Electrical Power and Storage for NASA Next Generation Aircraft
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Metis Design Corporation (MDC)
40 kW Turbo-Alternator Hybrid-Electric Range Extender AHS Transformative Vertical Flight Concepts Workshop Rory Keogh, Ph.D. Lead Propulsion Engineer August 2015 structural health monitoring multi-functional materials lean enterprise solutions 1501 Mariposa St • San Francisco, CA 94107 • 415.572.1843 • http://www.metisdesign.com Metis Design Corporation (MDC) Overview • Introduction to Metis Design • Project Background • Technology Overview – Turbomachinery and generator – Waste heat recovery (recuperation) – Performance metrics and scalability – Noise • Summary © 2015 Metis Design Corporation Microturbine Range Extender 2 of 32 Metis Design Corporation (MDC) • Offer novel multi-disciplinary defense, aerospace & energy solutions • Diverse engineering staff solid fundamental principles (10/14 staff hold Ph.D.’s) hands-on experience from 42 SBIR/BAA contracts over 12 years Boston MA headquarters & satellite offices in CA & NM • MDC has invented multiple disruptive technologies Microturbine range extender Carbon nanotube (CNT) de-icing & anti-icing system for composite wings Distributed SHM/HUMS sensor digital infrastructure © 2015 Metis Design Corporation Microturbine Range Extender 3 of 32 Background Projects Micro-Turbofan for small scale high performance aircraft Turbo-generator to flight test sub-scale electric aircraft Microturbine battery electric vehicle range extender Microturbine for residential combined heat and power © 2015 Metis Design Corporation Microturbine Range Extender 4 of 32 Metis Design Corporation (MDC) • Rory Keogh Joined Metis Design in 2010 to lead DARPA funded jet engine project B.E. Mech. from NUI Galway, M.S. & Ph.D. from MIT Dept. of Aero and Astronautics 5 years experience at Boeing (Mechanical Systems) and 6 years management consulting • Greg Thomas Joined Metis Design in 2010 to work on DARPA funded jet engine project M.Eng. -
Arrangement for Cooling a Turbo Generator and a Method Therefore
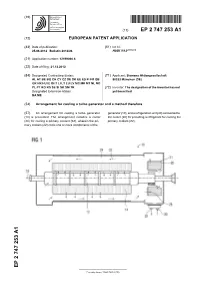
(19) TZZ ¥_T (11) EP 2 747 253 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51) Int Cl.: 25.06.2014 Bulletin 2014/26 H02K 9/12 (2006.01) (21) Application number: 12199000.6 (22) Date of filing: 21.12.2012 (84) Designated Contracting States: (71) Applicant: Siemens Aktiengesellschaft AL AT BE BG CH CY CZ DE DK EE ES FI FR GB 80333 München (DE) GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR (72) Inventor: The designation of the inventor has not Designated Extension States: yet been filed BA ME (54) Arrangement for cooling a turbo generator and a method therefore (57) An arrangement for cooling a turbo generator generator (10), and a refrigeration unit (40) connected to (10) is presented. The arrangement includes a cooler the cooler (20) for providing a refrigerant for cooling the (20) for cooling a primary coolant (22), wherein the pri- primary coolant (22). mary coolant (22) cools one or more components of the EP 2 747 253 A1 Printed by Jouve, 75001 PARIS (FR) 1 EP 2 747 253 A1 2 Description [0011] In another embodiment, the refrigerant is R- 717. R-717 can be liquefied easily by compression or [0001] The present invention relates to a turbo gener- cooling and when returned to its gaseous state, it absorbs ator and more particularly to an arrangement for cooling large amounts of heat from its surroundings, thereby re- a turbo generator. 5 ducing the temperature of the primary coolant. -
ALTERNATORS ➣ Armature Windings ➣ Wye and Delta Connections ➣ Distribution Or Breadth Factor Or Winding Factor Or Spread Factor ➣ Equation of Induced E.M.F
CHAPTER37 Learning Objectives ➣ Basic Principle ➣ Stationary Armature ➣ Rotor ALTERNATORS ➣ Armature Windings ➣ Wye and Delta Connections ➣ Distribution or Breadth Factor or Winding Factor or Spread Factor ➣ Equation of Induced E.M.F. ➣ Factors Affecting Alternator Size ➣ Alternator on Load ➣ Synchronous Reactance ➣ Vector Diagrams of Loaded Alternator ➣ Voltage Regulation ➣ Rothert's M.M.F. or Ampere-turn Method ➣ Zero Power Factor Method or Potier Method ➣ Operation of Salient Pole Synchronous Machine ➣ Power Developed by a Synchonous Generator ➣ Parallel Operation of Alternators ➣ Synchronizing of Alternators ➣ Alternators Connected to Infinite Bus-bars ➣ Synchronizing Torque Tsy ➣ Alternative Expression for Ç Alternator Synchronizing Power ➣ Effect of Unequal Voltages ➣ Distribution of Load ➣ Maximum Power Output ➣ Questions and Answers on Alternators 1402 Electrical Technology 37.1. Basic Principle A.C. generators or alternators (as they are DC generator usually called) operate on the same fundamental principles of electromagnetic induction as d.c. generators. They also consist of an armature winding and a magnetic field. But there is one important difference between the two. Whereas in d.c. generators, the armature rotates and the field system is stationary, the arrangement Single split ring commutator in alternators is just the reverse of it. In their case, standard construction consists of armature winding mounted on a stationary element called stator and field windings on a rotating element called rotor. The details of construction are shown in Fig. 37.1. Fig. 37.1 The stator consists of a cast-iron frame, which supports the armature core, having slots on its inner periphery for housing the armature conductors. The rotor is like a flywheel having alternate N and S poles fixed to its outer rim. -

RF DEMO Ceramic Helium Cooled Blanket, Coolant and Energy
JAERI-Conf 2004-012 JP0450748 2.2 R DEMO Ceramic Helium Cooled Blanket, Coolant and Energy Transformation Systems V.Kovalenkoa,*, A.Bon'sov b, V.Demidov', VKapyshev', A.Leshukova, V.Poliksha' A popova, G.ShataloVb, Yu.Strebkov' aFederal State Unitary Enterprise "Dollezhal Research and Development Institute of Power Engineering" PO Box 788, Moscow 101000, Russian Federation bRussian Research Center "Kurchatov Institute", Kurchatov Square 1, 123182 Moscow, Russian Federation Tederal State Unitary Enterprise "A.A.Bochvar All-Russia Research Institute of Inorganic Materials", P.O. Box 369, Moscow 123060, Russian Federation *Corresponding author.Tel.: 7-95-2689243; fax: 7-95-9752019. E-mail address: kovalentek.ru Abstract RF DEMO-S reactor is a prototype of commercial fusion reactors for further generation. A blanket is the main element uit of the reactor design. The segment structure is the basis of the ceramic blanket. The segments mounting/dismounting operations are carried out through the vacuum vessel vertical port. The inboard/outboard blanket segment is the modules welded design, which are welded by back plate. The module contains the back plate, the first wall, lateral walls and breeding zone. The 9CrMoVNb steel is used as structural material. The module internal space formed by the first wall, lateral walls and back plate is used for breeding zone arrangement. The breeding zone design based upon the poloidal BIT (Breeder Inside Tube) concept. The beryllium is used as multi lier material and the lithium orthosilicate is used as breeder material. The helium at 0. 1 MPa is used as purge gas. The cooling is provided by helium at 10 MPa. -

Historical Loss Experiences in the Global Power Industry August 2014 Contents
MARSH RISK MANAGEMENT RESEARCH HISTORICAL LOSS EXPERIENCES IN THE GLOBAL POWER INDUSTRY AUGUST 2014 CONTENTS 1 INTRODUCTION 2 PART ONE: PRINCIPLES OF GENERATING ELECTRICITY 8 PART TWO: HISTORICAL LOSSES 48 CONCLUSION HISTORICAL LOSS EXPERIENCES IN THE GLOBAL POWER INDUSTRY ii marsh.com MARSH RISK MANAGEMENT RESEARCH INTRODUCTION At Marsh, our claims management and power industry experience enables us to present an accurate description of the types of events that commonly lead to insurance claims. To compile this study, we used data and an analysis of global trends that many power clients will already be acquainted with. The purpose of this document is to provide commentary on the world of power generation, the risks affecting that industry, and the importance of effective risk management in preventing or mitigating these risks. The report is divided into two parts: ȫ Part one provides a brief overview of some of the key technologies being used in power generation, including details of some areas that are either emergent or in the research-and-development stage at the time of writing. ȫ Part two features a narrative description of some of the historical loss experiences that have affected the power generation industry in recent years. It may be helpful to review this document along with the following recent Marsh Risk Management Research briefings on power generation: ȫ The Impact of Large Losses in the Global Power Industry. ȫ Common Causes of Large Losses in the Global Power Industry. We trust that you will find this document both illuminating and helpful as you consider the risks your own organization faces. -

Bernard A. Behrend Collection Mss.0240
Bernard A. Behrend Collection Mss.0240 Clemson University Libraries Special Collections Bernard A. Behrend Collection Mss.0240 TABLE OF CONTENTS SUMMARY INFORMATION Summary Information Repository Clemson University Libraries Special Collections Biographical Note Creator - Scope and Content Note Behrend, B.A., (Bernhard Arthur), 1875- Administrative Information Title Related Materials Bernard A. Behrend Collection Controlled Access Headings ID Related/Analytical Title Mss.0240 Collection Inventory Date [bulk] General Files Bulk, 1890-1932 Information File Index Date [inclusive] Photographic Images 1830-1982 Oversize Materials Extent 28.29 cubic feet (52 boxes, oversize folders, 10 boxes Artifacts and 1 oversize folder of photographs, and 25 artifacts) Language English Abstract This collection consists of the personal papers of Bernard Arthur Behrend. They document his long career as an electrical engineer, inventor, scholar, and author, and include material relating to his book, The Induction Motor. In addition, the collection includes material on subjects in which he had an interest as a scholar and hobbyist. There is correspondence with Margaret Chase Behrend, Behrend's widow and the donor of the Collection, the author Julia Peterkin, and with Clemson College officials. The Bernard A. Behrend Collection reflects the world of science and electrical engineering from the period of the late nineteenth century to the early twentieth century. file:///C/Users/jredd/Desktop/Mss0240Behrend.html[4/19/2019 1:45:55 PM] Bernard A. Behrend Collection Mss.0240 Return to Table of Contents » BIOGRAPHICAL NOTE Bernard Arthur Behrend was born on May 25, 1875, in Villeneuve, Switzerland, the youngest of seven surviving children, to Moritz and Rebecca (Wolf) Behrend. -

Wrap-Up of Industrial Power Generation, Turbines I GEOS 24705/ ENST 24705
Wrap-up of industrial power generation, Turbines I GEOS 24705/ ENST 24705 Copyright E. Moyer 2011 Tesla’s AC is “three-phase” 3-phase generation animation http://www.launc.tased.edu.au/online/sciences/physics/ 3phase/threeph.htm Generators are virtually unchanged in 100 yrs Stator, 3-phase generator, Wellluck Co., Stator, 3-phase generator, Brakpan, South China, 12.5 MW, 2010 Africa, 1897. Photo: Siemens Industrial generation design specs • Generator should be large for heat dissipaon • Voltage much higher than 110 V to minimize resis3ve heang • Many loops to increase voltage and power output • No sliding mechanisms that carry big current: current carried in stator • Magnet in stator, use electromagnet for bigger B-field • Mul3ple poles if needed for higher frequencies Rotor carries electromagnet Old mill rotor (source unknown) Small Hydro Generator rotor - Rotor Assembly Area - Alstom Hydro Manufacturing site in Galindo (Spain) copyright © 2010 M. Monteaux for Alstom Turbo-generator power grew very quickly (though seems to be leveling of) * Requires growth not just in generators but in prime movers that power them * exponential growth in several stages * topping-out of steam P and T ca. 1960 From Vaclav Smil, “Energy at the Crossroads” First major hydropower station, Niagara Falls, 1895 Adams power station, 10 5MW AC generators. Photo: Tesla Society Hoover Dam hydropower station, upgraded 1961 17 generators, average 120 MW. Photo: source unknown The prime movers driving the world’s electricity supply Invented by Parsons, 1884. 80% of world’s electricity today (all external combus3on). Power growth rapid: first turbine 75 kW (1890), by 1912 turbo-generator system installed in Chicago (at Fisk!) was 25 MW, -> 50 MW in Parson’s life3me, > 1 GW now Efficiency gain rapid: More efficient than reciprocang engines, also simpler – fewer moving parts. -

Production of the World's Largest and Higher Efficiency 600MW Class
Production of the World’s Largest and Higher Efficiency 600MW Class Indirectly Hydrogen-Cooled Turbo-generator D. Murata, M. Kakiuchi, H.Ito Toshiba Corporation, Japan Abstract Large-scale electricity generation has to comply with increasingly stringent environmental and economic boundary conditions. That is the reason why the authors are developing generators with higher efficiency and larger capacity. Their new concept has an indirectly hydrogen-cooled stator coil to replace installations in which directly water-cooling has been inevitable up to now. The newly developed generator saves space and reduces complexity. The design eliminates the typical risk of water-cooled generators such as clogging of the stator coil cooling path and water leaks. Further, the indirectly hydrogen-cooled stator coil does not require a cooling path area in the cross section, which potentially results in a higher efficiency. The authors have developed the HTC (High Thermal Conductivity) insulation for the stator coil, and applied this to indirectly hydrogen-cooled generators since 2000. In 2009, the authors developed and manufactured a 2P-60Hz-670MVA generator, which is the world’s largest capacity as indirectly hydrogen-cooled generator, and have achieved a generator efficiency of over 99.1%. Hydrogen gas has less cooling ability than water. In order to enable adoption of indirectly hydrogen-cooling method to a 2P-60Hz-670MVA generator, , the technical challenges have been investigated and solved. Examples are the balancing between terminal voltage and stator current, optimization of stator and rotor cooling, verification of stator frame, hydrogen gas sealing, and stator coil end-support structure. The developed generators were tested according to the standard at the factory in January 2009. -

Nordic Nuclear Power Generator Stator Vibrations
Nordic Nuclear Power Generator Stator Vibrations Energiforsk seminar 2019, Espoo Kent Engvall, Gabor Csaba Fortum Turbine and Generator Services Foreword and acknowledgment • This paper is generally focused on vibrations in turbo generator stators in the Nordic nuclear power plants in Ringhals, Forsmark, Oskarshamn and Olkiluoto. The purpose of the project is to provide a background and basic knowledge of the generator stator structure, design requirements and various vibration conditions. • Authors are Kent Engvall senior consultant and Gabor Csaba, Generator Product Line Owner at Fortum Turbine and Generator Services. • The study has been carried out within the Energiforsk Vibrations in nuclear applications research program. The stakeholders of the program are Vattenfall, Uniper, Fortum, TVO, Skellefteå Kraft and Karlstads Energi. 2 Kent Engvall, Gabor Csaba Energiforsk seminar 2019 – Nordic Nuclear Power Generator Stator Vibrations Outline - Main Components and Functional Requirements - Excitation and Dynamics - Problems/Failures Caused by Vibrations in Stators - Study of 4-pole Generator Stators - Study of 2-pole Generator Stators - Methods to avoid/mitigate “unhealthy” vibrations - Experiences from other plants 3 Kent Engvall, Gabor Csaba Energiforsk seminar 2019 – Nordic Nuclear Power Generator Stator Vibrations The Turbo Generator´s Main Components and Functional Requirements Stator winding Coupling • Generator main purpose: to transfer mechanical Stator core to turbine energy from turbine to electrical energy. • When the rotor winding feed with direct current, the rotor transfers the mechanical power of the turbine to a rotating magnetic field. • The stator core closes the magnetic field from the rotor. • Stator winding transfer magnetic flux to electrical energy that is lead to the electrical grid via terminals, bus bars, breaker and the transformer. -
Turbo Generators
TURBO GENERATORS BEST QUALITY FOR THERMAL POWER PLANTS 1 2 Turbo generators with top modern standards International technology group ANDRITZ is a globally for turbo generators” (CoC) and all other research leading supplier of plants, equipment, and services facilities of ANDRITZ guarantee the utilization of for hydropower stations, the pulp and paper industry, latest technological solutions, constant technical the metalworking and steel industries, and solid/liquid enhancement, and state-of-the-art design of our separation in the municipal and industrial sectors. products. Continuous growth and implementation of cost effective manufacturing processes led to the ANDRITZ Hydro is part of the ANDRITZ GROUP and is a development of manufacturing centers, specialized global supplier of electro-mechanical equipment and on specific generator product lines and its different services for hydro- and thermal power plants. As one requirements in manufacturing technologies and of the world´s largest suppliers and with 120 years of work processes. experience in electrical engineering we are offering a comprehensive product and service portfolio. ANDRITZ develops, designs, and manufactures state-of-the-art turbo generators for primary drivers Located in Weiz, Austria, the development, design and as gas-, steam turbines and combustion engines manufacturing of turbo generators started in the 1950s. with long life cycles and focus on highest electrical Since then our product range developed and covers efficiency with minimal outage time during operation. currently turbo generators up to 350 MVA. Our goal is to deliver turbo generators according to newest techno- logical standards, providing flexibility to changing grid conditions and delivering highest possible efficiency. Until today, more than 1,380 turbo generators with a HIGHLIGHTS: total output of over 147,000 MVA were manufactured and delivered to more than 75 countries by ANDRITZ. -

The Effects of High Vibration on the Steam Turbo-Generator Machine of the Unit B1 339 MW in Thermal Power Plant •Œkosovo B
Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 2009 The ffecE ts of high vibration on the steam turbo- generator machine of the unit B1 339 MW in thermal power plant “Kosovo B” : [presented August 2009] Jonuz Saraci Follow this and additional works at: http://scholarworks.rit.edu/theses Recommended Citation Saraci, Jonuz, "The Effects of high vibration on the steam turbo-generator machine of the unit B1 339 MW in thermal power plant “Kosovo B” : [presented August 2009]" (2009). Thesis. Rochester Institute of Technology. Accessed from This Master's Project is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact [email protected]. Capstone Project Capstone Project The Effects of High Vibration on the Steam Turbo-Generator Machine of the Unit B1 339 MW in Thermal Power Plant “Kosovo B” Submitted as a Capstone Project in partial fulfillment of a Master’s of Science Degree in Energy & Resource Development at the RIT Center for Multidisciplinary Studies Prepared by: Jonuz Saraçi August, 2009 Page 1 Capstone Project Table of Contents ABSTRACT……………………………………………………………………………………….3 1. INTRODUCTION……………………………………………………………………………...4 2. PROBLEM BACKGROUND………………………………………………………………….6 3. APPROACH TO SOLVING THE PROBLEM……………………………………………….11 3.1 Analysis of the Machine’s Construction Design and Technical Data……………………12 3.1.1 Steam -

Modern Small and Microcogeneration Systems—A Review
energies Review Modern Small and Microcogeneration Systems—A Review Marcin Wołowicz 1,* , Piotr Kolasi ´nski 2 and Krzysztof Badyda 1 1 Faculty of Power and Aeronautical Engineering, Institute of Heat Engineering, Warsaw University of Technology, 00-661 Warsaw, Poland; [email protected] 2 Department of Thermodynamics and Renewable Energy Sources, Faculty of Mechanical and Power Engineering, Wrocław University of Science and Technology, 50-370 Wrocław, Poland; [email protected] * Correspondence: [email protected] Abstract: Small and micro energy sources are becoming increasingly important in the current environmental conditions. Especially, the production of electricity and heat in so-called cogeneration systems allows for significant primary energy savings thanks to their high generation efficiency (up to 90%). This article provides an overview of the currently used and developed technologies applied in small and micro cogeneration systems i.e., Stirling engines, gas and steam microturbines, various types of volumetric expanders (vane, lobe, screw, piston, Wankel, gerotor) and fuel cells. Their basic features, power ranges and examples of implemented installations based on these technologies are presented in this paper. Keywords: microturbine; stirling engine; fuel cell; expander; vane; lobe; screw; piston; Wankel; gerotor; microcogeneration; CHP 1. Introduction For several decades the continuous energy consumption growth has been observed globally. This trend is mainly caused by the growing energy needs of an increasing world Citation: Wołowicz, M.; Kolasi´nski, population, life quality improvement and technological development. The social access to P.; Badyda, K. Modern Small and different energy receivers (e.g., household appliances, cars, electronic devices, etc.) and Microcogeneration Systems—A their availability is nowadays easier than before, which directly translates into increasing Energies 2021 14 Review.