Geomechanics to Solve Geological Structure Issues: Forward, Inverse and Restoration Modeling Frantz Maerten
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Introduction San Andreas Fault: an Overview
Introduction This volume is a general geology field guide to the San Andreas Fault in the San Francisco Bay Area. The first section provides a brief overview of the San Andreas Fault in context to regional California geology, the Bay Area, and earthquake history with emphasis of the section of the fault that ruptured in the Great San Francisco Earthquake of 1906. This first section also contains information useful for discussion and making field observations associated with fault- related landforms, landslides and mass-wasting features, and the plant ecology in the study region. The second section contains field trips and recommended hikes on public lands in the Santa Cruz Mountains, along the San Mateo Coast, and at Point Reyes National Seashore. These trips provide access to the San Andreas Fault and associated faults, and to significant rock exposures and landforms in the vicinity. Note that more stops are provided in each of the sections than might be possible to visit in a day. The extra material is intended to provide optional choices to visit in a region with a wealth of natural resources, and to support discussions and provide information about additional field exploration in the Santa Cruz Mountains region. An early version of the guidebook was used in conjunction with the Pacific SEPM 2004 Fall Field Trip. Selected references provide a more technical and exhaustive overview of the fault system and geology in this field area; for instance, see USGS Professional Paper 1550-E (Wells, 2004). San Andreas Fault: An Overview The catastrophe caused by the 1906 earthquake in the San Francisco region started the study of earthquakes and California geology in earnest. -

Monoclinal Flexure of an Orogenic Plateau Margin During Subduction, South Turkey
Non-peer reviewed preprint submitted to EarthArXiv Monoclinal flexure of an orogenic plateau margin during subduction, south Turkey Running title: Monoclinal flexure plateau margin David Fernández-Blanco1, Giovanni Bertotti2, Ali Aksu3 and Jeremy Hall3 1Tectonics and Structural Geology Department, Faculty of Earth and Life Sciences, Vrije Universiteit Amsterdam, De Boelelaan 1085, 1081 HV Amsterdam, the Netherlands [email protected] 2Department of Geotechnology, Faculty of Civil Engineering and Geosciences, Delft University of Technology, Stevinweg 1, 2628CN, Delft, the Netherlands 3 Department of Earth Sciences, Centre for Earth Resources Research, Memorial University of Newfoundland, St. John's, Newfoundland, Canada A1B 3X5 Non-peer reviewed preprint submitted to EarthArXiv Abstract Geologic evidence across orogenic plateau margins helps to discriminate the relative contributions of orogenic, epeirogenic and/or climatic processes leading to growth and maintenance of orogenic plateaus and plateau margins. Here, we discuss the mode of formation of the southern margin of the Central Anatolian Plateau (SCAP), and evaluate its time of formation, using fieldwork in the onshore and seismic reflection data in the offshore. In the onshore, uplifted Miocene rocks in a dip-slope topography show monocline flexure over >100 km, few-km asymmetric folds verging south, and outcrop- scale syn-sedimentary reverse faults. On the Turkish shelf, vertical faults transect the basal latest Messinian of a ~10 km fold where on-structure syntectonic wedges and synsedimentary unconformities indicate pre-Pliocene uplift and erosion followed by Pliocene and younger deformation. Collectively, Miocene rocks delineate a flexural monocline at plateau margin scale, expressed along our on-offshore sections as a kink- band fold with a steep flank ~20–25 km long. -

Lesson 3 Forces That Build the Land Main Idea
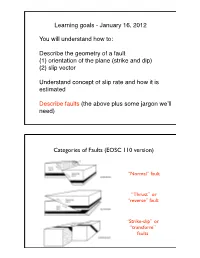
Lesson 3 Forces That Build the Land Main Idea Many landforms result from changes and movements in Earth’s crust. Objectives Identify types of landforms and the processes that form them. Describe what happens when an earthquake occurs. Vocabulary fault focus aftershock seismic wave epicenter seismograph magnitude vent What forces change Earth’s crust? At transform boundaries, the pieces of rock rub together in a force called shearing, like the blades of a pair of scissors, causing the rock to break. At convergent boundaries, plates collide and this force is called compression, squeezing the rock together. At divergent boundaries, plates separate causing tension, making the crust longer and thinner eventually breaking and creating a fault. Faults are usually located along the boundaries between tectonic plates. Three Kinds of Faults Shearing forms strike-slip faults. Tension forms normal faults. The rock above the fault moves down. Compression forms reverse faults. The rock above the fault moves up. Uplifted Landforms Folded mountains are mostly made up of rock layers folded by being squeezed together. Fault-block mountains are made by huge, tilted blocks of rock separated from the surrounding rock by faults. The Colorado Plateau was formed when rock layers were pushed upward. The Colorado River eventually formed the Grand Canyon. Quick Check Infer Why are faults often produced along plate boundaries? Forces act on the crust most directly at plate boundaries, because these locations are where plates are moving, relative to each other. Critical Thinking Why do some mountains form as folded mountains and others form as fault-block mountains? Compression forces form folded mountains, and tension forms fault- block mountains. -

Structural Modeling Based on Sequential Restoration of Gravitational Salt Deformation in the Santos Basin (Brazil)
Marine and Petroleum Geology xxx (2012) 1e17 Contents lists available at SciVerse ScienceDirect Marine and Petroleum Geology journal homepage: www.elsevier.com/locate/marpetgeo Structural modeling based on sequential restoration of gravitational salt deformation in the Santos Basin (Brazil) Sávio Francis de Melo Garcia a,*, Jean Letouzey b, Jean-Luc Rudkiewicz b, André Danderfer Filho c, Dominique Frizon de Lamotte d a Petrobras E&P-EXP, Rio de Janeiro, Brazil b IFP Energies Nouvelles, France c Universidade Federal de Ouro Preto, Ouro Preto/MG, Brazil d Université de Cergy-Pontoise, France article info abstract Article history: The structural restoration of two parallel cross-sections in the central portion of the Santos Basin enables Received 8 December 2010 a first understanding of existent 3D geological complexities. Santos Basin is one of the most proliferous Received in revised form basins along the South Atlantic Brazilian margin. Due to the halokinesis, geological structures present 22 November 2011 significant horizontal tectonic transport. The two geological cross-sections extend from the continental shelf Accepted 2 February 2012 to deep waters, in areas where salt tectonics is simple enough to be solved by 2D restoration. Such cross- Available online xxx sections display both extensional and compressional deformation. Paleobathymetry, isostatic regional compensation, salt volume control and overall aspects related to structural style were used to constrain basic Keywords: fl Salt tectonics boundary conditions. Several restoration -

Part 3: Normal Faults and Extensional Tectonics
12.113 Structural Geology Part 3: Normal faults and extensional tectonics Fall 2005 Contents 1 Reading assignment 1 2 Growth strata 1 3 Models of extensional faults 2 3.1 Listric faults . 2 3.2 Planar, rotating fault arrays . 2 3.3 Stratigraphic signature of normal faults and extension . 2 3.4 Core complexes . 6 4 Slides 7 1 Reading assignment Read Chapter 5. 2 Growth strata Although not particular to normal faults, relative uplift and subsidence on either side of a surface breaking fault leads to predictable patterns of erosion and sedi mentation. Sediments will fill the available space created by slip on a fault. Not only do the characteristic patterns of stratal thickening or thinning tell you about the 1 Figure 1: Model for a simple, planar fault style of faulting, but by dating the sediments, you can tell the age of the fault (since sediments were deposited during faulting) as well as the slip rates on the fault. 3 Models of extensional faults The simplest model of a normal fault is a planar fault that does not change its dip with depth. Such a fault does not accommodate much extension. (Figure 1) 3.1 Listric faults A listric fault is a fault which shallows with depth. Compared to a simple planar model, such a fault accommodates a considerably greater amount of extension for the same amount of slip. Characteristics of listric faults are that, in order to maintain geometric compatibility, beds in the hanging wall have to rotate and dip towards the fault. Commonly, listric faults involve a number of en echelon faults that sole into a lowangle master detachment. -

Kinematics of the Northern Walker Lane: an Incipient Transform Fault Along the Pacific–North American Plate Boundary
Kinematics of the northern Walker Lane: An incipient transform fault along the Paci®c±North American plate boundary James E. Faulds Christopher D. Henry Nevada Bureau of Mines and Geology, MS 178, University of Nevada, Reno, Nevada 89557, USA Nicholas H. Hinz ABSTRACT GEOLOGIC SETTING In the western Great Basin of North America, a system of dextral faults accommodates As western North America has evolved 15%±25% of the Paci®c±North American plate motion. The northern Walker Lane in from a convergent to a transform margin in northwest Nevada and northeast California occupies the northern terminus of this system. the past 30 m.y., the northern Walker Lane has This young evolving part of the plate boundary offers insight into how strike-slip fault undergone widespread volcanism and tecto- systems develop and may re¯ect the birth of a transform fault. A belt of overlapping, left- nism. Tertiary volcanic strata include 31±23 stepping dextral faults dominates the northern Walker Lane. Offset segments of a W- Ma ash-¯ow tuffs associated with the south- trending Oligocene paleovalley suggest ;20±30 km of cumulative dextral slip beginning ward-migrating ``ignimbrite ¯are up,'' 22±5 ca. 9±3 Ma. The inferred long-term slip rate of ;2±10 mm/yr is compatible with global Ma calc-alkaline intermediate-composition positioning system observations of the current strain ®eld. We interpret the left-stepping rocks related to the ancestral Cascade arc, and faults as macroscopic Riedel shears developing above a nascent lithospheric-scale trans- 13 Ma to present bimodal rocks linked to Ba- form fault. -

Tectonic Evolution of Structures in Southern Sindh Monocline, Indus Basin, Pakistan Formed in Multi-Extensional Tectonic Episodes of Indian Plate
Tectonic Evolution of Structures in Southern Sindh Monocline, Indus Basin, Pakistan Formed in Multi-Extensional Tectonic Episodes of Indian Plate Sarfraz Hussain Solangi, Shabeer Ahmed, Muhammad Akram Qureshi, Mohammad Shahid, Uzair Hamid Awan Universityof Sindh, Pakistan Summary There are number of structures and structural styles found in extensional tectonic settings of the world but the evolution of these structuresis still needful and a big challenge as well. Evolution of structures in extensional settings have been studied by Yuan Li et al., (2016)and many other reserachers on different extensional basins of the world. Sindh Monocline lies on the western corner of Indian Plate and the tectonic history of Indian plate has been well described by Chatterjee et al., (2013) while tectonic history of Sindh Monocline has been studied by Zaigham, and Mallick, (2000), Chatterjee et al., (2013) (Fig.1). The aim of this study is the evolution of structures in the subsurface of Southern Sindh Monocline, Pakistan using the seismic data interpretation and faltenning of horizons approach. Jamaluddin et al., (2015) and others have also testified such approach. Southern Sindh Monocline is charaterized and experienced by different tectonic episodes of Indian plate while rifting from Gondwanaland, rifting from other plates at different geological times and to its collision with the Asia. Basic structures with in study area are classified into nine types whilethe structural styles have been classified into six types as horst and grabens,dominos,crotch,synthetic -

Late Mesozoic Compressional to Extensional Tectonics in The
Late Mesozoic compressional to extensional tectonics in the Yiwulüshan massif, NE China and its bearing on the evolution of the Yinshan-Yanshan orogenic belt: Part I: Structural analyses and geochronological constraints Wei Lin, Michel Faure, Yan Chen, Wenbin Ji, Fei Wang, Lin Wu, Nicolas Charles, Jun Wang, Qingchen Wang To cite this version: Wei Lin, Michel Faure, Yan Chen, Wenbin Ji, Fei Wang, et al.. Late Mesozoic compressional to extensional tectonics in the Yiwulüshan massif, NE China and its bearing on the evolution of the Yinshan-Yanshan orogenic belt: Part I: Structural analyses and geochronological constraints. Gond- wana Research, Elsevier, 2013, 23 (1), pp.54-77. 10.1016/j.gr.2012.02.013. insu-00681290 HAL Id: insu-00681290 https://hal-insu.archives-ouvertes.fr/insu-00681290 Submitted on 21 Aug 2012 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Late Mesozoic compressional to extensional tectonics in the Yiwulüshan massif, NE China and its bearing on the evolution of the Yinshan–Yanshan orogenic belt: Part I: Structural analyses and geochronological constraints Wei Lina Michel Faureb Yan Chenb Wenbin Jia Fei Wanga Lin Wua Nicolas Charlesb Jun Wanga Qingchen Wanga a State Key Laboratory of Lithospheric Evolution, Institute of Geology and Geophysics, Chinese Academy of Sciences, P.O. -
Describe the Geometry of a Fault (1) Orientation of the Plane (Strike and Dip) (2) Slip Vector
Learning goals - January 16, 2012 You will understand how to: Describe the geometry of a fault (1) orientation of the plane (strike and dip) (2) slip vector Understand concept of slip rate and how it is estimated Describe faults (the above plus some jargon weʼll need) Categories of Faults (EOSC 110 version) “Normal” fault “Thrust” or “reverse” fault “Strike-slip” or “transform” faults Two kinds of strike-slip faults Right-lateral Left-lateral (dextral) (sinistral) Stand with your feet on either side of the fault. Which side comes toward you when the fault slips? Another way to tell: stand on one side of the fault looking toward it. Which way does the block on the other side move? Right-lateral Left-lateral (dextral) (sinistral) 1992 M 7.4 Landers, California Earthquake rupture (SCEC) Describing the fault geometry: fault plane orientation How do you usually describe a plane (with lines)? In geology, we choose these two lines to be: • strike • dip strike dip • strike is the azimuth of the line where the fault plane intersects the horizontal plane. Measured clockwise from N. • dip is the angle with respect to the horizontal of the line of steepest descent (perpendic. to strike) (a ball would roll down it). strike “60°” dip “30° (to the SE)” Profile view, as often shown on block diagrams strike 30° “hanging wall” “footwall” 0° N Map view Profile view 90° W E 270° S 180° Strike? Dip? 45° 45° Map view Profile view Strike? Dip? 0° 135° Indicating direction of slip quantitatively: the slip vector footwall • let’s define the slip direction (vector) -

Systematic Variation of Late Pleistocene Fault Scarp Height in the Teton Range, Wyoming, USA: Variable Fault Slip Rates Or Variable GEOSPHERE; V
Research Paper THEMED ISSUE: Cenozoic Tectonics, Magmatism, and Stratigraphy of the Snake River Plain–Yellowstone Region and Adjacent Areas GEOSPHERE Systematic variation of Late Pleistocene fault scarp height in the Teton Range, Wyoming, USA: Variable fault slip rates or variable GEOSPHERE; v. 13, no. 2 landform ages? doi:10.1130/GES01320.1 Glenn D. Thackray and Amie E. Staley* 8 figures; 1 supplemental file Department of Geosciences, Idaho State University, 921 South 8th Avenue, Pocatello, Idaho 83209, USA CORRESPONDENCE: thacglen@ isu .edu ABSTRACT ously and repeatedly to climate shifts in multiple valleys, they create multi CITATION: Thackray, G.D., and Staley, A.E., 2017, ple isochronous markers for evaluation of spatial and temporal variation of Systematic variation of Late Pleistocene fault scarp height in the Teton Range, Wyoming, USA: Variable Fault scarps of strongly varying height cut glacial and alluvial sequences fault motion (Gillespie and Molnar, 1995; McCalpin, 1996; Howle et al., 2012; fault slip rates or variable landform ages?: Geosphere, mantling the faulted front of the Teton Range (western USA). Scarp heights Thackray et al., 2013). v. 13, no. 2, p. 287–300, doi:10.1130/GES01320.1. vary from 11.2 to 37.6 m and are systematically higher on geomorphically older In some cases, faults of known slip rate can also be used to evaluate ages landforms. Fault scarps cutting a deglacial surface, known from cosmogenic of glacial and alluvial sequences. However, this process is hampered by spatial Received 26 January 2016 Revision received 22 November 2016 radionuclide exposure dating to immediately postdate 14.7 ± 1.1 ka, average and temporal variability of offset along individual faults and fault segments Accepted 13 January 2017 12.0 m in height, and yield an average postglacial offset rate of 0.82 ± 0.13 (e.g., Z. -

The Role of Pressure Solution Seam and Joint Assemblages In
THE ROLE OF PRESSURE SOLUTION SEAM AND JOINT ASSEMBLAGES IN THE FORMATION OF STRIKE-SLIP AND THRUST FAULTS IN A COMPRESSIVE TECTONIC SETTING; THE VARISCAN OF SOUTHWESTERN IRELAND Filippo Nenna and Atilla Aydin Department of Geological and Environmental Sciences, Stanford University, Stanford, CA 94305 e-mail: [email protected] scale such as strike-slip faults and thrust-cored folds in Abstract various stages of their development. In this study we focus on the initiation and development of strike-slip The Ross Sandstone in County Clare, Ireland, was faults by shearing of the initial JVs and PSSs and deformed by an approximately north-south compression formation of thrust faults by exploiting weak shale during the end-Carboniferous Variscan orogeny. horizons and the strike-parallel PSSs in the adjacent Orthogonal sets of fundamental structures form the sandstone intervals. initial assemblage; mutually abutting arrays of 170˚ Development of faults from shearing of initial oriented set 1 joints/veins (JVs) and approximately 75˚ fundamental structural elements with either opening or pressure solution seams (PSSs) that formed under the closing modes in a wide range of structural settings has same stress conditions. Orientations of set 2 (splay) JVs been extensively reported. Segall and Pollard (1983), and PSSs suggest a clockwise remote stress rotation of Martel and Pollard (1989) and Martel (1990) have about 35˚ responsible for the contemporaneous described strike-slip faults formed by shearing of shearing of the set 1 arrays. Prominent strike-slip faults thermal fractures in granitic rocks. Myers and Aydin are sub-parallel to set 1 JVs and form by the linkage of (2004) and Flodin and Aydin (2004) reported strike-slip en-echelon segments with broad damage zones faulting formed by shearing of joints formed by an responsible for strike-slip offsets of hundreds of metres. -

Structural and Metamorphic Investigation of the Cathedral Rock – Drew Hill Area, Olary Domain, South Australia
STRUCTURAL AND METAMORPHIC INVESTIGATION OF THE CATHEDRAL ROCK – DREW HILL AREA, OLARY DOMAIN, SOUTH AUSTRALIA. Jonathan Clark (B.Sc.) Department of Geology and Geophysics University of Adelaide This thesis is submitted as a partial fulfilment for the Honours Degree of a Bachelor of Science November 1999 Australian National Grid Reference (SI 54-2) 1:250 000 i ABSTRACT The Cathedral Rock – Drew Hill area represents a typical Proterozoic high-grade gneiss terrain, and provides an excellent basis for the study of the structural and metamorphic geology in early earth history. Rocks from this are comprised of Willyama Supergroup metasediments, which have been subjected to polydeformation. The highly strained nature of the area has been attributed to three deformations. These have been superimposed into a single structure, the Cathedral Rock synform, which represents a second-generation fold that refolds the F1 axial surface. Pervasive deformation with a northwest transport direction firstly resulted in the formation of a thin-skinned duplex terrain. Crustal thickening in the middle to lower crust led to the reactivation of basement normal faults in a reverse sense. Further compression, led to more intense folding and thrusting associated with the later part of the Olarian Orogeny. Strain analysis has shown that the region of greatest strain occurs between the Cathedral Rock and Drew Hill shear zones. Cross section restoration showed that this area has undergone approximately 65% shortening. Further analysis showed that strain fluctuated across the area and was affected by the competence of different lithologies and the degree of recrystallisation. ii Contents Abstract (ii) List of Plates, Tables and Figures (v) Acknowledgments (vi) CHAPTER 1:INTRODUCTION 1 1.1.