ALTERNATORS ➣ Armature Windings ➣ Wye and Delta Connections ➣ Distribution Or Breadth Factor Or Winding Factor Or Spread Factor ➣ Equation of Induced E.M.F
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Metis Design Corporation (MDC)
40 kW Turbo-Alternator Hybrid-Electric Range Extender AHS Transformative Vertical Flight Concepts Workshop Rory Keogh, Ph.D. Lead Propulsion Engineer August 2015 structural health monitoring multi-functional materials lean enterprise solutions 1501 Mariposa St • San Francisco, CA 94107 • 415.572.1843 • http://www.metisdesign.com Metis Design Corporation (MDC) Overview • Introduction to Metis Design • Project Background • Technology Overview – Turbomachinery and generator – Waste heat recovery (recuperation) – Performance metrics and scalability – Noise • Summary © 2015 Metis Design Corporation Microturbine Range Extender 2 of 32 Metis Design Corporation (MDC) • Offer novel multi-disciplinary defense, aerospace & energy solutions • Diverse engineering staff solid fundamental principles (10/14 staff hold Ph.D.’s) hands-on experience from 42 SBIR/BAA contracts over 12 years Boston MA headquarters & satellite offices in CA & NM • MDC has invented multiple disruptive technologies Microturbine range extender Carbon nanotube (CNT) de-icing & anti-icing system for composite wings Distributed SHM/HUMS sensor digital infrastructure © 2015 Metis Design Corporation Microturbine Range Extender 3 of 32 Background Projects Micro-Turbofan for small scale high performance aircraft Turbo-generator to flight test sub-scale electric aircraft Microturbine battery electric vehicle range extender Microturbine for residential combined heat and power © 2015 Metis Design Corporation Microturbine Range Extender 4 of 32 Metis Design Corporation (MDC) • Rory Keogh Joined Metis Design in 2010 to lead DARPA funded jet engine project B.E. Mech. from NUI Galway, M.S. & Ph.D. from MIT Dept. of Aero and Astronautics 5 years experience at Boeing (Mechanical Systems) and 6 years management consulting • Greg Thomas Joined Metis Design in 2010 to work on DARPA funded jet engine project M.Eng. -

The Role of MHD Turbulence in Magnetic Self-Excitation in The
THE ROLE OF MHD TURBULENCE IN MAGNETIC SELF-EXCITATION: A STUDY OF THE MADISON DYNAMO EXPERIMENT by Mark D. Nornberg A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Physics) at the UNIVERSITY OF WISCONSIN–MADISON 2006 °c Copyright by Mark D. Nornberg 2006 All Rights Reserved i For my parents who supported me throughout college and for my wife who supported me throughout graduate school. The rest of my life I dedicate to my daughter Margaret. ii ACKNOWLEDGMENTS I would like to thank my adviser Cary Forest for his guidance and support in the completion of this dissertation. His high expectations and persistence helped drive the work presented in this thesis. I am indebted to him for the many opportunities he provided me to connect with the world-wide dynamo community. I would also like to thank Roch Kendrick for leading the design, construction, and operation of the experiment. He taught me how to do science using nothing but duct tape, Sharpies, and Scotch-Brite. He also raised my appreciation for the artistry of engineer- ing. My thanks also go to the many undergraduate students who assisted in the construction of the experiment, especially Craig Jacobson who performed graduate-level work. My research partner, Erik Spence, deserves particular thanks for his tireless efforts in modeling the experiment. His persnickety emendations were especially appreciated as we entered the publi- cation stage of the experiment. The conversations during our morning commute to the lab will be sorely missed. I never imagined forging such a strong friendship with a colleague, and I hope our families remain close despite great distance. -
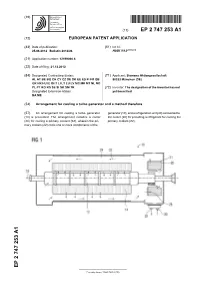
Arrangement for Cooling a Turbo Generator and a Method Therefore
(19) TZZ ¥_T (11) EP 2 747 253 A1 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51) Int Cl.: 25.06.2014 Bulletin 2014/26 H02K 9/12 (2006.01) (21) Application number: 12199000.6 (22) Date of filing: 21.12.2012 (84) Designated Contracting States: (71) Applicant: Siemens Aktiengesellschaft AL AT BE BG CH CY CZ DE DK EE ES FI FR GB 80333 München (DE) GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR (72) Inventor: The designation of the inventor has not Designated Extension States: yet been filed BA ME (54) Arrangement for cooling a turbo generator and a method therefore (57) An arrangement for cooling a turbo generator generator (10), and a refrigeration unit (40) connected to (10) is presented. The arrangement includes a cooler the cooler (20) for providing a refrigerant for cooling the (20) for cooling a primary coolant (22), wherein the pri- primary coolant (22). mary coolant (22) cools one or more components of the EP 2 747 253 A1 Printed by Jouve, 75001 PARIS (FR) 1 EP 2 747 253 A1 2 Description [0011] In another embodiment, the refrigerant is R- 717. R-717 can be liquefied easily by compression or [0001] The present invention relates to a turbo gener- cooling and when returned to its gaseous state, it absorbs ator and more particularly to an arrangement for cooling large amounts of heat from its surroundings, thereby re- a turbo generator. 5 ducing the temperature of the primary coolant. -

Alternator Winding Temperature Rise in Generator Systems
TM Information Sheet # 55 Alternator Winding Temperature Rise in Your Reliable Guide for Power Solutions Generator Systems 1.0 Introduction: When a wire carries electrical current, its temperature will increase due to the resistance of the wire. The factor that mostly influences/ limits the acceptable level of temperature rise is the insulation system employed in an alternator. So the hotter the wire, the shorter the life expectancy of the insulation and thus the alternator. This information sheets discusses how different applications influence temperature rise in alternator windings and classification standards are covered by the National electrical Manufacturers Association (NEMA). (Continued over) Table 1 - Maximum Temperature Rise (40°C Ambient) Continuous Temperature Rise Class A Class B Class F Class H Temp. Rise °C 60 80 105 125 Temp. Rise °F 108 144 189 225 Table 2 - Maximum Temperature Rise (40°C Ambient) Standby Temperature Rise Class A Class B Class F Class H Temp. Rise °C 85 105 130 150 Temp. Rise °F 153 189 234 270 Typical Windings Within a Generator Set’s Alternator Excitor windings Stator windings Rotor windings To fulfill our commitment to be the leading supplier and preferred service provider in the Power Generation Industry, the Clifford Power Systems, Inc. team maintains up-to-date technology and information standards on Power Industry changes, regulations and trends. As a service, our Information Sheets are circulated on a regular basis, to existing and potential Power Customers to maintain awareness of changes and -

Appendix B: Soft Starter Application Considerations BBB
AAPPENDIXPPENDIX APPENDIX B: SOFT STARTER APPLICATION CONSIDERATIONS BBB TABLE OF CONTENTS Appendix B: Soft Starter Application Considerations �� � � � � � � � � � � � � � � � � � � � � � � B–1 B�1 – Motor Suitability and Associated Considerations� � � � � � � � � � � � � � � � � � � � � B–2 B�1�1 – Suitability� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–2 B�1�2 – Induction Motor Characteristics �� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–2 B�1�3 – Rating� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–2 B�1�4 – Maximum Motor Cable Length� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�5 – Power Factor Correction Capacitors �� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�6 – Lightly Loaded Small Motors � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�7 – Motors Installed with Integral Brakes � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�8 – Older Motors� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�9 – Wound-rotor or Slip-ring Motors � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�10 – Enclosures � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–3 B�1�11 – Efficiency �� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � B–4 B�1�12 – High-Efficiency Motors � � � � � � -

Parameters Effects on Force in Tubular Linear Induction Motors with Blocked Rotor
Proc. of the 5th WSEAS/IASME Int. Conf. on Electric Power Systems, High Voltages, Electric Machines, Tenerife, Spain, December 16-18, 2005 (pp92-97) Parameters Effects on Force in Tubular Linear Induction Motors with Blocked Rotor REZA HAGHMARAM(1,2), ABBAS SHOULAIE(2) (1) Department of Electrical Engineering, Imam Hosein University, Babaie Highway, Tehran (2) Department of Electrical Engineering, Iran University of Science & Technology, Narmak, Tehran IRAN Abstract: This paper is concerned with the study of several parameters effects on longitudinal force applied on the rotor in the generator driven air-core tubular linear induction motors with blocked rotor. With developing the motor modeling by involving temperature equations in the previous computer code, we first study variations of the coils and rings temperatures and the effect of the temperature on the rotor force. In the next section, the effect of the rotor length on the rotor force is studied and it is shown that there is an almost linear relation between the rotor length and the rotor force. Finally we have given the optimum time step for solving the state equations of the motor and calculating the force. By this time step the code will have reasonable speed and accuracy. These studies can be useful for the force motors and for finding a view for dynamic state analysis of the acceleration motors. Keywords: - Air Core Tubular Linear Induction Motor, Coilgun, Linear Induction Launcher 1 Introduction the value of coils and rings currents and calculating Tubular Linear Induction Motors (TLIMs) may the gradient of mutual inductance between coils and have unique applications as electromagnetic rings, we can calculate the force applied on the launchers with very high speed and acceleration rotor [3]. -

Direct Torque Control of Induction Motors
DIRECT TORQUE CONTROL FOR INDUCTION MOTOR DRIVES MAIN FEATURES OF DTC · Decoupled control of torque and flux · Absence of mechanical transducers · Current regulator, PWM pulse generation, PI control of flux and torque and co-ordinate transformation are not required · Very simple control scheme and low computational time · Reduced parameter sensitivity BLOCK DIAGRAM OF DTC SCHEME + _ s* s j s + Djs _ Voltage Vector s * T + j s DT Selection _ T S S S s Stator a b c Torque j s s E Flux vs 2 Estimator Estimator 3 s is 2 i b i a 3 Induction Motor In principle the DTC method selects one of the six nonzero and two zero voltage vectors of the inverter on the basis of the instantaneous errors in torque and stator flux magnitude. MAIN TOPICS Þ Space vector representation Þ Fundamental concept of DTC Þ Rotor flux reference Þ Voltage vector selection criteria Þ Amplitude of flux and torque hysteresis band Þ Direct self control (DSC) Þ SVM applied to DTC Þ Flux estimation at low speed Þ Sensitivity to parameter variations and current sensor offsets Þ Conclusions INVERTER OUTPUT VOLTAGE VECTORS I Sw1 Sw3 Sw5 E a b c Sw2 Sw4 Sw6 Voltage-source inverter (VSI) For each possible switching configuration, the output voltages can be represented in terms of space vectors, according to the following equation æ 2p 4p ö s 2 j j v = ç v + v e 3 + v e 3 ÷ s ç a b c ÷ 3 è ø where va, vb and vc are phase voltages. -

Pulsed Rotating Machine Power Supplies for Electric Combat Vehicles
Pulsed Rotating Machine Power Supplies for Electric Combat Vehicles W.A. Walls and M. Driga Department of Electrical and Computer Engineering The University of Texas at Austin Austin, Texas 78712 Abstract than not, these test machines were merely modified gener- ators fitted with damper bars to lower impedance suffi- As technology for hybrid-electric propulsion, electric ciently to allow brief high current pulses needed for the weapons and defensive systems are developed for future experiment at hand. The late 1970's brought continuing electric combat vehicles, pulsed rotating electric machine research in fusion power, renewed interest in electromag- technologies can be adapted and evolved to provide the netic guns and other pulsed power users in the high power, maximum benefit to these new systems. A key advantage of intermittent duty regime. Likewise, flywheels have been rotating machines is the ability to design for combined used to store kinetic energy for many applications over the requirements of energy storage and pulsed power. An addi - years. In some cases (like utility generators providing tran- tional advantage is the ease with which these machines can sient fault ride-through capability), the functions of energy be optimized to service multiple loads. storage and power generation have been combined. Continuous duty alternators can be optimized to provide Development of specialized machines that were optimized prime power energy conversion from the vehicle engine. for this type of pulsed duty was needed. In 1977, the laser This paper, however, will focus on pulsed machines that are fusion community began looking for an alternative power best suited for intermittent and pulsed loads requiring source to capacitor banks for driving laser flashlamps. -

An Engineering Guide to Soft Starters
An Engineering Guide to Soft Starters Contents 1 Introduction 1.1 General 1.2 Benefits of soft starters 1.3 Typical Applications 1.4 Different motor starting methods 1.5 What is the minimum start current with a soft starter? 1.6 Are all three phase soft starters the same? 2 Soft Start and Soft Stop Methods 2.1 Soft Start Methods 2.2 Stop Methods 2.3 Jog 3 Choosing Soft Starters 3.1 Three step process 3.2 Step 1 - Starter selection 3.3 Step 2 - Application selection 3.4 Step 3 - Starter sizing 3.5 AC53a Utilisation Code 3.6 AC53b Utilisation Code 3.7 Typical Motor FLCs 4 Applying Soft Starters/System Design 4.1 Do I need to use a main contactor? 4.2 What are bypass contactors? 4.3 What is an inside delta connection? 4.4 How do I replace a star/delta starter with a soft starter? 4.5 How do I use power factor correction with soft starters? 4.6 How do I ensure Type 1 circuit protection? 4.7 How do I ensure Type 2 circuit protection? 4.8 How do I select cable when installing a soft starter? 4.9 What is the maximum length of cable run between a soft starter and the motor? 4.10 How do two-speed motors work and can I use a soft starter to control them? 4.11 Can one soft starter control multiple motors separately for sequential starting? 4.12 Can one soft starter control multiple motors for parallel starting? 4.13 Can slip-ring motors be started with a soft starter? 4.14 Can soft starters reverse the motor direction? 4.15 What is the minimum start current with a soft starter? 4.16 Can soft starters control an already rotating motor (flying load)? 4.17 Brake 4.18 What is soft braking and how is it used? 5 Digistart Soft Starter Selection 5.1 Three step process 5.2 Starter selection 5.3 Application selection 5.4 Starter sizing 1. -

The Fundamentals of Ac Electric Induction Motor Design and Application
THE FUNDAMENTALS OF AC ELECTRIC INDUCTION MOTOR DESIGN AND APPLICATION by Edward J. Thornton Electrical Consultant E. I. du Pont de Nemours Houston, Texas and J. Kirk Armintor Senior Account Sales Engineer Rockwell Automation The Woodlands, Texas Edward J. (Ed) Thornton is an Electrical Electrical Mechanical Consultant in the Electrical Technology Coupling System Field System Consulting Group in Engineering at DuPont, in Houston, Texas. His specialty is the design, operation, and maintenance of electric power distribution systems and large motor installations. He has 20 years E , I T , w of consulting experience with DuPont. Mr. Thornton received his B.S. degree Figure 1. Block Representation of Energy Conversion for Motors. (Electrical Engineering, 1978) from Virginia Polytechnic Institute and State University. The coupling magnetic field is key to the operation of electrical He is a registered Professional Engineer in the State of Texas. apparatus such as induction motors. The fundamental laws associated with the relationship between electricity and magnetism were derived from experiments conducted by several key scientists J. Kirk Armintor is a Senior Account in the 1800s. Sales Engineer in the Rockwell Automation Houston District Office, in The Woodlands, Basic Design and Theory of Operation Texas. He has 32 years’ experience with The alternating current (AC) induction motor is one of the most motor applications in the petroleum, rugged and most widely used machines in industry. There are two chemical, paper, and pipeline industries. major components of an AC induction motor. The stationary or He has authored technical papers on motor static component is the stator. The rotating component is the rotor. -
Design and Optimization of an Electromagnetic Railgun
Michigan Technological University Digital Commons @ Michigan Tech Dissertations, Master's Theses and Master's Reports 2018 DESIGN AND OPTIMIZATION OF AN ELECTROMAGNETIC RAILGUN Nihar S. Brahmbhatt Michigan Technological University, [email protected] Copyright 2018 Nihar S. Brahmbhatt Recommended Citation Brahmbhatt, Nihar S., "DESIGN AND OPTIMIZATION OF AN ELECTROMAGNETIC RAILGUN", Open Access Master's Report, Michigan Technological University, 2018. https://doi.org/10.37099/mtu.dc.etdr/651 Follow this and additional works at: https://digitalcommons.mtu.edu/etdr Part of the Controls and Control Theory Commons DESIGN AND OPTIMIZATION OF AN ELECTROMAGNETIC RAIL GUN By Nihar S. Brahmbhatt A REPORT Submitted in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE In Electrical Engineering MICHIGAN TECHNOLOGICAL UNIVERSITY 2018 © 2018 Nihar S. Brahmbhatt This report has been approved in partial fulfillment of the requirements for the Degree of MASTER OF SCIENCE in Electrical Engineering. Department of Electrical and Computer Engineering Report Advisor: Dr. Wayne W. Weaver Committee Member: Dr. John Pakkala Committee Member: Dr. Sumit Paudyal Department Chair: Dr. Daniel R. Fuhrmann Table of Contents Abstract ........................................................................................................................... 7 Acknowledgments........................................................................................................... 8 List of Figures ................................................................................................................ -

Abstract Controlling Ac Motor Using Arduino
ABSTRACT CONTROLLING AC MOTOR USING ARDUINO MICROCONTROLLER Nithesh Reddy Nannuri, M.S. Department of Electrical Engineering Northern Illinois University, 2014 Donald S Zinger, Director Space vector modulation (SVM) is a technique used for generating alternating current waveforms to control pulse width modulation signals (PWM). It provides better results of PWM signals compared to other techniques. CORDIC algorithm calculates hyperbolic and trigonometric functions of sine, cosine, magnitude and phase using bit shift, addition and multiplication operations. This thesis implements SVM with Arduino microcontroller using CORDIC algorithm. This algorithm is used to calculate the PWM timing signals which are used to control the motor. Comparison of the time taken to calculate sinusoidal signal using Arduino and CORDIC algorithm was also done. NORTHERN ILLINOIS UNIVERSITY DEKALB, ILLINOIS DECEMBER 2014 CONTROLLING AC MOTOR USING ARDUINO MICROCONTROLLER BY NITHESH REDDY NANNURI ©2014 Nithesh Reddy Nannuri A THESIS SUBMITTED TO THE GRADUATE SCHOOL IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE MASTER OF SCIENCE DEPARTMENT OF ELECTRICAL ENGINEERING Thesis Director: Dr. Donald S Zinger ACKNOWLEDGEMENTS I would like to express my sincere gratitude to Dr. Donald S. Zinger for his continuous support and guidance in this thesis work as well as throughout my graduate study. I would like to thank Dr. Martin Kocanda and Dr. Peng-Yung Woo for serving as members of my thesis committee. I would like to thank my family for their unconditional love, continuous support, enduring patience and inspiring words. Finally, I would like to thank my friends and everyone who has directly or indirectly helped me for their cooperation in completing the thesis.