Resident Programs Chapter 18
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Pdp11-40.Pdf
processor handbook digital equipment corporation Copyright© 1972, by Digital Equipment Corporation DEC, PDP, UNIBUS are registered trademarks of Digital Equipment Corporation. ii TABLE OF CONTENTS CHAPTER 1 INTRODUCTION 1·1 1.1 GENERAL ............................................. 1·1 1.2 GENERAL CHARACTERISTICS . 1·2 1.2.1 The UNIBUS ..... 1·2 1.2.2 Central Processor 1·3 1.2.3 Memories ........... 1·5 1.2.4 Floating Point ... 1·5 1.2.5 Memory Management .............................. .. 1·5 1.3 PERIPHERALS/OPTIONS ......................................... 1·5 1.3.1 1/0 Devices .......... .................................. 1·6 1.3.2 Storage Devices ...................................... .. 1·6 1.3.3 Bus Options .............................................. 1·6 1.4 SOFTWARE ..... .... ........................................... ............. 1·6 1.4.1 Paper Tape Software .......................................... 1·7 1.4.2 Disk Operating System Software ........................ 1·7 1.4.3 Higher Level Languages ................................... .. 1·7 1.5 NUMBER SYSTEMS ..................................... 1-7 CHAPTER 2 SYSTEM ARCHITECTURE. 2-1 2.1 SYSTEM DEFINITION .............. 2·1 2.2 UNIBUS ......................................... 2-1 2.2.1 Bidirectional Lines ...... 2-1 2.2.2 Master-Slave Relation .. 2-2 2.2.3 Interlocked Communication 2-2 2.3 CENTRAL PROCESSOR .......... 2-2 2.3.1 General Registers ... 2-3 2.3.2 Processor Status Word ....... 2-4 2.3.3 Stack Limit Register 2-5 2.4 EXTENDED INSTRUCTION SET & FLOATING POINT .. 2-5 2.5 CORE MEMORY . .... 2-6 2.6 AUTOMATIC PRIORITY INTERRUPTS .... 2-7 2.6.1 Using the Interrupts . 2-9 2.6.2 Interrupt Procedure 2-9 2.6.3 Interrupt Servicing ............ .. 2-10 2.7 PROCESSOR TRAPS ............ 2-10 2.7.1 Power Failure .............. -

Embedded C Programming I (Ecprogrami)
To our customers, Old Company Name in Catalogs and Other Documents On April 1st, 2010, NEC Electronics Corporation merged with Renesas Technology Corporation, and Renesas Electronics Corporation took over all the business of both companies. Therefore, although the old company name remains in this document, it is a valid Renesas Electronics document. We appreciate your understanding. Renesas Electronics website: http://www.renesas.com April 1st, 2010 Renesas Electronics Corporation Issued by: Renesas Electronics Corporation (http://www.renesas.com) Send any inquiries to http://www.renesas.com/inquiry. Notice 1. All information included in this document is current as of the date this document is issued. Such information, however, is subject to change without any prior notice. Before purchasing or using any Renesas Electronics products listed herein, please confirm the latest product information with a Renesas Electronics sales office. Also, please pay regular and careful attention to additional and different information to be disclosed by Renesas Electronics such as that disclosed through our website. 2. Renesas Electronics does not assume any liability for infringement of patents, copyrights, or other intellectual property rights of third parties by or arising from the use of Renesas Electronics products or technical information described in this document. No license, express, implied or otherwise, is granted hereby under any patents, copyrights or other intellectual property rights of Renesas Electronics or others. 3. You should not alter, modify, copy, or otherwise misappropriate any Renesas Electronics product, whether in whole or in part. 4. Descriptions of circuits, software and other related information in this document are provided only to illustrate the operation of semiconductor products and application examples. -

Chapter 3. Booting Operating Systems
Chapter 3. Booting Operating Systems Abstract: Chapter 3 provides a complete coverage on operating systems booting. It explains the booting principle and the booting sequence of various kinds of bootable devices. These include booting from floppy disk, hard disk, CDROM and USB drives. Instead of writing a customized booter to boot up only MTX, it shows how to develop booter programs to boot up real operating systems, such as Linux, from a variety of bootable devices. In particular, it shows how to boot up generic Linux bzImage kernels with initial ramdisk support. It is shown that the hard disk and CDROM booters developed in this book are comparable to GRUB and isolinux in performance. In addition, it demonstrates the booter programs by sample systems. 3.1. Booting Booting, which is short for bootstrap, refers to the process of loading an operating system image into computer memory and starting up the operating system. As such, it is the first step to run an operating system. Despite its importance and widespread interests among computer users, the subject of booting is rarely discussed in operating system books. Information on booting are usually scattered and, in most cases, incomplete. A systematic treatment of the booting process has been lacking. The purpose of this chapter is to try to fill this void. In this chapter, we shall discuss the booting principle and show how to write booter programs to boot up real operating systems. As one might expect, the booting process is highly machine dependent. To be more specific, we shall only consider the booting process of Intel x86 based PCs. -

Operating Systems What Is an Operating System Real-Time
Operating Systems Babak Kia Adjunct Professor Boston University College of Engineering Email: bkia -at- bu.edu ENG SC757 - Advanced Microprocessor Design What is an Operating System z Operating System handles • Memory Addressing & Management • Interrupt & Exception Handling • Process & Task Management • File System • Timing • Process Scheduling & Synchronization z Examples of Operating Systems • RTOS – Real-Time Operating System • Single-user, Single-task: example PalmOS • Single-user, Multi-task: MS Windows and MacOS • Multi-user, Multi-task: UNIX 2 Real-Time Operating Systems z Operating systems come in two flavors, real-time versus non real-time z The difference between the two is characterized by the consequences which result if functional correctness and timing parameters are not met in the case of real-time operating systems z Real-time operating systems themselves have two varieties, soft real-time systems and hard real- time systems z Examples of real-time systems: • Food processing • Engine Controls • Anti-lock breaking systems 3 1 Soft versus Hard Real-Time z In a soft real-time system, tasks are completed as fast as possible without having to be completed within a specified timeframe z In a hard real-time operating system however, not only must tasks be completed within the specified timeframe, but they must also be completed correctly 4 Foreground/Background Systems z The simplest forms of a non real-time operating systems are comprised of super-loops and are called foreground/background systems z Essentially this is an application -
Reentrant Code
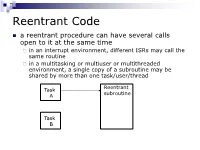
Reentrant Code a reentrant procedure can have several calls open to it at the same time in an interrupt environment, different ISRs may call the same routine in a multitasking or multiuser or multithreaded environment, a single copy of a subroutine may be shared by more than one task/user/thread Reentrant Task subroutine A Task B Reentrant Code Characteristics requirements: 1. any parameters or local variables must be on the stack frame 2. registers may be used for parameters and local variables but must be saved on or restored from the stack at beginning/end of the subroutine 3. guarantee that each call of the subroutine will create a separate stack frame to maintain data integrity 4. no self-modifying code Recursion recursive code must be reentrant recursive reentrant but reentrant recursive e.g. calculating 3! using recursion main move.w number,D0 pass the number jsr fact start recursive rtn move.w D0,result store the factorial stop #$2700 number dc.w 3 result ds.w 1 fact link A6,#-2 Stack structure move.w D0,-2(A6) subq.w #1,D0 bne push move.w -2(A6),D0 bra return push jsr fact mulu -2(A6),D0 return unlk A6 rts end main SP ->/////// A much more complex example: X: array [0..30] of words Y: longword Z, ALPHA, N: byte call order is S/R demo(X, Y, Z, ALPHA, N ) N is passed/returned by value, all others are passed by reference demo(X[w:31], Y[l], Z[b], ALPHA[b], N[b]) main CLR.W D2 zero entire word MOVE.B N,D2 N to low byte MOVE.W D2,-(SP) N on stack PEA ALPHA push arguments PEA Z in reverse order PEA Y PEA X JSR demo call -

Wavetek 488RT Manual
Full-service, independent repair center -~ ARTISAN® with experienced engineers and technicians on staff. TECHNOLOGY GROUP ~I We buy your excess, underutilized, and idle equipment along with credit for buybacks and trade-ins. Custom engineering Your definitive source so your equipment works exactly as you specify. for quality pre-owned • Critical and expedited services • Leasing / Rentals/ Demos equipment. • In stock/ Ready-to-ship • !TAR-certified secure asset solutions Expert team I Trust guarantee I 100% satisfaction Artisan Technology Group (217) 352-9330 | [email protected] | artisantg.com All trademarks, brand names, and brands appearing herein are the property o f their respective owners. Find the Rockwell / Allen-Bradley 1784-T45 at our website: Click HERE WAVETEK WaveTese Runtime 488-RT WAVETE ST SOFTyARE PREFACE WaveTest Runtime (488-R1) enables you to run already developed and debugged automatic test programs. Clear. easy-to -use screens with pull-down menus guide you through program execu- tion. Programs developed with WaveTest (488) can be loaded and exe- cuted. The operator will have available all of the operator dialogs and runtime output that have been included in the test program. There are no editing capabilities. Chapter 1. Configuring Chapter 1 tells you how to setup WaveTest Runtime. This in- cludes ways to automatically load and run a test program. Chap- ter 1 also has useful information regarding how to effectively use the runtime environment of Windows. Chapter 2. Reference Chapter 2 describes the windows and menus available for access- ing test programs and controlloing their execution. Chapter 2 is not meant to be read through, but rather referred to for help with questions as they arise. -
Java Concurrency in Practice
Java Concurrency in practice Chapters: 1,2, 3 & 4 Bjørn Christian Sebak ([email protected]) Karianne Berg ([email protected]) INF329 – Spring 2007 Chapter 1 - Introduction Brief history of concurrency Before OS, a computer executed a single program from start to finnish But running a single program at a time is an inefficient use of computer hardware Therefore all modern OS run multiple programs (in seperate processes) Brief history of concurrency (2) Factors for running multiple processes: Resource utilization: While one program waits for I/O, why not let another program run and avoid wasting CPU cycles? Fairness: Multiple users/programs might have equal claim of the computers resources. Avoid having single large programs „hog“ the machine. Convenience: Often desirable to create smaller programs that perform a single task (and coordinate them), than to have one large program that do ALL the tasks What is a thread? A „lightweight process“ - each process can have many threads Threads allow multiple streams of program flow to coexits in a single process. While a thread share process-wide resources like memory and files with other threads, they all have their own program counter, stack and local variables Benefits of threads 1) Exploiting multiple processors 2) Simplicity of modeling 3) Simplified handling of asynchronous events 4) More responsive user interfaces Benefits of threads (2) Exploiting multiple processors The processor industry is currently focusing on increasing number of cores on a single CPU rather than increasing clock speed. Well-designed programs with multiple threads can execute simultaneously on multiple processors, increasing resource utilization. -

Memory Management
University of Mississippi eGrove American Institute of Certified Public Guides, Handbooks and Manuals Accountants (AICPA) Historical Collection 1993 Memory management American Institute of Certified Public Accountants. Information echnologyT Division Follow this and additional works at: https://egrove.olemiss.edu/aicpa_guides Part of the Accounting Commons, and the Taxation Commons Recommended Citation American Institute of Certified Public Accountants. Information echnologyT Division, "Memory management" (1993). Guides, Handbooks and Manuals. 486. https://egrove.olemiss.edu/aicpa_guides/486 This Book is brought to you for free and open access by the American Institute of Certified Public Accountants (AICPA) Historical Collection at eGrove. It has been accepted for inclusion in Guides, Handbooks and Manuals by an authorized administrator of eGrove. For more information, please contact [email protected]. INFORMATION TECHNOLOGY DIVISION BULLETIN AICPA American Institute of Certified Public Accountants TECHNOLOGY Notice to Readers This technology bulletin is the first in a series of bulletins that provide accountants with information about a particular technology. These bulletins are issued by the AICPA Information Technology Division for the benefit of Information Technology Section Members. This bulletin does not establish standards or preferred practice; it represents the opinion of the author and does not necessarily reflect the policies of the AICPA or the Information Technology Division. The Information Technology Division expresses its appreciation to the author of this technology bulletin, Liz O’Dell. She is employed by Crowe, Chizek and Company in South Bend, Indiana, as a manager of firmwide microcomputer operations, supporting both hardware and software applications. Liz is an Indiana University graduate with an associate’s degree in computer information systems and a bachelor’s degree in business management. -

Microsoft Windows for MS
Month Year Version Major Changes or Remarks Microsoft buys non-exclusive rights to market Pattersons Quick & Dirty Operating System from December 1980 QDOS Seattle Computer Products (Developed as 86-DOS) (Which is a clone of Digital Researches C P/M in virtually every respect) Microsoft buys all rights to 86-DOS from Seattle Computer Products, and the name MS-DOS is July 1981 86-DOS adopted for Microsoft's purposes and IBM PC- DOS for shipment with IBM PCs (For Computers with the Intel 8086 Processor) Digital Research release CP/M 86 for the Intel Q3 1981 CP/M 86 8086 Processer Pre-Release PC-DOS produced for IBM Personal Mid 1981 PC-DOS 1.0 Computers (IBM PC) Supported 16K of RAM, ~ Single-sided 5.25" 160Kb Floppy Disk OEM PC-DOS for IBM Corporation. (First August 1982 PC-DOS 1.1 Release Version) OEM Version for Zenith Computer Corporation.. (Also known as Z-DOS) This added support for September 1982 MS-DOS 1.25 Double-Sided 5.25" 320Kb Floppy Disks. Previously the disk had to be turned over to use the other side Digital Research release CP/M Plus for the Q4 1982 CP/M Plus Intel 8086 Processer OEM Version For Zenith - This added support for IBM's 10 MB Hard Disk, Directories and Double- March 1983 MS-DOS 2.0 Density 5.25" Floppy Disks with capacities of 360 Kb OEM PC-DOS for IBM Corporation. - Released March 1983 PC-DOS 2.0 to support the IBM XT Microsoft first announces it intention to create a GUI (Graphical User Interface) for its existing MS-DOS Operating System. -

Older Operating Systems
Older Operating Systems Class Notes # 14 Computer Configuration November 20, 2003 The default configuration of DOS, which may be adequate for many users, is intended to work with the greatest number of systems. DOS also allows users to take full advantage of their computers features. We could configure our computer to operate more efficiently. There are two general ways of making our computers efficient: • Add or replace hardware • Use software to attain an optimal configuration for existing hardware resources DOS falls in the second category. With DOS we can manage our memory more efficiently and we can also use special device drivers and utility programs to enhance the performance of our hardware and software. Device Drivers Device drivers are software programs, which is used by DOS to control hardware devices. Most device drivers are loaded at boot time by including the device driver in your CONFIG.SYS. The DEVICE command tells DOS to load a device driver and uses the following syntax: DEVICE = driver /switches The driver is the actual software for the device, and the /switches are any switches that the device driver software needs. For example, the mouse device driver (MOUSE.SYS) is loaded in the CONFIG.SYS file with this command: DEVICE = C:\DRIVERS\MOUSE.SYS The DEVICE = command tells DOS that the program file name MOUSE.SYS stored in the \DRIVERS directory on drive C is a TSR needed to drive the mouse device. You may also load certain device drivers in AUTOEXEC.BAT. For example, the mouse device driver can also be loaded from the AUTOEXEC.BAT file. -

T1000 Datasheet BT100AO 5/87
TOSHIBA Portable Persona] Computer o The srnaJJest, lightest Portable PC-just 6.4 pounds o IBM®compatibility-and true Toshiba portability 0 [email protected] in ROM o Portable PC Power at a very affordable price! T1000 Portable Personal Computer Pick up on the Tl 000 and you'll go Best of all, the TlOOO is a Toshiba including details on our Exceptional far! Toshiba's most affordable laptop computer, so you know it's advanced, Care service program and options to gives you desktop PC power wherever reliable, realistically priced, and fully tailor our computer to your growing you need it. For added convenience supported. Your dealer has all the facts, needs. Find out more today! and speed, this full-function portable uses the industry standard MS-DOS operating system in ROM. And because it's IBM compatible, you can draw on SPECIFICATIONS . the comprehensive array of software created for the IBM PC family. A full Standard interface 512KB of user memory, expandable --lJ-.--" ports broaden your to 640KB, means you can use very computing horizons. sophisticated programs. There's also • ~ Shown with a built-in 720KB diskette drive for • optional modem. generous storage capacity and all the advantages of the sturdy, popular, PROCESSOR STANDARD ACCESSORIES and easy-to-transport 3 Vz " diskettes. D 80C88, running at 4. 77MHz D AC adapter/battery charger D IBM PC® compatible DIMENSIONS D Real time clock/ calendar D 12.2flW x 2.05flH x 11.0flD; fits in desk MEMORY drawer D 512KB RAM, expandable to 640KB user D 6.4 lbs. -

Ramcram.Txt MEMORY MANAGEMENT for CD-ROM WORKSTATIONS
ramcram.txt MEMORY MANAGEMENT FOR CD-ROM WORKSTATIONS by Peter Brueggeman Scripps Institution of Oceanography Library University of California San Diego "Memory management for CD-ROM workstations, Part II", CD-ROM PROFESSIONAL, 4(6):74-78, November 1991. "Memory management for CD-ROM workstations, Part I", CD-ROM PROFESSIONAL, 4(5):39-43, September 1991. The nature of the memory in IBM compatible microcomputers can be confusing to understand and worse to manage. If you are lucky, everything runs fine on the CD-ROM workstation or network and an article on memory management will be interesting but lack immediacy. Try to load other software concurrent with CD-ROM software or to implement network access and you may be due for a crash course in DOS memory, its limitations, and management. Running CD-ROM software usually demands considerable memory resources. Software in general has become more memory-hungry with time, and CD-ROM software have a reputation for being very hungry. Many CD-ROM products state that 640K RAM memory is required; this is not the exact memory requirement of the CD-ROM software. The CD-ROM software itself uses some of the 640K RAM as does DOS. Rarely will the exact memory requirement of a CD-ROM software be readily accessible. Sales representatives usually will not know it and only experienced technical support staff may know. CD-ROM workstation/network managers should try to learn the exact memory requirement of their CD-ROM software. Knowing their memory requirement helps greatly in selecting the level of solution(s). Addressing memory shortfalls may involve considerable tinkering and patience and involve seemingly endless rebooting.