18. Standing Waves, Beats, and Group Velocity
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -

Type-I Hyperbolic Metasurfaces for Highly-Squeezed Designer
Type-I hyperbolic metasurfaces for highly-squeezed designer polaritons with negative group velocity Yihao Yang1,2,3,4, Pengfei Qin2, Xiao Lin3, Erping Li2, Zuojia Wang5,*, Baile Zhang3,4,*, and Hongsheng Chen1,2,* 1State Key Laboratory of Modern Optical Instrumentation, College of Information Science and Electronic Engineering, Zhejiang University, Hangzhou 310027, China. 2Key Lab. of Advanced Micro/Nano Electronic Devices & Smart Systems of Zhejiang, The Electromagnetics Academy at Zhejiang University, Zhejiang University, Hangzhou 310027, China. 3Division of Physics and Applied Physics, School of Physical and Mathematical Sciences, Nanyang Technological University, 21 Nanyang Link, Singapore 637371, Singapore. 4Centre for Disruptive Photonic Technologies, The Photonics Institute, Nanyang Technological University, 50 Nanyang Avenue, Singapore 639798, Singapore. 5School of Information Science and Engineering, Shandong University, Qingdao 266237, China *[email protected] (Z.W.); [email protected] (B.Z.); [email protected] (H.C.) Abstract Hyperbolic polaritons in van der Waals materials and metamaterial heterostructures provide unprecedenced control over light-matter interaction at the extreme nanoscale. Here, we propose a concept of type-I hyperbolic metasurface supporting highly-squeezed magnetic designer polaritons, which act as magnetic analogues to hyperbolic polaritons in the hexagonal boron nitride (h-BN) in the first Reststrahlen band. Comparing with the natural h-BN, the size and spacing of the metasurface unit cell can be readily scaled up (or down), allowing for manipulating designer polaritons in frequency and in space at will. Experimental measurements display the cone-like hyperbolic dispersion in the momentum space, associating with an effective refractive index up to 60 and a group velocity down to 1/400 of the light speed in vacuum. -

First-Principles Envelope-Function Theory for Lattice-Matched Semiconductor Heterostructures
PHYSICAL REVIEW B 72, 165345 ͑2005͒ First-principles envelope-function theory for lattice-matched semiconductor heterostructures Bradley A. Foreman* Department of Physics, Hong Kong University of Science and Technology, Clear Water Bay, Kowloon, Hong Kong, China ͑Received 17 June 2005; revised manuscript received 26 August 2005; published 28 October 2005͒ In this paper a multiband envelope-function Hamiltonian for lattice-matched semiconductor heterostructures is derived from first-principles self-consistent norm-conserving pseudopotentials. The theory is applicable to isovalent or heterovalent heterostructures with macroscopically neutral interfaces and no spontaneous bulk polarization. The key assumption—proved in earlier numerical studies—is that the heterostructure can be treated as a weak perturbation with respect to some periodic reference crystal, with the nonlinear response small in comparison to the linear response. Quadratic response theory is then used in conjunction with k·p perturbation theory to develop a multiband effective-mass Hamiltonian ͑for slowly varying envelope functions͒ in which all interface band-mixing effects are determined by the linear response. To within terms of the same order as the position dependence of the effective mass, the quadratic response contributes only a bulk band offset term and an interface dipole term, both of which are diagonal in the effective-mass Hamiltonian. The interface band mixing is therefore described by a set of bulklike parameters modulated by a structure factor that determines the distribution of atoms in the heterostructure. The same linear parameters determine the interface band-mixing Hamiltonian for slowly varying and ͑sufficiently large͒ abrupt heterostructures of arbitrary shape and orientation. Long-range multipole Coulomb fields arise in quantum wires or dots, but have no qualitative effect in two-dimensional systems beyond a dipole contribution to the band offsets. -

Frequency Response = K − Ml
Frequency Response 1. Introduction We will examine the response of a second order linear constant coefficient system to a sinusoidal input. We will pay special attention to the way the output changes as the frequency of the input changes. This is what we mean by the frequency response of the system. In particular, we will look at the amplitude response and the phase response; that is, the amplitude and phase lag of the system’s output considered as functions of the input frequency. In O.4 the Exponential Input Theorem was used to find a particular solution in the case of exponential or sinusoidal input. Here we will work out in detail the formulas for a second order system. We will then interpret these formulas as the frequency response of a mechanical system. In particular, we will look at damped-spring-mass systems. We will study carefully two cases: first, when the mass is driven by pushing on the spring and second, when the mass is driven by pushing on the dashpot. Both these systems have the same form p(D)x = q(t), but their amplitude responses are very different. This is because, as we will see, it can make physical sense to designate something other than q(t) as the input. For example, in the system mx0 + bx0 + kx = by0 we will consider y to be the input. (Of course, y is related to the expression on the right- hand-side of the equation, but it is not exactly the same.) 2. Sinusoidally Driven Systems: Second Order Constant Coefficient DE’s We start with the second order linear constant coefficient (CC) DE, which as we’ve seen can be interpreted as modeling a damped forced harmonic oscillator. -

Group Velocity
Particle Waves and Group Velocity Particles with known energy Consider a particle with mass m, traveling in the +x direction and known velocity 1 vo and energy Eo = mvo . The wavefunction that represents this particle is: 2 !(x,t) = Ce jkxe" j#t [1] where C is a constant and 2! 1 ko = = 2mEo [2] "o ! Eo !o = 2"#o = [3] ! 2 The envelope !(x,t) of this wavefunction is 2 2 !(x,t) = C , which is a constant. This means that when a particle’s energy is known exactly, it’s position is completely unknown. This is consistent with the Heisenberg Uncertainty principle. Even though the magnitude of this wave function is a constant with respect to both position and time, its phase is not. As with any type of wavefunction, the phase velocity vp of this wavefunction is: ! E / ! v v = = o = E / 2m = v2 / 4 = o [4] p k 1 o o 2 2mEo ! At first glance, this result seems wrong, since we started with the assumption that the particle is moving at velocity vo. However, only the magnitude of a wavefunction contains measurable information, so there is no reason to believe that its phase velocity is the same as the particle’s velocity. Particles with uncertain energy A more realistic situation is when there is at least some uncertainly about the particle’s energy and momentum. For real situations, a particle’s energy will be known to lie only within some band of uncertainly. This can be handled by assuming that the particle’s wavefunction is the superposition of a range of constant-energy wavefunctions: jkn x # j$nt !(x,t) = "Cn (e e ) [5] n Here, each value of kn and ωn correspond to energy En, and Cn is the probability that the particle has energy En. -

Photons That Travel in Free Space Slower Than the Speed of Light Authors
Title: Photons that travel in free space slower than the speed of light Authors: Daniel Giovannini1†, Jacquiline Romero1†, Václav Potoček1, Gergely Ferenczi1, Fiona Speirits1, Stephen M. Barnett1, Daniele Faccio2, Miles J. Padgett1* Affiliations: 1 School of Physics and Astronomy, SUPA, University of Glasgow, Glasgow G12 8QQ, UK 2 School of Engineering and Physical Sciences, SUPA, Heriot-Watt University, Edinburgh EH14 4AS, UK † These authors contributed equally to this work. * Correspondence to: [email protected] Abstract: That the speed of light in free space is constant is a cornerstone of modern physics. However, light beams have finite transverse size, which leads to a modification of their wavevectors resulting in a change to their phase and group velocities. We study the group velocity of single photons by measuring a change in their arrival time that results from changing the beam’s transverse spatial structure. Using time-correlated photon pairs we show a reduction of the group velocity of photons in both a Bessel beam and photons in a focused Gaussian beam. In both cases, the delay is several microns over a propagation distance of the order of 1 m. Our work highlights that, even in free space, the invariance of the speed of light only applies to plane waves. Introducing spatial structure to an optical beam, even for a single photon, reduces the group velocity of the light by a readily measurable amount. One sentence summary: The group velocity of light in free space is reduced by controlling the transverse spatial structure of the light beam. Main text The speed of light is trivially given as �/�, where � is the speed of light in free space and � is the refractive index of the medium. -

Multidisciplinary Design Project Engineering Dictionary Version 0.0.2
Multidisciplinary Design Project Engineering Dictionary Version 0.0.2 February 15, 2006 . DRAFT Cambridge-MIT Institute Multidisciplinary Design Project This Dictionary/Glossary of Engineering terms has been compiled to compliment the work developed as part of the Multi-disciplinary Design Project (MDP), which is a programme to develop teaching material and kits to aid the running of mechtronics projects in Universities and Schools. The project is being carried out with support from the Cambridge-MIT Institute undergraduate teaching programe. For more information about the project please visit the MDP website at http://www-mdp.eng.cam.ac.uk or contact Dr. Peter Long Prof. Alex Slocum Cambridge University Engineering Department Massachusetts Institute of Technology Trumpington Street, 77 Massachusetts Ave. Cambridge. Cambridge MA 02139-4307 CB2 1PZ. USA e-mail: [email protected] e-mail: [email protected] tel: +44 (0) 1223 332779 tel: +1 617 253 0012 For information about the CMI initiative please see Cambridge-MIT Institute website :- http://www.cambridge-mit.org CMI CMI, University of Cambridge Massachusetts Institute of Technology 10 Miller’s Yard, 77 Massachusetts Ave. Mill Lane, Cambridge MA 02139-4307 Cambridge. CB2 1RQ. USA tel: +44 (0) 1223 327207 tel. +1 617 253 7732 fax: +44 (0) 1223 765891 fax. +1 617 258 8539 . DRAFT 2 CMI-MDP Programme 1 Introduction This dictionary/glossary has not been developed as a definative work but as a useful reference book for engi- neering students to search when looking for the meaning of a word/phrase. It has been compiled from a number of existing glossaries together with a number of local additions. -
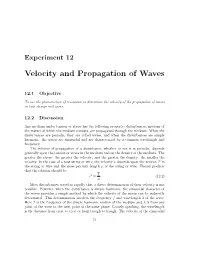
Experiment 12
Experiment 12 Velocity and Propagation of Waves 12.1 Objective To use the phenomenon of resonance to determine the velocity of the propagation of waves in taut strings and wires. 12.2 Discussion Any medium under tension or stress has the following property: disturbances, motions of the matter of which the medium consists, are propagated through the medium. When the disturbances are periodic, they are called waves, and when the disturbances are simple harmonic, the waves are sinusoidal and are characterized by a common wavelength and frequency. The velocity of propagation of a disturbance, whether or not it is periodic, depends generally upon the tension or stress in the medium and on the density of the medium. The greater the stress: the greater the velocity; and the greater the density: the smaller the velocity. In the case of a taut string or wire, the velocity v depends upon the tension T in the string or wire and the mass per unit length µ of the string or wire. Theory predicts that the relation should be T v2 = (12.1) µ Most disturbances travel so rapidly that a direct determination of their velocity is not possible. However, when the disturbance is simple harmonic, the sinusoidal character of the waves provides a simple method by which the velocity of the waves can be indirectly determined. This determination involves the frequency f and wavelength λ of the wave. Here f is the frequency of the simple harmonic motion of the medium and λ is from any point of the wave to the next point of the same phase. -

Phase and Group Velocity
Assignment 4 PHSGCOR04T Sound Model Questions & Answers Phase and Group velocity Department of Physics, Hiralal Mazumdar Memorial College For Women, Dakshineswar Course Prepared by Parthapratim Pradhan 60 Lectures ≡ 4 Credits April 14, 2020 1. Define phase velocity and group velocity. We know that a traveling wave or a progressive wave propagated through a medium in a +ve x direction with a velocity v, amplitude a and wavelength λ is described by 2π y = a sin (vt − x) (1) λ If n be the frequency of the wave, then wave velocity v = nλ in this situation the traveling wave can be written as 2π x y = a sin (nλt − x)= a sin 2π(nt − ) (2) λ λ This can be rewritten as 2π y = a sin (2πnt − x) (3) λ = a sin (ωt − kx) (4) 2π 2π where ω = T = 2πn is called angular frequency of the wave and k = λ is called propagation constant or wave vector. This is simply a traveling wave equation. The Eq. (4) implies that the phase (ωt − kx) of the wave is constant. Thus ωt − kx = constant Differentiating with respect to t, we find dx dx ω ω − k = 0 ⇒ = dt dt k This velocity is called as phase velocity (vp). Thus it is defined as the ratio between the frequency and the wavelength of a monochromatic wave. dx ω 2πn λ vp = = = 2π = nλ = = v dt k λ T This means that for a monochromatic wave Phase velocity=Wave velocity 1 Where as the group velocity is defined as the ratio between the change in frequency and change in wavelength of a wavegroup or wave packet dω ∆ω ω1 − ω2 vg = = = dk ∆k k1 − k2 of two traveling wave described by the equations y1 = a sin (ω1 t − k1 x)and y2 = a sin (ω2 t − k2 x). -

Theory and Application of SBS-Based Group Velocity Manipulation in Optical Fiber
Theory and Application of SBS-based Group Velocity Manipulation in Optical Fiber by Yunhui Zhu Department of Physics Duke University Date: Approved: Daniel J. Gauthier, Advisor Henry Greenside Jungsang Kim Haiyan Gao David Skatrud Dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Department of Physics in the Graduate School of Duke University 2013 ABSTRACT (Physics) Theory and Application of SBS-based Group Velocity Manipulation in Optical Fiber by Yunhui Zhu Department of Physics Duke University Date: Approved: Daniel J. Gauthier, Advisor Henry Greenside Jungsang Kim Haiyan Gao David Skatrud An abstract of a dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Department of Physics in the Graduate School of Duke University 2013 Copyright c 2013 by Yunhui Zhu All rights reserved Abstract All-optical devices have attracted many research interests due to their ultimately low heat dissipation compared to conventional devices based on electric-optical conver- sion. With recent advances in nonlinear optics, it is now possible to design the optical properties of a medium via all-optical nonlinear effects in a table-top device or even on a chip. In this thesis, I realize all-optical control of the optical group velocity using the nonlinear process of stimulated Brillouin scattering (SBS) in optical fibers. The SBS- based techniques generally require very low pump power and offer a wide transparent window and a large tunable range. Moreover, my invention of the arbitrary SBS res- onance tailoring technique enables engineering of the optical properties to optimize desired function performance, which has made the SBS techniques particularly widely adapted for various applications. -
Laser Envelope Model In
Laser Envelope model in Maison de la Simulation Francesco– March 2019 Massimo Francesco Massimo Outline I. Motivations II. Modeling Laser Wakefield Acceleration with a laser envelope III. Case study: Laser Wakefield Acceleration with external injection IV. Perspectives and future developments Laser Wakefield Acceleration (LWFA): Characteristic Scales 1.5 Laser Beam Duration: 28 fs Transverse 1.2 Electric Field Ponderomotive (A.U.) Force: 0.9 F= - ILaser 0.6 Electrons Immobile Ions Mi >>me 0.003 Plasma density: 3.1018 cm-3 0.002 Electron Charge Density Plasma 0.001 (A.U.) wavelength: ~20 μm 0.000 Laser Wakefield Acceleration (LWFA): Characteristic Scales E > 100 GV/m 0.04 Longitudinal Electric Field Electrons 0.00 (A.U.) injected here on propagation axis are accelerated -0.04 0.003 Laser wavelength: Electron ~1 μm 0.002 Charge Laser duration ~ Density Plasma wavelength: 0.001 (A.U.) ~20 μm 0.000 0.000 LWFA PIC simulations are cumbersome X. Davoine, Physics of Plasmas 15, 113102 (2008) 2D cartesian simulations are not accurate enough for LWFA! 3D LWFA simulations: 1 mm plasma ~ 320 kcpu-heures ~ 10.2 k€ Laser Envelopes need less sampling points Spatial variation scales: Laser Envelope Laser length ~ Plasma wavelength (10-100 μm) Laser wavelength Laser “Standard” (~1 μm) Points sampling Laser “Standard” = 10 Points sampling Laser Envelope Larger Δx and Δt can be used! Structure of a PIC code with Laser Envelope Standard PIC Envelope (/Ponderomotive) PIC ~ E, B field E,B field Envelope A (laser) (plasma fields+laser fields) (plasma fields) Lorentz Lorentz Force Ponderomotive Force Force Plasma Current Current Density J Density J Susceptibility Particles Particles The Laser Envelope evolution: wave equation D. -

Chapter 5 Waves I: Generalities, Superposition & Standing Waves
Chapter 5 Waves I: Generalities, Superposition & Standing Waves 5.1 The Important Stuff 5.1.1 Wave Motion Wave motion occurs when the mass elements of a medium such as a taut string or the surface of a liquid make relatively small oscillatory motions but collectively give a pattern which travels for long distances. This kind of motion also includes the phenomenon of sound, where the molecules in the air around us make small oscillations but collectively give a disturbance which can travel the length of a college classroom, all the way to the students dozing in the back. We can even view the up–and–down motion of inebriated spectators of sports events as wave motion, since their small individual motions give rise to a disturbance which travels around a stadium. The mathematics of wave motion also has application to electromagnetic waves (including visible light), though the physical origin of those traveling disturbances is quite different from the mechanical waves we study in this chapter; so we will hold off on studying electromagnetic waves until we study electricity and magnetism in the second semester of our physics course. Obviously, wave motion is of great importance in physics and engineering. 5.1.2 Types of Waves In some types of wave motion the motion of the elements of the medium is (for the most part) perpendicular to the motion of the traveling disturbance. This is true for waves on a string and for the people–wave which travels around a stadium. Such a wave is called a transverse wave. This type of wave is the easiest to visualize.