On Implementation of MPEG-2 Like Real-Time Parallel Media Applications on MDSP Soc Cradle Architecture
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

This Thesis Has Been Submitted in Fulfilment of the Requirements for a Postgraduate Degree (E.G
This thesis has been submitted in fulfilment of the requirements for a postgraduate degree (e.g. PhD, MPhil, DClinPsychol) at the University of Edinburgh. Please note the following terms and conditions of use: This work is protected by copyright and other intellectual property rights, which are retained by the thesis author, unless otherwise stated. A copy can be downloaded for personal non-commercial research or study, without prior permission or charge. This thesis cannot be reproduced or quoted extensively from without first obtaining permission in writing from the author. The content must not be changed in any way or sold commercially in any format or medium without the formal permission of the author. When referring to this work, full bibliographic details including the author, title, awarding institution and date of the thesis must be given. Towards the Development of Flexible, Reliable, Reconfigurable, and High- Performance Imaging Systems by Jalal Khalifat A thesis submitted in partial fulfilment of the requirements for the degree of DOCTOR OF PHILOSOPHY The University of Edinburgh May 2016 Declaration I hereby declare that this thesis was composed and originated entirely by myself except where explicitly stated in the text, and that this work has not been submitted for any other degree or professional qualifications. Jalal Khalifat May 2016 Edinburgh, U.K. I Acknowledgements All praises are due to Allah, the most gracious, the most merciful, after three and a half years of continuous work, this work comes to end and it is the moment that I have to thank all the people who have supported me throughout my PhD study and who have contributed to the completion of this thesis. -

Performance of Image and Video Processing with General-Purpose
Performance of Image and Video Processing with General-Purpose Processors and Media ISA Extensions y Parthasarathy Ranganathan , Sarita Adve , and Norman P. Jouppi Electrical and Computer Engineering y Western Research Laboratory Rice University Compaq Computer Corporation g fparthas,sarita @rice.edu [email protected] Abstract Media processing refers to the computing required for the creation, encoding/decoding, processing, display, and com- This paper aims to provide a quantitative understanding munication of digital multimedia information such as im- of the performance of image and video processing applica- ages, audio, video, and graphics. The last few years tions on general-purpose processors, without and with me- have seen significant advances in this area, but the true dia ISA extensions. We use detailed simulation of 12 bench- promise of media processing will be seen only when ap- marks to study the effectiveness of current architectural fea- plications such as collaborative teleconferencing, distance tures and identify future challenges for these workloads. learning, and high-quality media-rich content channels ap- Our results show that conventional techniques in current pear in ubiquitously available commodity systems. Fur- processors to enhance instruction-level parallelism (ILP) ther out, advanced human-computer interfaces, telepres- provide a factor of 2.3X to 4.2X performance improve- ence, and immersive and interactive virtual environments ment. The Sun VIS media ISA extensions provide an ad- hold even greater promise. ditional 1.1X to 4.2X performance improvement. The ILP One obstacle in achieving this promise is the high com- features and media ISA extensions significantly reduce the putational demands imposed by these applications. -

XOS Advanced Media Processor
XOS Advanced Media Processor The XOS Advanced Media Processor is a high performance live media processor for broadcast and streaming applications. Key Business Benefits Application versatility The XOS Advanced Media Processor is the latest generation of Harmonic software-based video appliances. XOS can be used for either broadcast or streaming applications, and is adapted to multiple deployment environments. Classic infrastructures are supported with SDI, ASI, and satellite RF interfaces. Full-IP architectures are also supported: XOS handles MPEG compressed formats, as well as the latest SMPTE ST 2022-6 and SMPTE ST 2110 standards. GRAPHICS TRANSCODE STATMUX MULTIPLEXING ENCRYPT SDI TS over IP PACKAGING SAT RECEPTION OTT INGEST DECRYPT 2022-6 BROADCAST 2110 DVB-S2X XOS HLS STREAMING XOS Advanced Media Processor Inputs and Functionality XOS is packed with features to address any kind of video processing application. In addition to its market-leading compression engine, XOS integrates a broad range of audio codecs, including Dolby AC-4, an advanced video pre-processing engine, a broadcast multiplexer with statmux support, and a state-of-the-art packager for streaming applications. From decoding to encoding, from HDR processing to audio loudness management, Harmonic has you covered. Improved cost of ownership XOS Advanced Media Processor’s unparalleled function integration and performance dramatically reduce the number of appliances required for a given application, significantly improving your cost of ownership. As a software solution, XOS -

A Media Enhanced Vector Architecture for Embedded Memory Systems
A Media-Enhanced Vector Architecture for Embedded Memory Systems Christoforos Kozyrakis Report No. UCB/CSD-99-1059 July 1999 Computer Science Division (EECS) University of California Berkeley, California 94720 A Media-Enhanced Vector Architecture for Embedded Memory Systems by Christoforos Kozyrakis Research Project Submitted to the Department of Electrical Engineering and Computer Sciences, Uni- versity of California at Berkeley, in partial satisfaction of the requirements for the degree of Master of Science, Plan II. Approval for the Report and Comprehensive Examination: Committee: Professor David A. Patterson Research Advisor (Date) ******* Professor Katherine Yelick Second Reader (Date) A Media-Enhanced Vector Architecture for Embedded Memory Systems Christoforos Kozyrakis M.S. Report Abstract Next generation portable devices will require processors with both low energy consump- tion and high performance for media functions. At the same time, modern CMOS technology creates the need for highly scalable VLSI architectures. Conventional processor architec- tures fail to meet these requirements. This paper presents the architecture of Vector IRAM (VIRAM), a processor that combines vector processing with embedded DRAM technology. Vector processing achieves high multimedia performance with simple hardware, while em- bedded DRAM provides high memory bandwidth at low energy consumption. VIRAM pro- vides ¯exible support for media data types, short vectors, and DSP features. The vector pipeline is enhanced to hide DRAM latency without using caches. The peak performance is 3.2 GFLOPS (single precision) and maximum memory bandwidth is 25.6 GBytes/s. With a target power consumption of 2 Watts for the vector pipeline and the memory system, VIRAM supports 1.6 GFLOPS/Watt. For a set of representative media kernels, VIRAM sustains on average 88% of its peak performance, outperforming conventional SIMD media extensions and DSP processors by factors of 4.5 to 17. -

Scalable Vector Media-Processors for Embedded Systems
Scalable Vector Media-processors for Embedded Systems Christoforos Kozyrakis Report No. UCB/CSD-02-1183 May 2002 Computer Science Division (EECS) University of California Berkeley, California 94720 Scalable Vector Media-processors for Embedded Systems by Christoforos Kozyrakis Grad. (University of Crete, Greece) 1996 M.S. (University of California at Berkeley) 1999 A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Computer Science in the GRADUATE DIVISION of the UNIVERSITY of CALIFORNIA at BERKELEY Committee in charge: Professor David A. Patterson, Chair Professor Katherine Yelick Professor John Chuang Spring 2002 Scalable Vector Media-processors for Embedded Systems Copyright Spring 2002 by Christoforos Kozyrakis Abstract Scalable Vector Media-processors for Embedded Systems by Christoforos Kozyrakis Doctor of Philosophy in Computer Science University of California at Berkeley Professor David A. Patterson, Chair Over the past twenty years, processor designers have concentrated on superscalar and VLIW architectures that exploit the instruction-level parallelism (ILP) available in engineering applications for workstation systems. Recently, however, the focus in computing has shifted from engineering to multimedia applications and from workstations to embedded systems. In this new computing environment, the performance, energy consumption, and development cost of ILP processors renders them ineffective despite their theoretical generality. This thesis focuses on the development of efficient architectures for embedded multimedia systems. We argue that it is possible to design processors that deliver high performance, have low energy consumption, and are simple to implement. The basis for the argument is the ability of vector architectures to exploit efficiently the data-level parallelism in multimedia applications. -
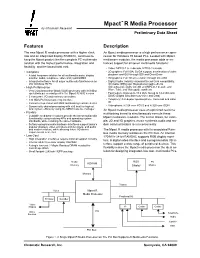
Mpact R Media Processor
Mpact TM R Media Processor by Chromatic Research Preliminary Data Sheet Features Description The new Mpact R media processor with a higher clock An Mpact media processor is a high performance copro- rate and an integrated display RAMDAC, continues to cessor for Windows 95 based PCs. Loaded with Mpact keep the Mpact product line the complete PC multimedia mediaware modules, the media processor adds or en- solution with the highest performance, integration and hances support for all seven multimedia functions: flexibility, and the lowest total cost. • Video: MPEG-1 & -2 decode, MPEG-1 encode • Complete • 2D graphics: Full VGA, SVGA support, acceleration of video • A total hardware solution for all multimedia ports: display playback and GUI through GDI and DirectDraw monitor, audio, telephone, video and joystick/MIDI • 3D graphics: Full 3D acceleration through Direct3D • Integrated software for all major multimedia functions on an • Digital Audio: Industry-standard Sound Card compatibility, x86 Windows 95 PC 3D Audio (SRS) and 3D positional audio effects • High Performance (DirectSound), Dolby AC-3Ô and MPEG-1 decode and • Very Long Instruction Word (VLIW) processor with 3.6 billion Wave Table and Waveguide synthesis operations per second peak in the Mpact R/3600 version • Fax/modem: Data up to 33.6 kb/s, fax up to 14.4 kb/s and • 5 concurrent I/O and memory controllers DSVD (Digital Simultaneous Voice and Data) • 132 MB/s PCI bus mastering interface • Telephony: Full-duplex speakerphone, Voicemail and caller • Concurrent operation with MRK multitasking real-time kernel ID • Dynamically shared processing with x86 host for highest • Videophone: H.324 over POTS and H.320 over ISDN total system efficiency using the MRM resource manager An Mpact media processor uses an optimized real-time • Flexible multitasking kernel to simultaneously execute these • Loadable mediaware modules provide the latest multimedia functionality using evolving APIs and operating system Mpact mediaware modules. -
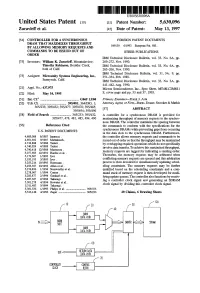
Controller for a Synchronous DRAM That Maximizes Throughput by Allowing Memory
TIIIIIHINII US005630096A United States Patent [191 [11] Patent Number: 5 ,630,096 Zuravletf et al. [45] Date of Patent: May 13,1997 [54] CONTROLLER FOR A SYNCHRONOUS FOREIGN PATENT DOCUMENTS DRAM THAT MAXIMIZES THROUGHPUT BY ALLOWING MEMORY REQUESTS AND 549139 6/1993 European Pat. Off. COMMANDS TO BE ISSUED OUT OF OTHER PUBLICATIONS ORDER IBM Technical Disclosure Bulletin, vol. 33, No. 6A, pp. [75] Inventors: William K. Zuravlelf, Mountajnview; 269-272, Nov. 1990. Timothy RObillSOll, BOuld6I Creek, IBM Technical Disclosure Bulletin, vol. 33, No. 6A, pp. both of Calif. 265-266, Nov. 1990. _ _ _ _ IBM Technical Disclosure Bulletin, vol. 31, No. 9, pp. [73] Assrgnee: Microunity Systems Engineering, Inc., 351454, Feb 1989 Sunnyvale’ Cahf' IBM Technical Disclosure Bulletin, vol. 33, No. 3A, pp. 441-442, Aug. 1990. [21] APPI' NO‘: 43737 5 Micron Semiconductor, Inc., Spec Sheet. MT48LC2M8S1 [22] Filed: May 10’ 1995 S, cover page and pp. 33 and 37, 1993. [5 1] Int. Cl.6 . .. G06F 13/00 Primary Examiner—Frank J . Asta [52] US. Cl. ................................... .. 395/481; 364/DIG. 1; A?vmey, Agent vrFim1—B11n1S,D0ane,Sw¢cker & Mathis 365/233; 395/432; 395/477; 395/478; 395/485; 395/494; 395/496 [57] ABSTRACT [58] Field of Search ........................... .. 365/233; 395/432, A controller for a synchronous DRAM is provided for 395/477, 478, 481, 485, 494, 496 maximizing throughput of memory requests to the synchro . nous DRAM. The controller maintains the spacing between ~ [56] References cued the cormnands to conform with the speci?cations for the 5TB CU} [E synchronous DRAMs while preventing gaps from occurring U'S' P NT DO NTS in the data slots to the synchronous DRAM. -
The Rise of Embedded Media Processing White Paper
The Rise of Embedded Media Processing www.analog.com/processors The Rise of Embedded Media Processing An Inflection Point in Technology Causes a Fundamental Shift in the Application of Semiconductors Despite the economic downturn of the last three years, the semiconductor industry is expected to return to the healthy growth rates that it has enjoyed since the mid-1970s. But what will be the growth drivers and enabling technologies that will move the industry forward? The growth driver in the 1980s was the PC. In the 1990s, cellphones, high speed modems, and the Internet all fundamentally changed the way people transact business, interact with one another, and entertain themselves. Companies that provided the key products and technologies for these changes have become household names—Intel®, Microsoft®, Motorola, Nokia, Ericsson, and Cisco. Analog Devices, Inc. (ADI) has detected the emergence of a subtle yet fundamental shift in our industry triggered by a confluence of factors that together strongly favor growth in the use of embedded processors. The emerging market for high speed, multimedia products of all descriptions is fueling a shift in the application of semiconductors, as many of these products benefit from Internet connectivity and extraordinary digital signal processing performance. Another factor is the continuing progress in semiconductor process technology, which improves performance and reduces chip cost, but now also dramatically increases the cost of IC design. Microprocessor architectural innovation now allows the hardware and software aspects of microcon- trollers, digital signal processing, and media processors to be tightly integrated. These factors define a new market context, one in which there is a clear demand for embedded signal process- ing that is flexible, low cost, and easy for OEMs to implement into media-rich wired and wireless applications. -

Davinci Technology Overview Brochure
DaVinci™ Technology Overview CONTENTS www.thedavincieffect.com Overview . .1 Silicon and Tools . .4 Training and Resources . .9 September 2008 Select Customer Products . .13 DaVinci™ Processors: Tuned for Digital Video End Equipments DaVinci™ Technology Overview DaVinci technology is a signal processing-based solution tailored for digital video applications DaVinci Capture/ that provides video equipment manufacturers with integrated processors, software, tools and Processor CPU MHz Display support to simplify the design process and accelerate innovation. DM335* ARM926 135, 216, 270 Capture/Display DM355* ARM926** 135, 216, 270 Capture/Display DaVinci Processors Reduce System Cost The portfolio of DaVinci processors consists of scalable, programmable signal processing system on DM6467 C64x+™/ARM926† 594/297 Capture/Display chips (SoCs), accelerators and peripherals, optimized to match the price, performance and feature re - DM648 C64x+ 720, 900 Capture/Display quirements for a broad spectrum of video end equipments. The DaVinci technology portfolio includes: Silicon Overview DM647 C64x+ 720, 900 Capture/Display • TMS320DM644x digital media processors – Highly integrated SoCs based on an ARM926 DM6446* C64x+/ARM926 600/300 Capture/Display processor and the TMS320C64x+™ DSP core. The TMS320DM6446, TMS320DM6443 and DM6443 C64x+/ARM926 600/300 Display TMS320DM6441 processors are ideal for applications and end equipments such as video phones, DM6441* C64x+/ARM926 512/256 Capture/Display automotive infotainment and IP set-top boxes (STB). DM6437 C64x+ 400, 500, 600 Capture/Display • TMS320DM643x digital media processors – Based on the C64x+™ DSP core, the TMS320DM6437, DM6435 C64x+ 400, 500, 600 Capture TMS320DM6435, TMS320DM6433 and TMS320DM6431 processors are ideal for cost-sensitive DM6433 C64x+ 400, 500, 600 Display applications and include special features that make them suitable for automotive market applica- tions such as lane departure and collision avoidance, as well as machine-vision systems, robotics DM6431 C64x+ 300 Capture and video security. -

The Harmonic Electra® X2S Advanced Media Processor Converges the Essen Ial Components of a Video Headend Onto a Cost-E Fec Ive 1-RU Platform
ADVANCED MEDIA PROCESSOR The Harmonic Electra® X2S advanced media processor converges the essenial components of a video headend onto a cost-efecive 1-RU platform. Featuring integrated real-ime encoding, network management, muliplexing, and high-quality graphics and branding, Electra X2S ofers broadcasters, pay-TV operators and content providers market-leading video quality, unparalleled funcion integraion and increased operaional lexibility. At the heart of Electra X2S is the Harmonic PURE Compression Engine™, an advanced encoding technology that supports SD and HD formats, and MPEG-2, MPEG-4 AVC and HEVC codecs for broadcast and OTT muliscreen delivery. The Harmonic PURE Compression Engine powers Electra X2S with superior video quality at minimum bandwidth. Users can also employ EyeQ™ real-ime video opimizaion, Harmonic’s opional enhancement for PURE Compression that ensures delivery of the highest video quality across IPTV or OTT delivery networks while reducing bandwidth consumpion by up to 50%. Harmonic’s industry-leading funcion integraion achieves its highest level in Electra X2S. Staisical muliplexing capabiliies previously available only on Harmonic ProStream® stream processors, and management funcionality from the Harmonic NMX™ Digital Service Manager™ come standard. The addiion of on-board video graphics and branding bring new levels of worklow eiciency to the video delivery chain, a capability that also preserves video quality by removing the need to inject baseband components into the IP worklow. Rich audio funcionality includes encoding of Dolby® Digital Plus (E-AC-3) content and integrated audio leveling. Reducing the number of discrete boxes in the broadcast chain reduces network complexity, resuling in an operaion that is easier to set up, manage and maintain. -

Nexperia PNX1500 Connected Media Processor
查询PNX1500供应商 捷多邦,专业PCB打样工厂,24小时加急出货 Nexperia PNX1500 Connected media processor Exceptional performance, high integration, and support for a broad range of media formats make the Philips Nexperia PNX1500 the media processor of choice for powering the next generation of connected, multimedia consumer devices. Semiconductors Building on a tradition of high-performance, low-cost, real-time media processors, the Nexperia PNX1500 handles more formats of video, audio, graphics, and communications datastreams than previous Nexperia media processors. It includes a completely redesigned TriMedia CPU core and offers compatibility with all leading video standards, including MPEG-2, MPEG-4, DV, RealNetworks®, and DivX-5. The PNX1500 also integrates a TFT LCD controller and an Ethernet 10/100 MAC, reducing external components and supporting advanced product configurations. Real-time multimedia processing, extensive connectivity options, and support for dynamic power management make PNX1500 an ideal single- chip solution for an increasing variety of standalone and networked Key features multimedia products—from personal video recorders, to connected ! Connected media processor for streaming multimedia applications: DVD players, wireless LAN devices, IP set-top boxes, advanced home audio, video, graphics, and communications gateways, smart display pads, videoconferencing devices, and more. It ! Innovative 32-bit TriMedia™ CPU with powerful multimedia and handles popular multimedia algorithms and standard communication floating point instructions protocols in real time, including encode/decode of MPEG-2 or MPEG-4 ! On-chip, independent, DMA-driven I/O and coprocessing units (SP,MVP), MPEG-4 ASP decode, DV decode, H.263 encode/decode, ! Video output up to W-XGA TFT LCD (1280 x 768 60 Hz) and DivX-5 decode, MP3 encode/decode, AAC encode/decode,TCP/IP, up to HD video (1920 x 1080 60I) Ethernet, and Universal PnP. -
Efficient Applications and Architecture of Modern Digital Signal Processors
JET Volume 10 (2017) p.p. 35-50 Issue 2, June 2017 Type of article 1.02 www.fe.um.si/en/jet.html EFFICIENT APPLICATIONS AND ARCHITECTURE OF MODERN DIGITAL SIGNAL PROCESSORS UČINKOVITE APLIKACIJE IN ARHITEKTURE MODERNIH DIGITALNIH SIGNALNIH PROCESORJEV Ivana Hartmann TolićR, Snježana Rimac-Drlje1, Željko Hocenski1 Keywords: digital signal processor, parallel processing, Harvard processor architecture, evaluation model Abstract Digital signal processors have found their roles in various fields of science and technology. With the appearance of problems related to the processing of large quantities of data in real time, it was nec- essary to develop a system that would execute procedures very rapidly and at low cost. The most common application in real time is the digitization and mathematical processing of audio, video, tem- perature, and voltage data, etc., resolved using parallel operations. Various producers of digital signal processors have developed processors and evaluation models that enable developers to quickly and efficiently create unique applications in communications and visual systems, biomedicine, meteorol- ogy, etc. In this article, the basic performance and architecture of the modern digital signal processor are described in detail with emphasis on the most common applications. A practical example of the use of a digital signal processor for numerical integration is presented. A comparison with commonly used processors is performed to confirm its efficiency.. R Corresponding author: Ivana Hartmann Tolić, J. J. Strossmayer University in Osijek, Faculty of Electrical Engineering, Com- puter Science and Information Technology in Osijek, Kneza Trpimira 2b, Osijek, Croatia, Tel: +385 31 495 416, e-mail address: [email protected] 1 J.