Real-Time 3D Shape Measurement Using 3LCD Projection and Deep Machine Learning
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

AV Solutions Range Guide August 2020 the Sony Solution
NEW WAYS TO INSPIRE Live Your Vision C AV Solutions Range Guide August 2020 The Sony Solution When it comes to professional AV technology, Sony provides much more than just great products. We create solutions that make visual communications and knowledge sharing even smarter and more efficient. Contents We empower organizations of every industry, sector and size with advanced audio-visual tools that help them go further. From schools to universities, small business to big business, retail to automotive, healthcare to faith-based worship and more, we have the perfect solution. Visual Imaging Welcome Projectors Cameras Our comprehensive suite of TEOS solutions intelligently manage all of your connected devices, while our powerful collaboration tools enable real-time The Sony Solution 3 F-Series laser 18 SRG Series 43 knowledge sharing. Discover new levels of detail with our class-leading P-Series laser 24 POV and BOX cameras 44 BRAVIA Professional Displays, and take your presentations further with our bright, captivating range of Laser Projectors.While our renowned lineup of CW-Series 26 BRC Series 45 Service and Support PTZ cameras feature progressive technologies ideal for remote working and F-lamp 28 IP Remote Controllers 46 distance learning applications. CH-lamp 30 SupportNET 5 E-lamp 32 Visual Simulation and Support is at the heart of everything we do. With our SupportNET, you’ll Visual Entertainment always get the best service for your business. With specialist advice and a host of support features included as standard, we’ve got -

Microdisplays - Market, Industry and Technology Trends 2020 Market and Technology Report 2020
From Technologies to Markets Microdisplays - Market, Industry and Technology Trends 2020 Market and Technology Report 2020 Sample © 2020 TABLE OF CONTENTS • Glossary and definition • Industry trends 154 • Table of contents o Established technologies players 156 • Report objectives o Emerging technologies players 158 • Report scope o Ecosystem analysis 160 • Report methodology o Noticeable collaborations and partnerships 170 • About the authors o Company profiles 174 • Companies cited in this report • Who should be interested by this report • Yole Group related reports • Technology trends 187 o Competition benchmarking 189 • Executive Summary 009 o Technology description 191 o Technology roadmaps 209 • Context 048 o Examples of products and future launches 225 • Market forecasts 063 • Outlooks 236 o End-systems 088 o AR headsets 104 • About Yole Group of Companies 238 o Automotive HUDs 110 o Others 127 • Market trends 077 o Focus on AR headsets 088 o A word about VR 104 o Focus on Auto HUDs 110 o Focus on 3D Displays 127 o Summary of other small SLM applications 139 Microdisplays - Market, Industry and Technology Trends 2020 | Sample | www.yole.fr | ©2020 2 ACRONYMS AMOLED: Active Matrix OLED HMD: Head mounted Device/Display PPI: Pixel Per Inch AR: Augmented Reality HOE: Holographic Optical Element PWM: Pulse Width Modulation BLU: Back Lighting Unit HRI: High Refractive Index QD: Quantum Dot CF LCOS: Color Filter LCOS HVS: Human Vision System RGB: Red-Green-Blue CG: Computer Generated IMU: Inertial measurement Unit RMLCM: Reactive Monomer -
Digital Light Processing™: a New MEMS-Based Display Technology
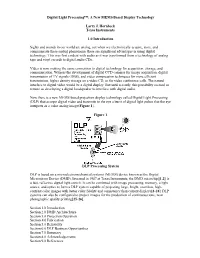
Digital Light Processing™: A New MEMS-Based Display Technology Larry J. Hornbeck Texas Instruments 1.0 Introduction Sights and sounds in our world are analog, yet when we electronically acquire, store, and communicate these analog phenomena, there are significant advantages in using digital technology. This was first evident with audio as it was transformed from a technology of analog tape and vinyl records to digital audio CDs. Video is now making the same conversion to digital technology for acquisition, storage, and communication. Witness the development of digital CCD cameras for image acquisition, digital transmission of TV signals (DBS), and video compression techniques for more efficient transmission, higher density storage on a video CD, or for video conference calls. The natural interface to digital video would be a digital display. But until recently, this possibility seemed as remote as developing a digital loudspeaker to interface with digital audio. Now there is a new MEMS-based projection display technology called Digital Light Processing (DLP) that accepts digital video and transmits to the eye a burst of digital light pulses that the eye interprets as a color analog image(Figure 1). Figure 1 DLP Processing System DLP is based on a microelectromechanical systems (MEMS) device known as the Digital Micromirror Device (DMD). Invented in 1987 at Texas Instruments, the DMD microchip[1,2] is a fast, reflective digital light switch. It can be combined with image processing, memory, a light source, and optics to form a DLP system capable of projecting large, bright, seamless, high- contrast color images with better color fidelity and consistency than current displays[3-24]. -
Epson Projector Fact Sheet
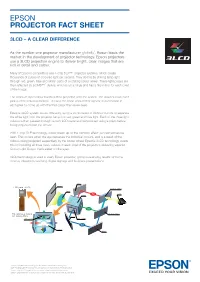
EPSON PROJECTOR FACT SHEET 3LCD – A CLEAR DIFFERENCE As the number one projector manufacturer globally1, Epson leads the market in the development of projector technology. Epson projectors use a 3LCD projection engine to deliver bright, clear images that are rich in detail and colour. 2 Many of Epson’s competitors use 1-chip DLP™ projector systems, which create thousands of pulses of coloured light per second. They do this by shining lamp light 3 through red, green, blue and white parts of a rotating colour wheel. These light pulses are 4 then reflected by a DMD™ device, which is on a hinge and has a tiny mirror for each pixel of the image. The series of rapid colour bursts is then projected onto the screen. The viewer’s brain can’t pick out the individual flickers - it mixes the basic colours that appear in succession in each pixel to come up with the final colour the viewer sees. Epson’s 3LCD system works differently, using a combination of dichroic mirrors to separate the white light from the projector lamp into red, green and blue light. Each of the three light colours is then passed through its own LCD panel and recombined using a prism before being projected onto the screen. With 1-chip DLP technology, colour break-up or the ‘rainbow effect’ can sometimes be seen. This occurs when the eye perceives the individual colours, and is a result of the colours being projected sequentially by the colour wheel. Epson’s 3LCD technology avoids this by including all three basic colours in each pixel of the projection, delivering superior Colour Light Output that’s easier on the eyes. -

Review of Display Technologies Focusing on Power Consumption
Sustainability 2015, 7, 10854-10875; doi:10.3390/su70810854 OPEN ACCESS sustainability ISSN 2071-1050 www.mdpi.com/journal/sustainability Review Review of Display Technologies Focusing on Power Consumption María Rodríguez Fernández 1,†, Eduardo Zalama Casanova 2,* and Ignacio González Alonso 3,† 1 Department of Systems Engineering and Automatic Control, University of Valladolid, Paseo del Cauce S/N, 47011 Valladolid, Spain; E-Mail: [email protected] 2 Instituto de las Tecnologías Avanzadas de la Producción, University of Valladolid, Paseo del Cauce S/N, 47011 Valladolid, Spain 3 Department of Computer Science, University of Oviedo, C/González Gutiérrez Quirós, 33600 Mieres, Spain; E-Mail: [email protected] † These authors contributed equally to this work. * Author to whom correspondence should be addressed; E-Mail: [email protected]; Tel.: +34-659-782-534. Academic Editor: Marc A. Rosen Received: 16 June 2015 / Accepted: 4 August 2015 / Published: 11 August 2015 Abstract: This paper provides an overview of the main manufacturing technologies of displays, focusing on those with low and ultra-low levels of power consumption, which make them suitable for current societal needs. Considering the typified value obtained from the manufacturer’s specifications, four technologies—Liquid Crystal Displays, electronic paper, Organic Light-Emitting Display and Electroluminescent Displays—were selected in a first iteration. For each of them, several features, including size and brightness, were assessed in order to ascertain possible proportional relationships with the rate of consumption. To normalize the comparison between different display types, relative units such as the surface power density and the display frontal intensity efficiency were proposed. -

Technology Brief 6: Display Technologies
106 TECHNOLOGY BRIEF 6: DISPLAY TECHNOLOGIES Technology Brief 6: Display Technologies From cuneiform-marked clay balls to the abacus to today’s digital projection technology, advances in visual displays have accompanied almost every major leap in information technology. While the earliest “modern” computers relied on cathode ray tubes (CRT) to project interactive images, today’s computers can access a wide variety of displays ranging from plasma screens and LED arrays to digital micromirror projectors, electronic ink, and virtual reality interfaces. In this Technology Brief, we will review the major technologies currently available for two-dimensional visual displays. Cathode Ray Tube (CRT) The earliest computers relied on the same technology that made the television possible. In a CRT television or monitor (Fig. TF6-1), an electron gun is placed behind a positively charged glass screen, and a negatively charged electrode (the cathode) is mounted at the input of the electron gun. During operation, the cathode emits streams of electrons into the electron gun. The emitted electron stream is steered onto different parts of the positively charged screen by the electron gun; the direction of the electron stream is controlled by the electric field of the deflecting coils through which the beam passes. The screen is composed of thousands of tiny dots of phosphorescent material arranged in a two-dimensional array. Every time an electron hits a phosphor dot, it glows a specific color (red, blue, or green). A pixel on the screen is composed of phosphors of these three colors. In order to make an image appear to move on the screen, the electron gun constantly steers the electron stream onto different phosphors, lighting them up faster than the eye can detect the changes, and thus, the images appear to move. -
The Digital Micromirror Device a Historic Mechanical Engineering Landmark
Plano, Texas ■ May 1, 2008 The Digital Micromirror Device A Historic Mechanical Engineering Landmark The Beginning of the Digital Micromirror Device In 1977, at Texas Instruments (TI), a small team formed under the direction of Dr. Larry Hornbeck. This group would eventually develop the Digital Micromirror Device (DMD) – an optical micromachine that would power the most versatile display technologies in the world, including pocket projectors weighing less than one pound (0.5 kg) and digital cinema projectors lighting up 70-foot (21.5 m) screens. The artifact being designated as an ASME Historic Mechanical Engineering Landmark is one of the earliest usable digital micromirror devices produced. The innovative pursuit of digital light processing technology began with the invention of the light-manipulating DMD, but success wasn’t achieved instantaneously. Instead, the journey was littered with mistakes, failures and shattered concepts, all fueled by dogged perseverance and sheer determination that refused to quit on an idea destined to revolutionize the television and film industry. As Hornbeck, a noted physicist, would remember, “If you’re afraid you may fail, then your actions may not be as bold, aggressive or creative as you need them to be in order to accomplish your goal. You may play it so conservative you never get there.” Hornbeck and his team were determined to get there. The Digital Micromirror Device – Texas Instruments Incorporated 1 The DMD and the Department of Defense In the mid 1970s, TI worked with the Department of proposed a more easily fabricated hybrid structure, Defense (DoD) to develop charge-coupled-device (CCD) using n-type metal-oxide semiconductor (nMOS) imagers, a light sensitive integrated circuit which converts transistors to control a deformable mirror manufactured a light image into an electronic image. -

Next Gen Projectors Why Choosing Laser Projection Makes Sense for Churches
Next Gen Projectors Why choosing laser projection makes sense for churches Summary Our existing lamp based projector was failing and was not really bright enough to serve our needs as we anticipated transitioning to IMAG (image Projection for use during Sunday morning church made its rather quiet debut magnification), where a pastor’s—or vocalist’s—live image can be projected in the 1980’s. Today, projection has grown to become a multimedia staple of onto a screen to provide an up-close experience for those in more remote the modern worship experience. seating. In the eighties, both slide and overhead projectors provided a way for song In our research to find the best solution we looked at, and priced, three different lyrics to be projected during services. In the nineties the technology graduated options; lamp based projection, LED walls and the latest technology to grace to video projection and the use of PowerPoint software, which ruled the this realm—laser projection. presentation landscape. Our church’s screen is 9’x16,’ and like many churches, we have ambient light In the early 2000’s data projection and the exponential advances of presentation issues to deal with. To make a purchase decision we looked at four areas: life software have made their mark. Now in the second decade of the 2000’s, expectancy, maintenance, initial investment and total cost of ownership. LED walls and laser projection are coming into the forefront of presentation hardware. A Bright New Technology Recently, the church I serve at went through the challenge of purchasing new A benefit of recent advancements is that new technologies bring bright, display equipment. -

The New Infocus® Depthq® 3D Video Projector Affordable
Affordable From the world leader in digital projection. The New InFocus® DepthQ® 3D Video Projector is truly the first of its kind. This affordable, portable 3D projector delivers rock-solid 120hz stereo 3D for a fraction of the cost of other single-lens 3D projectors. The new InFocus®DepthQ® 3D video projector uses the latest Texas Instruments Digital Light Processing™ technology and provides a stunning 2000:1 contrast ratio. Whether in the office, laboratory, boardroom, or game room, the InFocus®DepthQ® projector puts 3D visualization into the hands of the many instead of a privileged few. Affordable – Less than $4,000 - A fraction of the cost of other single-lens 3D projectors Portable – At 6.8 pounds it fits under your arm and takes 5 minutes to set up Quality – Flicker-free, 120hz 3D with DLP TM technology from Texas Instruments Versatile – Watch 3D movies, games, or work “live” First in its class: Lightspeed presents the portable 3D stereo solution. on collaborative CAD visualization The InFocus®DepthQ® 3D video projector is a revolutionary lightweight single lens video projector capable of achieving true output frame rates of 120Hz. Powerful – Produce engaging 3D presentations that When used with a stereoscopic 3D image source and liquid crystal "3D" shutter communicate ideas and produce results glasses, InFocus®DepthQ® will provide a rock-solid stereo 3D experience. Product Design and Engineering Stereo 3D is scientifically proven as the most effective way of communicating visual ideas. Companies recognize this fact and have spent millions of dollars equipping their design InFocus®DepthQ® is exclusively distributed engineers with stereoscopic visualization facilities. -

Front Cover See Separate 4Pp Cover Artwork
FRONT COVER SEE SEPARATE 4PP COVER ARTWORK Corporate and Education solutions range guide February 2018 www.pro.sony.eu The Sony Solution 4-19 The Sony Solution When it comes to professional AV technology, Service & Support 20-21 Sony provides much more than just great products - we create solutions. Education and Business Projectors 22-47 Complete solutions that make visual communications and knowledge sharing even smarter and more efficient. INSIDEINSIDE FRONTFRONT We empower all kinds of organisations with advanced audio-visual Professional Displays 48-53 tools that help them go further. Solutions designed for every industry COVERCOVER SEESEE SEPARATESEPARATE and sector, from schools to universities, small business to big business, retail to automotive and more. 4PP4PPVisual Imaging COVERCOVER Cameras ARTWORKARTWORK54-63 Solutions like our Laser Light Source Projectors that deliver powerful images with virtually no maintenance. Our Collaboration solution that takes active learning and sharing material to new levels. Our BRAVIA Visual Simulation and Visual Entertainment 64-70 Professional Displays that enable dynamic digital signage. And our desktop and portable projectors that provide uncompromised quality with low ownership costs for businesses and education. Whatever size the organisation, whatever the requirement, we have the perfect solution. And always with our full support. For full product features and specifications please visit pro.sony.eu Professional AV technology Sony Solutions Professional AV technology Sony Solutions Green management settings Schedule on and off times to save energy when devices aren’t required, for example at evenings or weekends. Complete device management solution Managing, scheduling and monitoring content TEOS Manage can be controlled by just one person, reducing that’s displayed on all your networked screens and Complete the need for extra staff and giving a single point of contact for projectors can be a challenge for any organisation. -

Information Display • Vol
July-August 17 Cover_SID Cover 6/30/2017 7:52 AM Page 1 FLEXIBLE AND STRETCHABLE TECHNOLOGY July/August 2017 Official Publication of the Society for Information Display • www.informationdisplay.org Vol. 33, No. 4 LEADER IN DISPLAY TEST SYSTEMS A Konica Minolta Company Any way you look at it, your customers expect a fl awless visual experience from their display device. Radiant Vision Systems automated visual inspection solutions help display makers ensure perfect quality, using innovative CCD-based imaging solutions to evaluate uniformity, chromaticity, mura, and defects in today’s advanced display technologies – so every smartphone, wearable, and VR headset delivers a Radiant experience from every angle. Radiant Vision Systems, LLC Global Headquarters - Redmond, WA USA | +1 425 844-0152 | www.RadiantVisionSystems.com | [email protected] ID TOC Issue3 p1_Layout 1 6/30/2017 11:41 AM Page 1 Information SOCIETY FOR INFORMATION DISPLAY SID JULY/AUGUST 2017 DISPLAY VOL. 33, NO. 4 ON THE COVER: Flexible, stretchable technology is the next frontier for the display industry. The schematic image at center left is courtesy of Yongtaek Hong, Seoul National contents University. 2 Editorial: Stretchable Displays, Summer Days n By Stephen P. Atwood 3 Industry News n By Jenny Donelan 4 Guest Editorial: Stretch of Imagination n By Ruiqing (Ray) Ma 6 Frontline Technology: Stretchable Displays: From Concept Toward Reality Stretchable displays are now being developed using strategies involving intrinsically stretchable devices, wrinkled ultra-thin devices, and hybrid-type devices. Cover Design: Acapella Studios, Inc. n Yongtaek Hong, Byeongmoon Lee, Eunho Oh, and Junghwan Byun 12 Frontline Technology: Stretchable Oxide TFT for Wearable Electronics Oxide thin-film transistors (TFTs) in a neutral plane are shown to be robust under mechanical bending and thus can also be suitable for TFT backplanes for stretchable electronics. -
OLED Microdisplays
W575-Templier.qxp_Layout 1 01/07/2014 09:02 Page 1 ELECTRONICS ENGINEERING SERIES We have now embraced the ‘Digital Age’, in which both our François Templier Edited by professional and leisure activities involve more and more communication devices, requiring displays of many types to play an increasing role. Within this context, a growing number of display types and sizes have emerged, currently generating a market in excess of $100 billion, which is in the same order of OLED Microdisplays magnitude as that of the semiconductor industry. Microdisplays, namely displays so small that they require an optical magnification to be seen, have a significant share of this Technology and Applications market. Over the last decade, OLED microdisplays have reached a wide industrial and commercial market and promise to expand further in the digital age, in which they provide unique and unrivalled features for portable and wearable devices in particular. OLED Microdisplays The authors of this book provide a review of the state of the art on OLED microdisplays. All aspects, from theory to application, are addressed in a comprehensive way: basic principles; display design, fabrication, operation and performance; present and future applications. This is of interest to a wide range of readers, from industry professionals (engineers, project managers etc.) engaged in the field of display development/fabrication, through display end-users (integration in display systems) to academic researchers, university lecturers and students. Overall, the book aims to offer easy access to OLED microdisplay details for all readers seeking to further their understanding of the subject. François Templier works at CEA-LETI in Grenoble, France.