Embedded C Programming I (Ecprogrami)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Pdp11-40.Pdf
processor handbook digital equipment corporation Copyright© 1972, by Digital Equipment Corporation DEC, PDP, UNIBUS are registered trademarks of Digital Equipment Corporation. ii TABLE OF CONTENTS CHAPTER 1 INTRODUCTION 1·1 1.1 GENERAL ............................................. 1·1 1.2 GENERAL CHARACTERISTICS . 1·2 1.2.1 The UNIBUS ..... 1·2 1.2.2 Central Processor 1·3 1.2.3 Memories ........... 1·5 1.2.4 Floating Point ... 1·5 1.2.5 Memory Management .............................. .. 1·5 1.3 PERIPHERALS/OPTIONS ......................................... 1·5 1.3.1 1/0 Devices .......... .................................. 1·6 1.3.2 Storage Devices ...................................... .. 1·6 1.3.3 Bus Options .............................................. 1·6 1.4 SOFTWARE ..... .... ........................................... ............. 1·6 1.4.1 Paper Tape Software .......................................... 1·7 1.4.2 Disk Operating System Software ........................ 1·7 1.4.3 Higher Level Languages ................................... .. 1·7 1.5 NUMBER SYSTEMS ..................................... 1-7 CHAPTER 2 SYSTEM ARCHITECTURE. 2-1 2.1 SYSTEM DEFINITION .............. 2·1 2.2 UNIBUS ......................................... 2-1 2.2.1 Bidirectional Lines ...... 2-1 2.2.2 Master-Slave Relation .. 2-2 2.2.3 Interlocked Communication 2-2 2.3 CENTRAL PROCESSOR .......... 2-2 2.3.1 General Registers ... 2-3 2.3.2 Processor Status Word ....... 2-4 2.3.3 Stack Limit Register 2-5 2.4 EXTENDED INSTRUCTION SET & FLOATING POINT .. 2-5 2.5 CORE MEMORY . .... 2-6 2.6 AUTOMATIC PRIORITY INTERRUPTS .... 2-7 2.6.1 Using the Interrupts . 2-9 2.6.2 Interrupt Procedure 2-9 2.6.3 Interrupt Servicing ............ .. 2-10 2.7 PROCESSOR TRAPS ............ 2-10 2.7.1 Power Failure .............. -

Introduction to Embedded C
INTRODUCTION TO EMBEDDED C by Peter J. Vidler Introduction The aim of this course is to teach software development skills, using the C programming language. C is an old language, but one that is still widely used, especially in embedded systems, where it is valued as a high- level language that provides simple access to hardware. Learning C also helps us to learn general software development, as many of the newer languages have borrowed from its concepts and syntax in their design. Course Structure and Materials This document is intended to form the basis of a self-study course that provides a simple introduction to C as it is used in embedded systems. It introduces some of the key features of the C language, before moving on to some more advanced features such as pointers and memory allocation. Throughout this document we will also look at exercises of varying length and difficulty, which you should attempt before continuing. To help with this we will be using the free RapidiTTy® Lite IDE and targeting the TTE®32 microprocessor core, primarily using a cycle-accurate simulator. If you have access to an FPGA development board, such as the Altera® DE2-70, then you will be able to try your code out in hardware. In addition to this document, you may wish to use a textbook, such as “C in a Nutshell”. Note that these books — while useful and well written — will rarely cover C as it is used in embedded systems, and so will differ from this course in some areas. Copyright © 2010, TTE Systems Limited 1 Getting Started with RapidiTTy Lite RapidiTTy Lite is a professional IDE capable of assisting in the development of high- reliability embedded systems. -

Operating Systems What Is an Operating System Real-Time
Operating Systems Babak Kia Adjunct Professor Boston University College of Engineering Email: bkia -at- bu.edu ENG SC757 - Advanced Microprocessor Design What is an Operating System z Operating System handles • Memory Addressing & Management • Interrupt & Exception Handling • Process & Task Management • File System • Timing • Process Scheduling & Synchronization z Examples of Operating Systems • RTOS – Real-Time Operating System • Single-user, Single-task: example PalmOS • Single-user, Multi-task: MS Windows and MacOS • Multi-user, Multi-task: UNIX 2 Real-Time Operating Systems z Operating systems come in two flavors, real-time versus non real-time z The difference between the two is characterized by the consequences which result if functional correctness and timing parameters are not met in the case of real-time operating systems z Real-time operating systems themselves have two varieties, soft real-time systems and hard real- time systems z Examples of real-time systems: • Food processing • Engine Controls • Anti-lock breaking systems 3 1 Soft versus Hard Real-Time z In a soft real-time system, tasks are completed as fast as possible without having to be completed within a specified timeframe z In a hard real-time operating system however, not only must tasks be completed within the specified timeframe, but they must also be completed correctly 4 Foreground/Background Systems z The simplest forms of a non real-time operating systems are comprised of super-loops and are called foreground/background systems z Essentially this is an application -

Porting Musl to the M3 Microkernel TU Dresden
Porting Musl to the M3 microkernel TU Dresden Sherif Abdalazim, Nils Asmussen May 8, 2018 Contents 1 Abstract 2 2 Introduction 3 2.1 Background.............................. 3 2.2 M3................................... 4 3 Picking a C library 5 3.1 C libraries design factors . 5 3.2 Alternative C libraries . 5 4 Porting Musl 7 4.1 M3andMuslbuildsystems ..................... 7 4.1.1 Scons ............................. 7 4.1.2 GNUAutotools........................ 7 4.1.3 Integrating Autotools with Scons . 8 4.2 Repositoryconfiguration. 8 4.3 Compilation.............................. 8 4.4 Testing ................................ 9 4.4.1 Syscalls ............................ 9 5 Evaluation 10 5.1 PortingBusyboxcoreutils . 10 6 Conclusion 12 1 Chapter 1 Abstract Today’s processing workloads require the usage of heterogeneous multiproces- sors to utilize the benefits of specialized processors and accelerators. This has, in turn, motivated new Operating System (OS) designs to manage these het- erogeneous processors and accelerators systematically. M3 [9] is an OS following the microkernel approach. M3 uses a hardware/- software co-design to exploit the heterogeneous systems in a seamless and effi- cient form. It achieves that by abstracting the heterogeneity of the cores via a Data Transfer Unit (DTU). The DTU abstracts the heterogeneity of the cores and accelerators so that they can communicate systematically. I have been working to enhance the programming environment in M3 by porting a C library to M3. I have evaluated different C library implementations like the GNU C Library (glibc), Musl, and uClibc. I decided to port Musl as it has a relatively small code base with fewer configurations. It is simpler to port, and it started to gain more ground in embedded systems which are also a perfect match for M3 applications. -
Reentrant Code
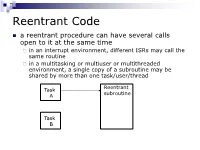
Reentrant Code a reentrant procedure can have several calls open to it at the same time in an interrupt environment, different ISRs may call the same routine in a multitasking or multiuser or multithreaded environment, a single copy of a subroutine may be shared by more than one task/user/thread Reentrant Task subroutine A Task B Reentrant Code Characteristics requirements: 1. any parameters or local variables must be on the stack frame 2. registers may be used for parameters and local variables but must be saved on or restored from the stack at beginning/end of the subroutine 3. guarantee that each call of the subroutine will create a separate stack frame to maintain data integrity 4. no self-modifying code Recursion recursive code must be reentrant recursive reentrant but reentrant recursive e.g. calculating 3! using recursion main move.w number,D0 pass the number jsr fact start recursive rtn move.w D0,result store the factorial stop #$2700 number dc.w 3 result ds.w 1 fact link A6,#-2 Stack structure move.w D0,-2(A6) subq.w #1,D0 bne push move.w -2(A6),D0 bra return push jsr fact mulu -2(A6),D0 return unlk A6 rts end main SP ->/////// A much more complex example: X: array [0..30] of words Y: longword Z, ALPHA, N: byte call order is S/R demo(X, Y, Z, ALPHA, N ) N is passed/returned by value, all others are passed by reference demo(X[w:31], Y[l], Z[b], ALPHA[b], N[b]) main CLR.W D2 zero entire word MOVE.B N,D2 N to low byte MOVE.W D2,-(SP) N on stack PEA ALPHA push arguments PEA Z in reverse order PEA Y PEA X JSR demo call -
Java Concurrency in Practice
Java Concurrency in practice Chapters: 1,2, 3 & 4 Bjørn Christian Sebak ([email protected]) Karianne Berg ([email protected]) INF329 – Spring 2007 Chapter 1 - Introduction Brief history of concurrency Before OS, a computer executed a single program from start to finnish But running a single program at a time is an inefficient use of computer hardware Therefore all modern OS run multiple programs (in seperate processes) Brief history of concurrency (2) Factors for running multiple processes: Resource utilization: While one program waits for I/O, why not let another program run and avoid wasting CPU cycles? Fairness: Multiple users/programs might have equal claim of the computers resources. Avoid having single large programs „hog“ the machine. Convenience: Often desirable to create smaller programs that perform a single task (and coordinate them), than to have one large program that do ALL the tasks What is a thread? A „lightweight process“ - each process can have many threads Threads allow multiple streams of program flow to coexits in a single process. While a thread share process-wide resources like memory and files with other threads, they all have their own program counter, stack and local variables Benefits of threads 1) Exploiting multiple processors 2) Simplicity of modeling 3) Simplified handling of asynchronous events 4) More responsive user interfaces Benefits of threads (2) Exploiting multiple processors The processor industry is currently focusing on increasing number of cores on a single CPU rather than increasing clock speed. Well-designed programs with multiple threads can execute simultaneously on multiple processors, increasing resource utilization. -
TASKING VX-Toolset for Tricore User Guide
TASKING VX-toolset for TriCore User Guide MA160-800 (v3.2) February 25, 2009 TASKING VX-toolset for TriCore User Guide Copyright © 2009 Altium Limited. All rights reserved.You are permitted to print this document provided that (1) the use of such is for personal use only and will not be copied or posted on any network computer or broadcast in any media, and (2) no modifications of the document is made. Unauthorized duplication, in whole or part, of this document by any means, mechanical or electronic, including translation into another language, except for brief excerpts in published reviews, is prohibited without the express written permission of Altium Limited. Unauthorized duplication of this work may also be prohibited by local statute. Violators may be subject to both criminal and civil penalties, including fines and/or imprisonment. Altium, TASKING, and their respective logos are trademarks or registered trademarks of Altium Limited or its subsidiaries. All other registered or unregistered trademarks referenced herein are the property of their respective owners and no trademark rights to the same are claimed. Table of Contents 1. C Language .................................................................................................................. 1 1.1. Data Types ......................................................................................................... 1 1.1.1. Bit Data Type ........................................................................................... 2 1.1.2. Fractional Types ....................................................................................... -

AN10381 Nesting of Interrupts in the LPC2000 Rev
AN10381 Nesting of interrupts in the LPC2000 Rev. 01 — 6 June 2005 Application note Document information Info Content Keywords nested, reentrant, interrupts, LPC2000 Abstract Details on reentrant interrupt handlers and code examples for the same is provided Philips Semiconductors AN10381 Nesting of interrupts in the LPC2000 Revision history Rev Date Description 01 20050606 Initial version Contact information For additional information, please visit: http://www.semiconductors.philips.com For sales office addresses, please send an email to: [email protected] © Koninklijke Philips Electronics N.V. 2005. All rights reserved. Application note Rev. 01 — 6 June 2005 2 of 14 Philips Semiconductors AN10381 Nesting of interrupts in the LPC2000 1. Introduction This application note provides code examples for effectively handling reentrant interrupt handlers in the LPC2000 devices. The following organization is been adopted for this application note. 1. Interrupt handling overview 2. Nesting of Interrupts 3. Code examples It is assumed for this application note, that the user is familiar with the ARM7TDMI-S architecture. Also, for code examples relating to simple interrupt handling using FIQ and IRQ, please refer to the AN10254_1 application note available online. All the code examples provided in this application note were built on the Keil MicroVision3 ARM compiler (an evaluation version of which is free for download at www.keil.com) 2. Interrupt handling overview 2.1 Interrupt levels in the ARM7 core The ARM7 processor supports two levels of interrupts: Interrupt Request (IRQ) and Fast Interrupt Request (FIQ). ARM recommends only one interrupt source to be classified as an FIQ. All other interrupt sources could be classified as IRQ’s and they could be programmed for reentrancy. -

PDF, Postscript(Tm) and HTML Form
T2 System Development Environment Creating custom Linux solutions (Compiled from r369) René Rebe Susanne Klaus T2 System Development Environment: Creating custom Linux solutions: (Compiled from r369) by René Rebe and Susanne Klaus Published (TBA) Copyright © 2002, 2003, 2004, 2005, 2006, 2007 René RebeSusanne Klaus This work is licensed under the Open Publication License, v1.0, including license option B: Distribution of the work or derivative of the work in any standard (paper) book form for commercial purposes is prohibited unless prior permission is obtained from the copyright holder. The latest version of the Open Publication License is presently available at ht- tp://www.opencontent.org/openpub/. Table of Contents Preface ....................................................................................................................x Audience ..........................................................................................................x How to Read this Book ...................................................................................... x Conventions Used in This Book ......................................................................... x Typographic Conventions .......................................................................... x Icons ........................................................................................................x Organization of This Book ................................................................................ xi This Book is Free ............................................................................................ -
Threads, IPC, and Synchronization CS 111 Operating Systems Peter Reiher
Operating System Principles: Threads, IPC, and Synchronization CS 111 Operating Systems Peter Reiher CS 111 Lecture 7 Fall 2016 Page 1 Outline • Threads • Interprocess communications • Synchronization – Critical sections – Asynchronous event completions CS 111 Lecture 7 Fall 2016 Page 2 Threads • Why not just processes? • What is a thread? • How does the operating system deal with threads? CS 111 Lecture 7 Fall 2016 Page 3 Why Not Just Processes? • Processes are very expensive – To create: they own resources – To dispatch: they have address spaces • Different processes are very distinct – They cannot share the same address space – They cannot (usually) share resources • Not all programs require strong separation – Multiple activities working cooperatively for a single goal CS 111 – Mutually trusting elements of a system Lecture 7 Fall 2016 Page 4 What Is a Thread? • Strictly a unit of execution/scheduling – Each thread has its own stack, PC, registers – But other resources are shared with other threads • Multiple threads can run in a process – They all share the same code and data space – They all have access to the same resources – This makes the cheaper to create and run • Sharing the CPU between multiple threads – User level threads (with voluntary yielding) CS 111 – Scheduled system threads (with preemption) Lecture 7 Fall 2016 Page 5 When Should You Use Processes? • To run multiple distinct programs • When creation/destruction are rare events • When running agents with distinct privileges • When there are limited interactions and shared resources • To prevent interference between executing interpreters • To firewall one from failures of the other CS 111 Lecture 7 Fall 2016 Page 6 When Should You Use Threads? • For parallel activities in a single program • When there is frequent creation and destruction • When all can run with same privileges • When they need to share resources • When they exchange many messages/signals • When you don’t need to protect them from each other CS 111 Lecture 7 Fall 2016 Page 7 Processes vs. -

4. Nios II Software Build Tools
4. Nios II Software Build Tools May 2011 NII52015-11.0.0 NII52015-11.0.0 This chapter describes the Nios® II Software Build Tools (SBT), a set of utilities and scripts that creates and builds embedded C/C++ application projects, user library projects, and board support packages (BSPs). The Nios II SBT supports a repeatable, scriptable, and archivable process for creating your software product. You can invoke the Nios II SBT through either of the following user interfaces: ■ The Eclipse™ GUI ■ The Nios II Command Shell The purpose of this chapter is to make you familiar with the internal functionality of the Nios II SBT, independent of the user interface employed. 1 Before reading this chapter, consider getting an introduction to the Nios II SBT by first reading one of the following chapters: ■ Getting Started with the Graphical User Interface chapter of the Nios II Software Developer’s Handbook ■ Getting Started from the Command Line chapter of the Nios II Software Developer’s Handbook This chapter contains the following sections: ■ “Road Map for the SBT” ■ “Makefiles” on page 4–3 ■ “Nios II Embedded Software Projects” on page 4–5 ■ “Common BSP Tasks” on page 4–8 ■ “Details of BSP Creation” on page 4–20 ■ “Tcl Scripts for BSP Settings” on page 4–27 ■ “Revising Your BSP” on page 4–30 ■ “Specifying BSP Defaults” on page 4–35 ■ “Device Drivers and Software Packages” on page 4–39 ■ “Boot Configurations for Altera Embedded Software” on page 4–40 ■ “Altera-Provided Embedded Development Tools” on page 4–42 ■ “Restrictions” on page 4–48 © 2011 Altera Corporation. -

Programming Embedded Systems, Second Edition with C and GNU Development Tools
Programming Embedded Systems Second Edition Programming Embedded Systems, Second Edition with C and GNU Development Tools Foreword If you mention the word embedded to most people, they'll assume you're talking about reporters in a war zone. Few dictionaries—including the canonical Oxford English Dictionary—link embedded to computer systems. Yet embedded systems underlie nearly all of the electronic devices used today, from cell phones to garage door openers to medical instruments. By now, it's nearly impossible to build anything electronic without adding at least a small microprocessor and associated software. Vendors produce some nine billion microprocessors every year. Perhaps 100 or 150 million of those go into PCs. That's only about one percent of the units shipped. The other 99 percent go into embedded systems; clearly, this stealth business represents the very fabric of our highly technological society. And use of these technologies will only increase. Solutions to looming environmental problems will surely rest on the smarter use of resources enabled by embedded systems. One only has to look at the network of 32-bit processors in Toyota's hybrid Prius to get a glimpse of the future. Page 1 Programming Embedded Systems Second Edition Though prognostications are difficult, it is absolutely clear that consumers will continue to demand ever- brainier products requiring more microprocessors and huge increases in the corresponding software. Estimates suggest that the firmware content of most products doubles every 10 to 24 months. While the demand for more code is increasing, our productivity rates creep up only slowly. So it's also clear that the industry will need more embedded systems people in order to meet the demand.