Heat Exchanger Fouling and Estimation of Remaining Useful Life
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Wastewater Technology Fact Sheet: Ammonia Stripping
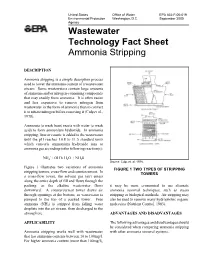
United States Office of Water EPA 832-F-00-019 Environmental Protection Washington, D.C. September 2000 Agency Wastewater Technology Fact Sheet Ammonia Stripping DESCRIPTION Ammonia stripping is a simple desorption process used to lower the ammonia content of a wastewater stream. Some wastewaters contain large amounts of ammonia and/or nitrogen-containing compounds that may readily form ammonia. It is often easier and less expensive to remove nitrogen from wastewater in the form of ammonia than to convert it to nitrate-nitrogen before removing it (Culp et al., 1978). Ammonia (a weak base) reacts with water (a weak acid) to form ammonium hydroxide. In ammonia stripping, lime or caustic is added to the wastewater until the pH reaches 10.8 to 11.5 standard units which converts ammonium hydroxide ions to ammonia gas according to the following reaction(s): + - NH4 + OH 6 H2O + NH38 Source: Culp, et. al, 1978. Figure 1 illustrates two variations of ammonia FIGURE 1 TWO TYPES OF STRIPPING stripping towers, cross-flow and countercurrent. In TOWERS a cross-flow tower, the solvent gas (air) enters along the entire depth of fill and flows through the packing, as the alkaline wastewater flows it may be more economical to use alternate downward. A countercurrent tower draws air ammonia removal techniques, such as steam through openings at the bottom, as wastewater is stripping or biological methods. Air stripping may pumped to the top of a packed tower. Free also be used to remove many hydrophobic organic ammonia (NH3) is stripped from falling water molecules (Nutrient Control, 1983). droplets into the air stream, then discharged to the atmosphere. -
Factors Impacting EGR Cooler Fouling – Main Effects and Interactions
Emissions Controls Technologies, Part 2 Factors Impacting EGR Cooler Fouling – Main Effects and Interactions 16th Directions in Engine-Efficiency and Emissions Research Conference Detroit, MI – September, 2010 Dan Styles, Eric Curtis, Nitia Ramesh Ford Motor Company – Powertrain Research and Advanced Engineering John Hoard, Dennis Assanis, Mehdi Abarham University of Michigan Scott Sluder, John Storey, Michael Lance Oakridge National Laboratory Page 1 DEER 2010 Benefits and Challenges of Cooled EGR • Benefits • Challenges Enables more EGR flow More HC’s/SOF Cooler intake charge temp More PM Reduces engine out NOx More heat rejection by reduced peak in-cylinder More condensation temps HC/PM deposition in cooler (fouling) degraded heat transfer and higher flow resistance Increasing EGR Rate PM Increasing EGR Cooling NOx After 200 hr. Fouling Test Page 2 DEER 2010 What is EGR Cooler Fouling? • Deposition of Exhaust Constituents on EGR Cooler Walls Decreases heat transfer effectiveness and increases flow restrictiveness Page 3 DEER 2010 Previous DEER Conferences • DEER 2007 Benefits of an EGR catalyst for EGR Cooler Fouling Reduction • DEER 2008 Overview of EGR Cooler Fouling Literature Search Results of initial controlled fouling experiment High gas flow velocities reduce exhaust constituent trapping efficiency Low coolant temperatures increase Hydrocarbon condensation An oxidation catalyst is only marginally helpful at eliminating the heavier Hydrocarbons that are likely to condense in an EGR cooler • DEER 2009 Further -

Investigation of Fouling Mechanisms on Ion Exchange Membranes During Electrolytic Separations
INVESTIGATION OF FOULING MECHANISMS ON ION EXCHANGE MEMBRANES DURING ELECTROLYTIC SEPARATIONS By Matthew James Edwards A thesis submitted to the faculty of The University of Mississippi in partial fulfillment of the requirements of the Sally McDonnell Barksdale Honors College. Oxford, MS 2019 Approved by: __________________________________ Advisor: Dr. Alexander M. Lopez _________________________________ Reader: Dr. Adam Smith __________________________________ Reader: Dr. John H. O’Haver i Ó 2019 Matthew James Edwards ALL RIGHTS RESERVED ii DEDICATION I would like to dedicate this Capstone Project to my parents, Michael and Nidia Edwards. Their support and commitment to my education has been unfailing for as long as I can remember. I am thankful for everything they have done. It is with their help that I am privileged to attend The University of Mississippi, and I will forever be grateful. iii ACKNOWLEDGEMENTS I would first like thank Dr. Alexander M. Lopez and The University of Mississippi Chemical Engineering Department for the opportunity to work on this research project. The guidance, patience, and willingness to work with and teach an undergraduate student has been beneficial and inspiring to me during my time here at Ole Miss. Second, I would like to thank Dr. Paul Scovazzo for providing guidance on how to write this thesis and for allowing me to use his lab and equipment as well. I would also like to thank all the graduate students of the Chemical Engineering Department, primarily Saloumeh Kolahchyan. The willingness to take the time to answer my questions, to guide me in how use all the equipment in the lab, and to show me how to follow lab protocols required for the completion of my thesis research. -

An Analysis of Water for Water-Side Fouling Potential Inside Smooth
AN ANALYIS OF WATER FOR WATER-SIDE FOULING POTENTIAL INSIDE SMOOTH AND AUGMENTED COPPER ALLOY CONDENSER TUBES IN COOLING TOWER WATER APPLICATIONS by Ian Tubman A Thesis Submitted to the Faculty of Mississippi State University in Partial Fulfillment of the Requirements for the Degree of Master of Science in Mechanical Engineering in the Department of Mechanical Engineering Mississippi State, Mississippi December 2002 AN ANALYIS OF WATER FOR WATER-SIDE FOULING POTENTIAL INSIDE SMOOTH AND AUGMENTED COPPER ALLOY CONDENSER TUBES IN COOLING TOWER WATER APPLICATIONS by Ian Tubman Approved: _________________________ ________________________ Louay Chamra Rogelio Luck Associate Professor of Associate Professor and Mechanical Engineering Graduate Coordinator of the (Director of Thesis) Department of Mechanical Engineering _________________________ ________________________ B.Keith Hodge Carl A. James Professor of Assistant Research Professor Mechanical Engineering of Mechanical Engineering (Committee Member) (Committee Member) _________________________ A. Wayne Bennett Dean of the James Worth Bagley College of Engineering Name: Ian Tubman Date of Degree: May 10, 2003 Institution: Mississippi State University Major Field: Mechanical Engineering Major Professor: Dr. Louay Chamra Title of Study: AN ANALYIS OF WATER FOR WATER-SIDE FOULING POTENTIAL INSIDE SMOOTH AND AUGMENTED COPPER ALLOY CONDENSER TUBES IN COOLING TOWER WATER APPLICATIONS Pages in Study: 100 Candidate for Degree of Master of Science This thesis investigates the potential for fouling in plain and augmented tubes in cooling tower applications. Three primary factors that affect fouling potential are examined: inside tube geometry, water velocity, and water quality. This paper presents a literature survey for in general precipitation fouling, particulate fouling, cooling water fouling, and fouling in enhanced tubes. -

Performance of a Novel Green Scale Inhibitor
E3S Web of Conferences 266, 01019 (2021) https://doi.org/10.1051/e3sconf/202126601019 TOPICAL ISSUES 2021 Performance of a novel green scale inhibitor Leila Mahmoodi1, M. Reza Malayeri2, Farshad Farshchi Tabrizi3 1Department of Chemical Engineering, School of Chemical and Petroleum Engineering, Shiraz Uni- versity, Iran 2Technische Universität Dresden, Dresden, Germany 3Department of Chemical Engineering, School of Chemical and Petroleum Engineering, Shiraz Uni- versity, Iran Abstract:Many aspects of oilfield scale inhibition with green scale inhibi- tors (SIs) have remained untouched. For instance, the discharge of large amounts of produced water containing various types of hazardous chemi- cals, such as SIs into the environment has become a major concern. In- stead, environmental regulators encourage operators to look for greener SIs. In this study, the performance of a green SI was investigated using PHREEQC simulation. For a specific case study, two brines are considered to mix incompatibly to estimate the critical mixing ratio that has the high- est tendency to scaling. Subsequently, for 50/50 mixing ratio as the critical value, theoptimal dosage of SI and its performance in the presence of two different rocks were investigated such that 450 mg/L SI would be consi- dered as optimal value. Moreover, the simulated results show that more SI adsorption on calcite would be predicted, compared to dolomite. 1 Introduction In the oil and gas industry, one of the primary production problems is mineral deposition resulting from the water-flooding, incompatible water mixing, and/or hydro-fracturing processes that are applied to maintain sustainable hydrocarbon production in oil, gas, or gas-condensate fields [1]. -

Fouling Factors: a Survey of Their Application in Today's Air Conditioning and Refrigeration Industry
AHRI Guideline E (formerly ARI Guideline E) 1997 GUIDELINE for Fouling Factors: A Survey Of Their Application In Today's Air Conditioning And Refrigeration Industry IMPORTANT SAFETY RECOMMENDATIONS It is strongly recommended that the product be designed, constructed, assembled and installed in accordance with nationally recognized safety requirements appropriate for products covered by this guideline. ARI, as a manufacturers' trade association, uses its best efforts to develop guidelines employing state-of-the-art and accepted industry practices. However, ARI does not certify or guarantee safety of any products, components or systems designed, tested, rated, installed or operated in accordance with these guidelines or that any tests conducted under its standards will be non-hazardous or free from risk. Note: This guideline supersedes ARI Guideline E-1988. Price $10.00 (M) $20.00 (NM) ©Copyright 1997, by Air-Conditioning, Heating, and Refrigeration Institute Printed in U.S.A. Registered United States Patent and Trademark Office TABLE OF CONTENTS SECTION PAGE Section 1. Purpose ...................................................................................................................... 1 Section 2. Scope ......................................................................................................................... 1 Section 3. Definitions................................................................................................................. 1 Section 4. Background .............................................................................................................. -
Selective Catalytic Reduction (SCR) Are
EPA/452/B-02-001 Section 4 NOx Controls EPA/452/B-02-001 Section 4.2 NOx Post- Combustion i Introduction Nitrogen oxides (NOx) are gaseous pollutants that are primarily formed through combustion process. While flue gas is within the combustion unit, about 95% of the NOx exists in the form of nitric oxide (NO). The balance is nitrogen dioxide (NO2), which is unstable at high temperatures. Once the flue gas is emitted into the atmosphere, most of the NOx is ultimately converted to NO2. NOx in the atmosphere reacts in the presence of sunlight to form ozone (O3), one of the criteria pollutants for which health-based National Ambient Air Quality Standards have been established. Since ozone formation requires sunlight and high temperatures, ozone formation is greatest in summer months. NOx is generated in one of three forms; fuel NOx, thermal NOx, and prompt NOx. Fuel NOx is produced by oxidation of nitrogen in the fuel source. Combustion of fuels with high nitrogen content such as coal and residual oils produces greater amounts of NOx than those with low nitrogen content such as distillate oil and natural gas. Thermal NOx is formed by the fixation of ° ° molecular nitrogen and oxygen at temperatures greater than 3600 F (2000 C). Prompt NOx forms from the oxidation of hydrocarbon radicals near the combustion flame and produces an insignificant amount of NOx. Selective Noncatalytic Reduction (SNCR) and Selective Catalytic Reduction (SCR) are post-combustion control technologies based on the chemical reduction of nitrogen oxides (NOx) into molecular nitrogen (N2) and water vapor (H2O). -

Characteristics of Cooling Water Fouling in a Heat Exchange System Sun-Kyung Sung1,*, Sang-Ho Suh2 and Dong-Woo Kim3 1Dept
Journal of Mechanical Science and Technology Journal of Mechanical Science and Technology 22 (2008) 1568~1575 www.springerlink.com/content/1738-494x DOI 10.1007/s12206-008-0422-9 Characteristics of cooling water fouling in a heat exchange system Sun-Kyung Sung1,*, Sang-Ho Suh2 and Dong-Woo Kim3 1Dept. of Building Equipment System Engineering, Kyungwon University , Sungnam Kyonggi 461-702, Korea 2Dept. of Mechanical Engineering, Soongsil University, Seoul 156-743, Korea 3Dept. of Building Technology, Suwon Science College, Hwasung, Kyonggi 445-742, Korea (Manuscript Received June 14, 2007; Revised April 6, 2008; Accepted April 22, 2008) -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- Abstract This study investigated the efficiency of the physical water treatment method in preventing and controlling fouling accumulation on heat transfer surfaces in a laboratory heat exchange system with tap and artificial water. To investigate the fouling characteristics, an experimental test facility with a plate type heat exchange system was newly built, where cooling and hot water moved in opposite directions forming a counter-flow heat exchanger. The obtained fouling resis- tances were used to analyze the effects of the physical water treatment on fouling mitigation. Furthermore, the surface tension and pH values of water were also measured. This study -

Four Types of Heat Exchanger Failures
Four Types of Heat Exchanger Failures . mechanical, chemically induced corrosion, combination of mechanical and chemically induced corrosion, and scale, mud, and algae fouling By MARVIN P. SCHWARTZ, Chief Product Engineer, ITT Bell & Gossett a unit of Fluid Handling Div., International Telephone & Telegraph Corp , Skokie IL Hcat exchangers usually provide a long service life with Maximum recommended velocity in the tubes and little or no maintenance because they do not contain any entrance nozzle is a function of many variables, including moving parts. However, there are four types of heat tube material, fluid handled, and temperature. Materials exchanger failures that can occur, and can usually be such as steel, stainless steel, and copper-nickel withstand prevented: mechanical, chemically induced corrosion, higher tube velocities than copper. Copper is normally combination of mechanical and chemically induced limited to 7.5 fps; the other materials can handle 10 or 11 corrosion, and scale, mud. and algae fouling. fps. If water is flowing through copper tubing, the velocity This article provides the plant engineer with a detailed should be less than 7.5 fps when it contains suspended look at the problems that can develop and describes the solids or is softened. corrective actions that should be taken to prevent them. Erosion problems on the outside of tubes usually result Mechanical-These failures can take seven different from impingement of wet, high-velocity gases, such as forms: metal erosion, steam or water hammer, vibration, steam. Wet gas impingement is controlled by oversizing thermal fatigue, freeze-up, thermal expansion. and loss of inlet nozzles, or by placing impingement baffles in the cooling water. -

Experimental Investigation of Polymer Induced Fouling of Heater Tubes in the First- Please Fill in Your Manuscript Title
Please fill in the name of the event SPE Improved Oil Recovery Conference you are preparing this manuscript for. Please fill in your 6-digit SPE SPE-200463-MS manuscript number. Experimental Investigation of Polymer Induced Fouling of Heater Tubes in the First- Please fill in your manuscript title. ever Polymer Flood Pilot on Alaska North Slope Please fill in your author name(s) and company affiliation. Given Name Surname Company Anshul Dhaliwal University of Alaska Fairbanks Yin Zhang University of Alaska Fairbanks Abhijit Dandekar University of Alaska Fairbanks Samson Ning Reservoir Experts, LLC/Hilcorp Alaska, LLC John Barnes Hilcorp Alaska, LLC Reid Edwards Hilcorp Alaska, LLC Walbert Schulpen Hilcorp Alaska, LLC David Cercone DOE-National Energy Technology Laboratory Jared Ciferno DOE-National Energy Technology Laboratory This template is provided to give authors a basic shell for preparing your manuscript for submittal to an SPE meeting or event. Styles have been included (Head1, Head2, Para, FigCaption, etc) to give you an idea of how your finalized paper will look before it is published by SPE. All manuscripts submitted to SPE will be extracted from this template and tagged into an XML format; SPE’s standardized styles and fonts will be used when laying out the final manuscript. Links will be added to your manuscript for references, tables, and equations. Figures and tables should be placed directly after the first paragraph they are mentioned in. The technical content of your paper WILL NOT be changed. Please start your manuscript below. Abstract Polymer flooding is being pilot tested for the first time in the Schrader Bluff viscous oil reservoir at the Milne Point field on Alaska North Slope. -

Fouling Mitigation by Design
ECI Symposium Series, Volume RP2: Proceedings of 6th International Conference on Heat Exchanger Fouling and Cleaning - Challenges and Opportunities, Editors Hans Müller-Steinhagen, M. Reza Malayeri, and A. Paul Watkinson, Engineering Conferences International, Kloster Irsee, Germany, June 5 - 10, 2005 FOULING MITIGATION BY DESIGN J. Nesta1 and C. A. Bennett2 1 Fluor Canada Ltd., Calgary, Alberta, Canada, E-mail: [email protected] 2 Heat Transfer Research, Inc., College Station, Texas, USA, E-mail: [email protected] ABSTRACT extreme, the coke deposit is a very hard layer of carbon, salts and other compounds. Fouling is a nearly ubiquitous heat transfer Corrosion fouling is the accumulation of corrosion phenomenon that costs world industry billions of U.S. products, such as iron oxide, on the heat transfer surface. dollars annually. However, many fouling mechanisms can Biological fouling is the growth of living organisms, be mitigated with proper design strategy. The key points of like algae and mussels, on the heat transfer surface. the design method described in this paper, regardless of Fouling in service may be a combination of two or service, are to maximize shear stress and control wall more mechanisms. Also, one mechanism may be a fouling temperature. We also generally recommend replacing the precursor for another mechanism. Fluids may be use of fouling factors with 20% excess area. Application of categorized into three groups according to their potential for this field-proven design methodology will significantly fouling (Watkinson, 1988): lower capital costs and substantially increase run time Non-fouling fluids do not require regular cleaning. between cleanings. Some examples are non-polymerizing light hydrocarbons, steam, and sub-cooled boiler feed water. -

Model-Based Evaluation of Air-Side Fouling in Closed-Circuit Cooling Towers
energies Article Model-Based Evaluation of Air-Side Fouling in Closed-Circuit Cooling Towers Björn Nienborg 1,* , Marc Mathieu 2, Alexander Schwärzler 2, Katharina Conzelmann 2 and Lena Schnabel 1 1 Fraunhofer ISE—Institute for Solar Energy Systems, Division Thermal Systems and Buildings, Heidenhofstr. 2, 79110 Freiburg, Germany; [email protected] 2 Dr. O. Hartmann GmbH & Co. KG, Uhlandstrasse 30, 71665 Vaihingen an der Enz, Germany; [email protected] (M.M.); [email protected] (A.S.); [email protected] (K.C.) * Correspondence: [email protected]; Tel.: +49-761-4588-5883 Abstract: Fouling is a permanent problem in process technology and is estimated to cost 0.25% of the gross national product. Evaporative cooling systems are especially susceptible to air-side fouling: as they work with untreated outside air, they are exposed to both natural (e.g., pollen) and human-made (e.g., industrial dust) contaminants. In addition, suspended solid particles and dissolved salts in the spray water are an issue. In this study we analyzed an approach for fouling detection based on a semi-physical (grey-box) cooling tower model which we calibrated with measurement data. A test series with reliable laboratory data indicates good applicability of the model. In three datasets, the performance decreases due to fouling (scaling, which was provoked intentionally) in the range of 5–11% were clearly detected. When applied to measurement data of two cooling towers in real applications, the model also proved to be well calibratable with relatively little data (two to four operating days).