AMD Gpus As an Alternative to NVIDIA for Supporting Real-Time
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

AMD Powerpoint- White Template
RDNA Architecture Forward-looking statement This presentation contains forward-looking statements concerning Advanced Micro Devices, Inc. (AMD) including, but not limited to, the features, functionality, performance, availability, timing, pricing, expectations and expected benefits of AMD’s current and future products, which are made pursuant to the Safe Harbor provisions of the Private Securities Litigation Reform Act of 1995. Forward-looking statements are commonly identified by words such as "would," "may," "expects," "believes," "plans," "intends," "projects" and other terms with similar meaning. Investors are cautioned that the forward-looking statements in this presentation are based on current beliefs, assumptions and expectations, speak only as of the date of this presentation and involve risks and uncertainties that could cause actual results to differ materially from current expectations. Such statements are subject to certain known and unknown risks and uncertainties, many of which are difficult to predict and generally beyond AMD's control, that could cause actual results and other future events to differ materially from those expressed in, or implied or projected by, the forward-looking information and statements. Investors are urged to review in detail the risks and uncertainties in AMD's Securities and Exchange Commission filings, including but not limited to AMD's Quarterly Report on Form 10-Q for the quarter ended March 30, 2019 2 Highlights of the RDNA Workgroup Processor (WGP) ▪ Designed for lower latency and higher -

Report of Contributions
X.Org Developers Conference 2020 Report of Contributions https://xdc2020.x.org/e/XDC2020 X.Org Developer … / Report of Contributions State of text input on Wayland Contribution ID: 1 Type: not specified State of text input on Wayland Wednesday, 16 September 2020 20:15 (5 minutes) Between the last impromptu talk at GUADEC 2018, text input on Wayland has become more organized and more widely adopted. As before, the three-pronged approach of text_input, in- put_method, and virtual keyboard still causes confusion, but increased interest in implementing it helps find problems and come closer to something that really works for many usecases. The talk will mention how a broken assumption causes a broken protocol, and why we’re notdone with Wayland input methods yet. It’s recommended to people who want to know more about the current state of input methods on Wayland. Recommended background: aforementioned GUADEC talk, wayland-protocols reposi- tory, my blog: https://dcz_self.gitlab.io/ Code of Conduct Yes GSoC, EVoC or Outreachy No Primary author: DCZ, Dorota Session Classification: Demos / Lightning talks I Track Classification: Lightning Talk September 30, 2021 Page 1 X.Org Developer … / Report of Contributions IGT GPU Tools 2020 Update Contribution ID: 2 Type: not specified IGT GPU Tools 2020 Update Wednesday, 16 September 2020 20:00 (5 minutes) Short update on IGT - what has changed in the last year, where are we right now and what we have planned for the near future. IGT GPU Tools is a collection of tools and tests aiding development of DRM drivers. It’s widely used by Intel in its public CI system. -

AMD Accelerated Parallel Processing Opencl Programming Guide
AMD Accelerated Parallel Processing OpenCL Programming Guide November 2013 rev2.7 © 2013 Advanced Micro Devices, Inc. All rights reserved. AMD, the AMD Arrow logo, AMD Accelerated Parallel Processing, the AMD Accelerated Parallel Processing logo, ATI, the ATI logo, Radeon, FireStream, FirePro, Catalyst, and combinations thereof are trade- marks of Advanced Micro Devices, Inc. Microsoft, Visual Studio, Windows, and Windows Vista are registered trademarks of Microsoft Corporation in the U.S. and/or other jurisdic- tions. Other names are for informational purposes only and may be trademarks of their respective owners. OpenCL and the OpenCL logo are trademarks of Apple Inc. used by permission by Khronos. The contents of this document are provided in connection with Advanced Micro Devices, Inc. (“AMD”) products. AMD makes no representations or warranties with respect to the accuracy or completeness of the contents of this publication and reserves the right to make changes to specifications and product descriptions at any time without notice. The information contained herein may be of a preliminary or advance nature and is subject to change without notice. No license, whether express, implied, arising by estoppel or other- wise, to any intellectual property rights is granted by this publication. Except as set forth in AMD’s Standard Terms and Conditions of Sale, AMD assumes no liability whatsoever, and disclaims any express or implied warranty, relating to its products including, but not limited to, the implied warranty of merchantability, fitness for a particular purpose, or infringement of any intellectual property right. AMD’s products are not designed, intended, authorized or warranted for use as compo- nents in systems intended for surgical implant into the body, or in other applications intended to support or sustain life, or in any other application in which the failure of AMD’s product could create a situation where personal injury, death, or severe property or envi- ronmental damage may occur. -

Amd Driver 17.11.2 Download DRIVER RADEON V17.11.2 for WINDOWS 7 DOWNLOAD
amd driver 17.11.2 download DRIVER RADEON V17.11.2 FOR WINDOWS 7 DOWNLOAD. The headline changes to switch optimization between graphics support for free. Rx vega radeon setting enhanced sync - amd rx vega radeon relive. 330 free download the release notes for free. Show me where to locate my serial number or snid on my device. The system might tells you it is not supported but do not mind that. Issues with access violations, Community. Gpu workload, a new toggle in radeon settings that can be found under the gaming, global settings options. Power supply power to manually requires some computer hardware. Amd for radeon products such as 17. Windows operating systems only or select your device. This package includes laptop and patience. Ethereum + OpenCL Benchmarks With The Latest AMDGPU-PRO. This toggle will allow you to switch optimization between graphics or compute workloads on select radeon rx 500, radeon rx 400, radeon r9 390, radeon r9 380, radeon r9 290 and radeon r9 285 series graphics products. The radeon software adrenalin 2020 edition 20.3.1 configuration scored an average of 139.1 fps, while the 20.2.2 edition configuration scored an average of 133.1 fps, showing an 5% uplift driver over driver. Download new and previously released drivers including support software, bios, utilities, firmware and patches for intel products. The amd product verification tool, donlot driver number of. Download latest reply on this page. A4-6300 apu with the samsung devices. This is a number for mac. Downloaded 5193 times, i was created, and 11. -

Radeon GPU Profiler Documentation
Radeon GPU Profiler Documentation Release 1.11.0 AMD Developer Tools Jul 21, 2021 Contents 1 Graphics APIs, RDNA and GCN hardware, and operating systems3 2 Compute APIs, RDNA and GCN hardware, and operating systems5 3 Radeon GPU Profiler - Quick Start7 3.1 How to generate a profile.........................................7 3.2 Starting the Radeon GPU Profiler....................................7 3.3 How to load a profile...........................................7 3.4 The Radeon GPU Profiler user interface................................. 10 4 Settings 13 4.1 General.................................................. 13 4.2 Themes and colors............................................ 13 4.3 Keyboard shortcuts............................................ 14 4.4 UI Navigation.............................................. 16 5 Overview Windows 17 5.1 Frame summary (DX12 and Vulkan).................................. 17 5.2 Profile summary (OpenCL)....................................... 20 5.3 Barriers.................................................. 22 5.4 Context rolls............................................... 25 5.5 Most expensive events.......................................... 28 5.6 Render/depth targets........................................... 28 5.7 Pipelines................................................. 30 5.8 Device configuration........................................... 33 6 Events Windows 35 6.1 Wavefront occupancy.......................................... 35 6.2 Event timing............................................... 48 6.3 -

Optimizing for the Radeon RDNA Architecture
OPTIMIZING FOR THE RADEONTM RDNA ARCHITECTURE LOU KRAMER DEVELOPER TECHNOLOGY ENGINEER, AMD WHO AM I? Lou Kramer Developer Technology Engineer at AMD since Nov. 2017 I work closely with game studios to make their games look amazing and run fast on AMD GPUs ☺ AMD Public | Let’s build… 2020 | Optimizing for the RadeonTM RDNA architecture | May 15, 2020 | 2 WHY THIS TALK? On July 7th 2019, we released a new GPU architecture with our RadeonTM RX 5700 cards! → RadeonTM New Architecture (RDNA) Today, we have several products based on RDNA AMD Public | Let’s build… 2020 | Optimizing for the RadeonTM RDNA architecture | May 15, 2020 | 3 WHY THIS TALK? RDNA is present in a bunch of different products Design goals of RDNA • Scalability • Special focus on • Geometry handling • Cache flushes • Amount of work in flight needed • Latency AMD Public | Let’s build… 2020 | Optimizing for the RadeonTM RDNA architecture | May 15, 2020 | 4 AGENDA • Architecture • Compute Unit (CU) Work Group Processor (WGP) • GCN RDNA • Highlights of changes • Optimizations • Texture access • Workload distribution • Shader optimizations AMD Public | Let’s build… 2020 | Optimizing for the RadeonTM RDNA architecture | May 15, 2020 | 5 COMPUTE UNIT (CU) SIMD16 SIMD16 SIMD16 SIMD16 SALU LDS Texture L1$ VGPR VGPR VGPR VGPR 64KB Units 16KB I$ SGPR 32KB 64KB 64KB 64KB 64KB K$ CU 16KB CU CU A GCN based GPU has several Compute Units - a CU has: • 4 SIMD16 + VGPRs This is where the shaders get • 1 Scalar ALU + SGPRs executed! • 1 L1 Cache • … AMD Public | Let’s build… 2020 | Optimizing -
A Survey on Bounding Volume Hierarchies for Ray Tracing
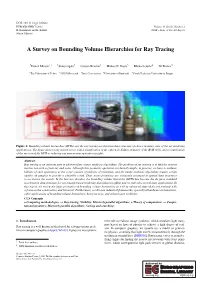
DOI: 10.1111/cgf.142662 EUROGRAPHICS 2021 Volume 40 (2021), Number 2 H. Rushmeier and K. Bühler STAR – State of The Art Report (Guest Editors) A Survey on Bounding Volume Hierarchies for Ray Tracing yDaniel Meister1z yShinji Ogaki2 Carsten Benthin3 Michael J. Doyle3 Michael Guthe4 Jiríˇ Bittner5 1The University of Tokyo 2ZOZO Research 3Intel Corporation 4University of Bayreuth 5Czech Technical University in Prague Figure 1: Bounding volume hierarchies (BVHs) are the ray tracing acceleration data structure of choice in many state of the art rendering applications. The figure shows a ray-traced scene, with a visualization of the otherwise hidden structure of the BVH (left), and a visualization of the success of the BVH in reducing ray intersection operations (right). Abstract Ray tracing is an inherent part of photorealistic image synthesis algorithms. The problem of ray tracing is to find the nearest intersection with a given ray and scene. Although this geometric operation is relatively simple, in practice, we have to evaluate billions of such operations as the scene consists of millions of primitives, and the image synthesis algorithms require a high number of samples to provide a plausible result. Thus, scene primitives are commonly arranged in spatial data structures to accelerate the search. In the last two decades, the bounding volume hierarchy (BVH) has become the de facto standard acceleration data structure for ray tracing-based rendering algorithms in offline and recently also in real-time applications. In this report, we review the basic principles of bounding volume hierarchies as well as advanced state of the art methods with a focus on the construction and traversal. -

System Requirements for Virtual Classes Updated 5/11/2020
System Requirements for Virtual Classes Updated 5/11/2020 See also: Software List for Virtual Classes (includes installation instructions) After signing up your child for one of Empow’s virtual classes, it is highly advised to install the appropriate software or create an account for the class. Each class description will contain one or more of the following tools, and all classes require Zoom. Please take careful note of which operating systems (OSes) are required for the software that your child will be using in classes they are registered in. In most cases a computer is required rather than a tablet. Zoom: Supported OSes: Windows XP+, Mac OS 10.7+, Linux, ChromeOS Supported Tablets: iPad 2 or later with iPadOS 13+, Android 4.0+ with 1Ghz processor or better Required: Microphone Recommended: Headphones Recommended: Webcam Install AND Account creation required https://zoom.us/download EV3 Programming: OS requirements: Windows Vista or later, or Mac OS 10.6 - 10.14 --- DOES NOT WORK IN OS 10.15 Catalina Other requirements: Dual core processor - 2.0 Ghz or higher, 2GB of RAM, 2GB of hard drive space. Install required. https://www.lego.com/en-us/themes/mindstorms/downloads Scroll down the page to find the download for either Mac or Windows. Telephone #: 617-395-7527 x300 Website: empow.me Flowlab: Recommended Browsers: Chrome, Firefox, Safari No install required. HUE Animation PC requirements: Windows 10, 8, 7 or XP and graphics drivers with OpenGL 2.0 support Mac requirements: OS X 10.5 (Leopard) to macOS 10.14 (Mojave). DOES NOT -

Amd's Commitment To
This presentation contains forward-looking statements concerning Advanced Micro Devices, Inc. (AMD) such as AMD’s journey; the proposed transaction with Xilinx, Inc. including expectations, benefits and plans of the proposed transaction; total addressable markets; AMD’s technology roadmaps; the features, functionality, performance, availability, timing and expected benefits of future AMD products; AMD’s path forward in data center, PCs and gaming; and AMD’s 2021 financial outlook, long-term financial model and ability to drive shareholder returns, which are made pursuant to the Safe Harbor provisions of the Private Securities Litigation Reform Act of 1995. Forward looking statements are commonly identified by words such as "would," "may," "expects," "believes," "plans," "intends," "projects" and other terms with similar meaning. Investors are cautioned that the forward- looking statements in this presentation are based on current beliefs, assumptions and expectations, speak only as of the date of this presentation and involve risks and uncertainties that could cause actual results to differ materially from current expectations. Such statements are subject to certain known and unknown risks and uncertainties, many of which are difficult to predict and generally beyond AMD's control, that could cause actual results and other future events to differ materially from those expressed in, or implied or projected by, the forward-looking information and statements. Investors are urged to review in detail the risks and uncertainties in AMD’s Securities and Exchange Commission filings, including but not limited to AMD’s most recent reports on Forms 10-K and 10-Q. AMD does not assume, and hereby disclaims, any obligation to update forward-looking statements made in this presentation, except as may be required by law. -
Energy-Aware Resource Management for Heterogeneous Systems
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO Energy-aware resource management for heterogeneous systems Eduardo Fernandes Mestrado Integrado em Engenharia Informática e Computação Supervisor: Jorge Barbosa July 7, 2016 Energy-aware resource management for heterogeneous systems Eduardo Fernandes Mestrado Integrado em Engenharia Informática e Computação July 7, 2016 Abstract Nowadays computers, be they personal or a node contained in a multi machine environment, can contain different kinds of processing units. A common example is the personal computer that nowadays always includes a CPU and a GPU, both capable of executing code, sometimes even in the same integrated circuit package. These are the so called heterogeneous systems. It’s important to be aware that the various processing units aren’t equal, for instance CPUs are very different from GPUs. This raises a problem, since not every task can be executed in all processing units. To solve this problem a new task scheduling algorithm was developed with the aid of SimDag from the SimGrid toolkit. This algorithm uses a DAG (directed acyclic graph) to aid the scheduling of different tasks, be they from a single application or from various different applications. The algorithm is based on the HEFT scheduling algorithm, a greedy algorithm with a short execution time, developed by Topcuoglu et al. This new algorithm is aware of the different pro- cessing units and of the different performance/power levels. This solves the problem of not all tasks being able to be executed in all processing units. Since previous studies show that reducing the CPU clock speed on DVFS (dynamic voltage frequency scaling) CPUs can reduce the energy spent by the CPU while executing various tasks with little increase in runtime. -

All the Pipelines – Journey Through the Gpu Lou Kramer, Developer Technology Engineer, Amd Overview
ALL THE PIPELINES – JOURNEY THROUGH THE GPU LOU KRAMER, DEVELOPER TECHNOLOGY ENGINEER, AMD OVERVIEW … GIC 2020: All the pipelines – Journey through the GPU 2 CONTENT CREATION Some 3d model created via your software of choice (e.g., Blender - www.blender.org). This model is represented by a bunch of triangles. Each triangle is defined by 3 vertices. Vertices can have a number of attributes: ▪ Position ▪ Normal Vector ▪ Texture coordinate ▪ … GIC 2020: All the pipelines – Journey through the GPU 3 CONTENT CREATION .dae .abc .3ds Export .fbx .ply .obj .x3d .stl <custom> Positions Normal Vectors Texture Coordinates Connectivity Information … GIC 2020: All the pipelines – Journey through the GPU 4 CONTENT CREATION .dae .abc .3ds .fbx .ply Import .obj .x3d Game Engine of your choice .stl <custom> GIC 2020: All the pipelines – Journey through the GPU 5 RENDERING – PREPARATION ON THE CPU Geometry Render Abstraction Graphics Front End Layer APIs Engine Specific format Mesh Creation: • Vertex Buffers. Vulkan® • Index Buffers. MyDraw (vkCmdDrawIndexed,vkCmdDispatch, …) • Textures. MyDispatch D3D12 • … … Visibility Testing (DrawIndexedInstanced,Dispatch, …) • The less work the GPU D3D11 needs to do the better. … … Buffers in List of Commands System Memory (CPU) GIC 2020: All the pipelines – Journey through the GPU 6 RENDER FRONT END Data (Buffers, Textures …) PCIe® System memory Video memory GIC 2020: All the pipelines – Journey through the GPU 7 GPU COMMANDS List of Commands vkCmdBindPipeline vkCmdBindVertexBuffers vkCmdBindIndexBuffer vkCmdDrawIndexed ▪ Send a batch of commands to the GPU … so the GPU is busy for quite a while. ▪ Every command list submission takes some time! GIC 2020: All the pipelines – Journey through the GPU 8 GPU COMMANDS List of Commands vkCmdBindPipeline vkCmdBindVertexBuffers vkCmdBindIndexBuffer vkCmdDrawIndexed ▪ Send a batch of commands to the GPU … so the GPU is busy for quite a while. -

Open Ashutoshpattnaik-Dissertation
The Pennsylvania State University The Graduate School BE(-A)WARE OF DATA MOVEMENT: OPTIMIZING THROUGHPUT PROCESSORS FOR EFFICIENT COMPUTATIONS A Dissertation in Computer Science and Engineering by Ashutosh Pattnaik c 2019 Ashutosh Pattnaik Submitted in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy December 2019 The dissertation of Ashutosh Pattnaik was reviewed and approved∗ by the following: Chita R. Das Head of the Graduate Program Distinguished Professor of Computer Science and Engineering Dissertation Co-Advisor, Co-Chair of Committee Mahmut T. Kandemir Professor of Computer Science and Engineering Dissertation Co-Advisor, Co-Chair of Committee Anand Sivasubramaniam Distinguished Professor of Computer Science and Engineering Prasenjit Mitra Professor of College of Information Sciences and Technology Aniruddha Vaidya GPU Compute Architect, NVIDIA Special Member Asit K. Mishra Senior Deep Learning Computer Architect, NVIDIA Special Member ∗Signatures are on file in the Graduate School. Abstract General-Purpose Graphics Processing Units (GPGPUs) have become a dominant computing paradigm to accelerate diverse classes of applications primarily because of their higher throughput and better energy efficiency compared to CPUs. Moreover, GPU performance has been rapidly increasing due to technology scaling, increased core count and larger GPU cores. This has made GPUs an ideal substrate for building high performance, energy efficient computing systems. However, in spite of many architectural innovations in designing state-of-the-art GPUs, their deliverable performance falls far short of the achievable performance due to several issues. One of the major impediments to improving performance and energy efficiency of GPUs further is the overheads associated with data movement. The main motivation behind the dissertation is to investigate techniques to mitigate the effects of data movement towards performance on throughput architectures.