSN 1743-3509 (on-line) doi:10.2495/CR100451 486 Computers in Railways XII Systems in the UK and Dimetronic Signals in Spain, which are using it for the new CBTC lines under their responsibility. -
Report on Railway Accident with Freight Car Set That Rolled Uncontrolledly from Alnabru to Sydhavna on 24 March 2010
Issued March 2011 REPORT JB 2011/03 REPORT ON RAILWAY ACCIDENT WITH FREIGHT CAR SET THAT ROLLED UNCONTROLLEDLY FROM ALNABRU TO SYDHAVNA ON 24 MARCH 2010 Accident Investigation Board Norway • P.O. Box 213, N-2001 Lillestrøm, Norway • Phone: + 47 63 89 63 00 • Fax: + 47 63 89 63 01 www.aibn.no • [email protected] This report has been translated into English and published by the AIBN to facilitate access by international readers. As accurate as the translation might be, the original Norwegian text takes precedence as the report of reference. The Accident Investigation Board has compiled this report for the sole purpose of improving railway safety. The object of any investigation is to identify faults or discrepancies which may endanger railway safety, whether or not these are causal factors in the accident, and to make safety recommendations. It is not the Board’s task to apportion blame or liability. Use of this report for any other purpose than for railway safety should be avoided. Photos: AIBN and Ruter As Accident Investigation Board Norway Page 2 TABLE OF CONTENTS NOTIFICATION OF THE ACCIDENT ............................................................................................. 4 SUMMARY ......................................................................................................................................... 4 1. INFORMATION ABOUT THE ACCIDENT ..................................................................... 6 1.1 Chain of events ................................................................................................................... -

PROVÁDĚCÍ NAŘÍZENÍ KOMISE (EU) 2019/773 Ze Dne 16
27.5.2019 CS Úřední věstník Evropské unie L 139 I/5 PROVÁDĚCÍ NAŘÍZENÍ KOMISE (EU) 2019/773 ze dne 16. května 2019 o technické specifikaci pro interoperabilitu týkající se subsystému „provoz a řízení dopravy“ železničního systému v Evropské unii a o zrušení rozhodnutí 2012/757/EU (Text s významem pro EHP) EVROPSKÁ KOMISE, s ohledem na Smlouvu o fungování Evropské unie, s ohledem na směrnici Evropského parlamentu a Rady (EU) 2016/797 ze dne 11. května 2016 o interoperabilitě železničního systému v Evropské unii (1) a zejména na čl. 5 odst. 11 uvedené směrnice, vzhledem k těmto důvodům: (1) Článek 11 rozhodnutí Komise v přenesené pravomoci (EU) 2017/1474 (2) vymezuje konkrétní cíle pro vypracování, přijetí a přezkum technických specifikací pro interoperabilitu (TSI) železničního systému v Unii. (2) Podle čl. 3 odst. 5 písm. b) a f) rozhodnutí (EU) 2017/1474 by TSI měly být přezkoumány s cílem zohlednit vývoj železničního systému Unie a souvisejících činností v oblasti výzkumu a inovací a aktualizovat odkazy na normy. (3) Podle čl. 3 odst. 5 písm. c) rozhodnutí (EU) 2017/1474 by TSI měly být přezkoumány s cílem uzavřít zbývající otevřené body. Je třeba zejména vymezit rozsah otevřených bodů týkajících se provozu a rozlišit mezi příslušnými vnitrostátními předpisy a pravidly vyžadujícími harmonizaci prostřednictvím práva Unie s cílem umožnit přechod na interoperabilní systém a vymezit optimální úroveň technické harmonizace. (4) Dne 22. září 2017 Komise v souladu s čl. 19 odst. 1 nařízení Evropského parlamentu a Rady (EU) 2016/796 (3) požádala Agenturu Evropské unie pro železnice (dále jen „agentura“), aby připravila doporučení pro provedení výběru konkrétních cílů stanovených v rozhodnutí (EU) 2017/1474. -
Allegato 2 Piano ERTMS Evidenza Modifiche.Pdf
Allegato 2 Piano Accelerato ERTMS revisione O con evidenza delle modifiche rispetto alla revisione N e-POD banca dati documentale RFI - download effettuato il 04/09/2020 19:18:20 stato di vigenza: IN VIGORE livello riservatezza Uso pubblico Piazza della Croce Rossa, 1 - 00161 Roma Rete Ferroviaria Italiana – Società per Azioni - Gruppo Ferrovie dello Stato Italiane Società con socio unico soggetta all’attività di direzione e coordinamento di Ferrovie dello Stato Italiane S.p.A. a norma dell’art. 2497 sexies del cod. civ. e del D.Lgs. n. 112/2015 Sede legale: Piazza della Croce Rossa, 1 - 00161 Roma Cap. Soc. euro 31.528.425.067,00 Iscritta al Registro delle Imprese di Roma ––– Cod. Fisc. 01585570581 e P. Iva 01008081000 – R.E.A. 758300 Codifica: PIANO DI SVILUPPO ERTMS/ETCS FOGLIO e GSM-R RFI TC.SCC SR RR AP 01 R05 O 1 di 130 PIANO DI SVILUPPO DI ERTMS (ETCS E GSM-R) SULLA RETE RFI Rev. Data Descrizione Verifica Tecnica Autorizzazione S. Buonincontri Aggiornamenti e stato di D. Caronti avanzamento attività in M. Ciaffi realizzazione rispetto al National Implementation S. Geraci O 23/07/2020 Plan e rimodulazione della G. Gallo F. Senesi e-POD banca dati documentale RFI - download effettuato il 04/09/2020 19:18:20 stato di vigenza: IN VIGORE livello riservatezza Uso pubblico proposta RFI del piano C. Iommazzo “accelerato” di rinnovamento tecnologico guidato da S. Marcoccio ERTMS G. Ridolfi D. Schiavoni PIANO DI SVILUPPO ERTMS/ETCS Codifica: FOGLIO 2 di 130 e GSM-R RFI TC.SCC RR AP 01 R05 O ELABORAZIONE DOCUMENTO VERIFICA EFFETTUATA Marco -
Geographic Signaling System (Geo)
FIELD REFERENCE MANUAL GEOGRAPHIC SIGNALING SYSTEM (GEO) JULY 2008 (REVISED SEPTEMBER 2018) DOCUMENT NO. SIG-00-05-09 VERSION D Siemens Mobility 700 East Waterfront Drive Munhall, Pennsylvania 15120 1-800-793-SAFE Copyright © 2008-2018 Siemens Mobility, Inc. All rights reserved PRINTED IN THE U.S.A. PROPRIETARY INFORMATION The material contained herein constitutes proprietary and confidential information, and is the intellectual property of Siemens Mobility, Inc., Rail Automation (Siemens) protected under United States patent, copyright and/or other laws and international treaty provisions. This information and the software it describes are for authorized use only, and may not be: (i) modified, translated, reverse engineered, decompiled, disassembled or used to create derivative works; (ii) copied or reproduced for any reason other than specific application needs; or (iii) rented, leased, lent, sublicensed, distributed, remarketed, or in any way transferred; without the prior written authorization of Siemens. This proprietary notice and any other associated labels may not be removed. TRANSLATIONS The manuals and product information of Siemens Mobility, Inc. are intended to be produced and read in English. Any translation of the manuals and product information are unofficial and can be imprecise and inaccurate in whole or in part. Siemens Mobility, Inc. does not warrant the accuracy, reliability, or timeliness of any information contained in any translation of manual or product information from its original official released version in English and shall not be liable for any losses caused by such reliance on the accuracy, reliability, or timeliness of such information. Any person or entity that relies on translated information does so at his or her own risk. -
Influence of Train Control System on Railway Track Capacity
DAAAM INTERNATIONAL SCIENTIFIC BOOK 2012 pp. 419-426 CHAPTER 36 INFLUENCE OF TRAIN CONTROL SYSTEM ON RAILWAY TRACK CAPACITY HARAMINA, H.; BRABEC, D. & GRGIC, D. Abstract: The basic advantage of the train control methods based on the moving block technology compared to the fixed blocks where the headways of the slower trains, regarding their longer blocking times affects negatively the line capacity, lies in the fact that the position and the length of the moving blocks adapts to the position, dynamic characteristics, and actual speed of the successive train. Regarding a higher possibility for influence on the train movement characteristic during the moving block train operation, better traffic fluidity with more regular traffic flow can be achieved. Considering this fact an amount of regular recovery and buffer times needed for railway timetable stability can be decreased and thus more train paths in a particular dedicated time window can be added. In this way the moving block technology can increase the capacity of a railway line, especially in case of high density lines with significant heterogeneity of traffic. Key words: train control system, railway infrastructure capacity, moving block Authors´ data: Dr. Sc. Haramina, H[rvoje]; dipl.ing. Brabec, D[ean]* Dr. Sc. Grgić, D[amir]**; *University of Zagreb, Faculty of Transport and Traffic Sciences, Vukelićeva 4, Zagreb, Croatia, **Hrvatske željeznice, Mihanovićeva 12, Zagreb, Croatia; [email protected], [email protected], [email protected] This Publication has to be referred as: Haramina H[rvoje]; Brabec, D[ean] & Grgić, D[amir] (2012). Influence of Train Control System on Railway Track Capacity, Chapter 36 in DAAAM International Scientific Book 2012, pp. -
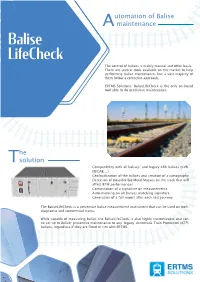
Balise Lifecheck the Control of Balises Is Mainly Manual and Often Basic
utomation of Balise A maintenance Balise LifeCheck The control of balises is mainly manual and often basic. There are several tools available on the market to help performing balise maintenance, but a vast majority of them follow a corrective approach. ERTMS Solutions’ BaliseLifeCheck is the only on-board tool able to do predictive maintenance. he Tsolution • Compatibility with all balises’ and legacy KER balises (KVB, EBICAB,...) • Geolocalization of the balises and creation of a cartography • Detection of possible Big Metal Masses on the track that will affect BTM performances • Computation of a signature on measurements • Auto-marking on all balises matching signature • Generation of a full report after each test journey The BaliseLifeCheck is a preventive balise measurement instrument that can be used on both diagnostic and commercial trains. While capable of measuring balise, the BaliseLifeCheck is also highly customizable and can be set-up to deliver preventive maintenance to any ‘legacy’ Automatic Train Protection (ATP) balises, regardless if they are fitted or not with ERTMS. The Benefits On-board The system has been designed to be installed on-board a test or maintenance train which purpose is to analyze test tracks and active lines. Measurement It measures key electrical parameters of the up link signal and verifies if they comply with the requirements of Subset-036 in the case of ETCS balises. In this case some measurements/tests are performed against requirements of Subset-085. Diagnosis The main goal of the tool is to provide measurements and evidences which assess the correct behavior of balises that are already deployed on the field. -

X2rail-1 Deliverable D7.1 Analysis of Existing Lines and Economic Models
X2Rail-1 Project Title: Start-up activities for Advanced Signalling and Automation Systems Starting date: 01/09/2016 Duration in months: 36 Call (part) identifier: H2020-S2RJU-CFM-2015-01-1 Grant agreement no: 730640 Deliverable D7.1 Analysis of existing lines and economic models Due date of deliverable Month 09 Actual submission date 18-02-2019 Organization name of lead contractor for this deliverable 18-TTS Dissemination level PU Revision DB-001-02-R2 Deliverable template version: 02 (09/11/16) X2Rail-1 Deliverable D7.1 Analysis of existing lines and economic models Authors Author(s) Alstom Transport S.A. (ALS) Pierre Damien Jourdain AZD Praha SRO (AZD) Michal Pavel Lukas Michalik BOMBARDIER TRANSPORTATION SWEDEN AB (BTSE) Jorgen Mattisson INDRA (INDRA) Francisco Parrilla Thales Transportation Systems GMBH (TTS) Ana Millán Belen Losada Trafikverket – TRV (TRV) Jan Bystrom Contributor(s) ANSALDO STS S.p.A. (ASTS) Giovanni Canepa CAF Signalling S.L. (CAF) Ignacio Gonzalez Deutsche Bahn AG (DB) Julian Mohr MERMEC SPA (MERMEC) Vito Caliandro Siemens (SIE) Jose Manuel Mellado GA 730640 Page 2 of 165 X2Rail-1 Deliverable D7.1 Analysis of existing lines and economic models 1. Executive Summary The present document constitutes the first issue of Deliverable D7.1 “Analysis of existing lines and economic models” in the framework of the Project titled “Start-up activities for Advanced Signalling and Automation Systems” (Project Acronym: X2Rail-1; Grant Agreement No 730640). Although modern signalling systems are going to considerably reduce trackside equipment in the next years, a source of the innovation step proposed by the X2Rail-1 WP7 is to provide fully distributed control of remote trackside objects such as points, level crossings, etc., without requiring the necessity to install specialized trackside cabling and associated cable routes, ducting etc. -
Next Generation Train Control (NGTC): More Effective Railways Through the Convergence of Main-Line and Urban Train Control Systems
Available online at www.sciencedirect.com ScienceDirect Transportation Research Procedia 14 ( 2016 ) 1855 – 1864 6th Transport Research Arena April 18-21, 2016 Next Generation Train Control (NGTC): more effective railways through the convergence of main-line and urban train control systems Peter Gurník a,* aUNIFE – The European Rail Industry, 221 avenue Louise, B-1050 Brussels, Belgium Abstract The main scope of Next Generation Train Control (NGTC) project is to analyse the commonality and differences of required functionality for mainline and urban lines and develop the convergence of both European Train Control System (ETCS) and Communication Based Train Control (CBTC) systems, determining the level of commonality of architecture, hardware platforms, and system design that can be achieved. This will be accomplished by building on the experience of ETCS and its standardised train protection kernel, where the different manufacturers can deliver equipment based on the same standardized specifications and by using the experience the suppliers have gained by having developed very sophisticated and innovative CBTC systems around the world. The paper focuses on the analyses of the already produced NGTC Functional Requirements Specifications and is summarizing other project activities on various train control technology developments suitable for future train control systems. © 2016 The Authors. Published by Elsevier B.V. This is an open access article under the CC BY-NC-ND license (©http://creativecommons.org/licenses/by-nc-nd/4.0/ 2016The Authors. Published by Elsevier B.V..). PeerPeer-review-review under under responsibility responsibility of Road of Road and Bridgeand Bridge Research Research Institute Institute (IBDiM) (IBDiM). Keywords: Railways; signalling; automation; ERTMS / ETCS; CBTC; ATO; ATP; ATS; FRS, SRS; Moving Block; IP Radio Communication; GNSS * Corresponding author. -

11 /2015 November 1 € 22 1 C 11 180
11 /2015 November 1 € 22 1 C 11 180 www.eurailpress.de/sd Rail Signalling and Telecommunication • INSTANDHALTUNG • SICHERHEIT • ETCS Deutliche Effizienzsteigerung GFR 2000: Eine Lösung zur The implementation of durch den Einsatz von Gefahrenraumfreimeldung an ETCS Level 1 in the mobilen Anwendungen Bahnübergängen Slovenian sector of Corridor D • Satellite-based train control systems Cost efficiency analysis of the satellite based train control system 31nSat in Germany Benedikt Seheier / Anja Bussmann / Florian Brinkmann / Uwe Wendland DB Netz AG is aiming at cost effective several international project partners the highest comparability with the oth alternatives to conventional train con are involved, including DB Netz AG and er systems that have no sophisticated trol systems on low density lines. For the German Aerospace Center (DLR). fall-back technology), this purpose, the cost efficiency of the The project's work plan comprises sev • ERTMS-Regional, (a cost-reduced 31nSat system - a satellite-based plat eral work packages regarding nation variant of ETCS Level 3 for region form for train protection - is analysed al scenarios of a number of countries. al lines without conventional lineside by comparing the net present value of Besides the economic assessment, the signals and without track-side train equipment cost for 31nSat with the al German scenario includes a compari detection) and ternative systems ERTMS-Regional, son of the system's functionalities with • Germany's common conventional sig ETCS Level 2 without lineside signals the operational procedures and require nalling system (the so-called Ks-Sys and conventional signalling. From the ments of the German rail system. From tem).