Open Ashutoshpattnaik-Dissertation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

AMD Powerpoint- White Template
RDNA Architecture Forward-looking statement This presentation contains forward-looking statements concerning Advanced Micro Devices, Inc. (AMD) including, but not limited to, the features, functionality, performance, availability, timing, pricing, expectations and expected benefits of AMD’s current and future products, which are made pursuant to the Safe Harbor provisions of the Private Securities Litigation Reform Act of 1995. Forward-looking statements are commonly identified by words such as "would," "may," "expects," "believes," "plans," "intends," "projects" and other terms with similar meaning. Investors are cautioned that the forward-looking statements in this presentation are based on current beliefs, assumptions and expectations, speak only as of the date of this presentation and involve risks and uncertainties that could cause actual results to differ materially from current expectations. Such statements are subject to certain known and unknown risks and uncertainties, many of which are difficult to predict and generally beyond AMD's control, that could cause actual results and other future events to differ materially from those expressed in, or implied or projected by, the forward-looking information and statements. Investors are urged to review in detail the risks and uncertainties in AMD's Securities and Exchange Commission filings, including but not limited to AMD's Quarterly Report on Form 10-Q for the quarter ended March 30, 2019 2 Highlights of the RDNA Workgroup Processor (WGP) ▪ Designed for lower latency and higher -

Report of Contributions
X.Org Developers Conference 2020 Report of Contributions https://xdc2020.x.org/e/XDC2020 X.Org Developer … / Report of Contributions State of text input on Wayland Contribution ID: 1 Type: not specified State of text input on Wayland Wednesday, 16 September 2020 20:15 (5 minutes) Between the last impromptu talk at GUADEC 2018, text input on Wayland has become more organized and more widely adopted. As before, the three-pronged approach of text_input, in- put_method, and virtual keyboard still causes confusion, but increased interest in implementing it helps find problems and come closer to something that really works for many usecases. The talk will mention how a broken assumption causes a broken protocol, and why we’re notdone with Wayland input methods yet. It’s recommended to people who want to know more about the current state of input methods on Wayland. Recommended background: aforementioned GUADEC talk, wayland-protocols reposi- tory, my blog: https://dcz_self.gitlab.io/ Code of Conduct Yes GSoC, EVoC or Outreachy No Primary author: DCZ, Dorota Session Classification: Demos / Lightning talks I Track Classification: Lightning Talk September 30, 2021 Page 1 X.Org Developer … / Report of Contributions IGT GPU Tools 2020 Update Contribution ID: 2 Type: not specified IGT GPU Tools 2020 Update Wednesday, 16 September 2020 20:00 (5 minutes) Short update on IGT - what has changed in the last year, where are we right now and what we have planned for the near future. IGT GPU Tools is a collection of tools and tests aiding development of DRM drivers. It’s widely used by Intel in its public CI system. -

Radeon GPU Profiler Documentation
Radeon GPU Profiler Documentation Release 1.11.0 AMD Developer Tools Jul 21, 2021 Contents 1 Graphics APIs, RDNA and GCN hardware, and operating systems3 2 Compute APIs, RDNA and GCN hardware, and operating systems5 3 Radeon GPU Profiler - Quick Start7 3.1 How to generate a profile.........................................7 3.2 Starting the Radeon GPU Profiler....................................7 3.3 How to load a profile...........................................7 3.4 The Radeon GPU Profiler user interface................................. 10 4 Settings 13 4.1 General.................................................. 13 4.2 Themes and colors............................................ 13 4.3 Keyboard shortcuts............................................ 14 4.4 UI Navigation.............................................. 16 5 Overview Windows 17 5.1 Frame summary (DX12 and Vulkan).................................. 17 5.2 Profile summary (OpenCL)....................................... 20 5.3 Barriers.................................................. 22 5.4 Context rolls............................................... 25 5.5 Most expensive events.......................................... 28 5.6 Render/depth targets........................................... 28 5.7 Pipelines................................................. 30 5.8 Device configuration........................................... 33 6 Events Windows 35 6.1 Wavefront occupancy.......................................... 35 6.2 Event timing............................................... 48 6.3 -

Optimizing for the Radeon RDNA Architecture
OPTIMIZING FOR THE RADEONTM RDNA ARCHITECTURE LOU KRAMER DEVELOPER TECHNOLOGY ENGINEER, AMD WHO AM I? Lou Kramer Developer Technology Engineer at AMD since Nov. 2017 I work closely with game studios to make their games look amazing and run fast on AMD GPUs ☺ AMD Public | Let’s build… 2020 | Optimizing for the RadeonTM RDNA architecture | May 15, 2020 | 2 WHY THIS TALK? On July 7th 2019, we released a new GPU architecture with our RadeonTM RX 5700 cards! → RadeonTM New Architecture (RDNA) Today, we have several products based on RDNA AMD Public | Let’s build… 2020 | Optimizing for the RadeonTM RDNA architecture | May 15, 2020 | 3 WHY THIS TALK? RDNA is present in a bunch of different products Design goals of RDNA • Scalability • Special focus on • Geometry handling • Cache flushes • Amount of work in flight needed • Latency AMD Public | Let’s build… 2020 | Optimizing for the RadeonTM RDNA architecture | May 15, 2020 | 4 AGENDA • Architecture • Compute Unit (CU) Work Group Processor (WGP) • GCN RDNA • Highlights of changes • Optimizations • Texture access • Workload distribution • Shader optimizations AMD Public | Let’s build… 2020 | Optimizing for the RadeonTM RDNA architecture | May 15, 2020 | 5 COMPUTE UNIT (CU) SIMD16 SIMD16 SIMD16 SIMD16 SALU LDS Texture L1$ VGPR VGPR VGPR VGPR 64KB Units 16KB I$ SGPR 32KB 64KB 64KB 64KB 64KB K$ CU 16KB CU CU A GCN based GPU has several Compute Units - a CU has: • 4 SIMD16 + VGPRs This is where the shaders get • 1 Scalar ALU + SGPRs executed! • 1 L1 Cache • … AMD Public | Let’s build… 2020 | Optimizing -
A Survey on Bounding Volume Hierarchies for Ray Tracing
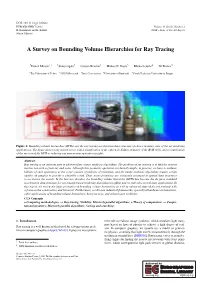
DOI: 10.1111/cgf.142662 EUROGRAPHICS 2021 Volume 40 (2021), Number 2 H. Rushmeier and K. Bühler STAR – State of The Art Report (Guest Editors) A Survey on Bounding Volume Hierarchies for Ray Tracing yDaniel Meister1z yShinji Ogaki2 Carsten Benthin3 Michael J. Doyle3 Michael Guthe4 Jiríˇ Bittner5 1The University of Tokyo 2ZOZO Research 3Intel Corporation 4University of Bayreuth 5Czech Technical University in Prague Figure 1: Bounding volume hierarchies (BVHs) are the ray tracing acceleration data structure of choice in many state of the art rendering applications. The figure shows a ray-traced scene, with a visualization of the otherwise hidden structure of the BVH (left), and a visualization of the success of the BVH in reducing ray intersection operations (right). Abstract Ray tracing is an inherent part of photorealistic image synthesis algorithms. The problem of ray tracing is to find the nearest intersection with a given ray and scene. Although this geometric operation is relatively simple, in practice, we have to evaluate billions of such operations as the scene consists of millions of primitives, and the image synthesis algorithms require a high number of samples to provide a plausible result. Thus, scene primitives are commonly arranged in spatial data structures to accelerate the search. In the last two decades, the bounding volume hierarchy (BVH) has become the de facto standard acceleration data structure for ray tracing-based rendering algorithms in offline and recently also in real-time applications. In this report, we review the basic principles of bounding volume hierarchies as well as advanced state of the art methods with a focus on the construction and traversal. -

Amd's Commitment To
This presentation contains forward-looking statements concerning Advanced Micro Devices, Inc. (AMD) such as AMD’s journey; the proposed transaction with Xilinx, Inc. including expectations, benefits and plans of the proposed transaction; total addressable markets; AMD’s technology roadmaps; the features, functionality, performance, availability, timing and expected benefits of future AMD products; AMD’s path forward in data center, PCs and gaming; and AMD’s 2021 financial outlook, long-term financial model and ability to drive shareholder returns, which are made pursuant to the Safe Harbor provisions of the Private Securities Litigation Reform Act of 1995. Forward looking statements are commonly identified by words such as "would," "may," "expects," "believes," "plans," "intends," "projects" and other terms with similar meaning. Investors are cautioned that the forward- looking statements in this presentation are based on current beliefs, assumptions and expectations, speak only as of the date of this presentation and involve risks and uncertainties that could cause actual results to differ materially from current expectations. Such statements are subject to certain known and unknown risks and uncertainties, many of which are difficult to predict and generally beyond AMD's control, that could cause actual results and other future events to differ materially from those expressed in, or implied or projected by, the forward-looking information and statements. Investors are urged to review in detail the risks and uncertainties in AMD’s Securities and Exchange Commission filings, including but not limited to AMD’s most recent reports on Forms 10-K and 10-Q. AMD does not assume, and hereby disclaims, any obligation to update forward-looking statements made in this presentation, except as may be required by law. -

All the Pipelines – Journey Through the Gpu Lou Kramer, Developer Technology Engineer, Amd Overview
ALL THE PIPELINES – JOURNEY THROUGH THE GPU LOU KRAMER, DEVELOPER TECHNOLOGY ENGINEER, AMD OVERVIEW … GIC 2020: All the pipelines – Journey through the GPU 2 CONTENT CREATION Some 3d model created via your software of choice (e.g., Blender - www.blender.org). This model is represented by a bunch of triangles. Each triangle is defined by 3 vertices. Vertices can have a number of attributes: ▪ Position ▪ Normal Vector ▪ Texture coordinate ▪ … GIC 2020: All the pipelines – Journey through the GPU 3 CONTENT CREATION .dae .abc .3ds Export .fbx .ply .obj .x3d .stl <custom> Positions Normal Vectors Texture Coordinates Connectivity Information … GIC 2020: All the pipelines – Journey through the GPU 4 CONTENT CREATION .dae .abc .3ds .fbx .ply Import .obj .x3d Game Engine of your choice .stl <custom> GIC 2020: All the pipelines – Journey through the GPU 5 RENDERING – PREPARATION ON THE CPU Geometry Render Abstraction Graphics Front End Layer APIs Engine Specific format Mesh Creation: • Vertex Buffers. Vulkan® • Index Buffers. MyDraw (vkCmdDrawIndexed,vkCmdDispatch, …) • Textures. MyDispatch D3D12 • … … Visibility Testing (DrawIndexedInstanced,Dispatch, …) • The less work the GPU D3D11 needs to do the better. … … Buffers in List of Commands System Memory (CPU) GIC 2020: All the pipelines – Journey through the GPU 6 RENDER FRONT END Data (Buffers, Textures …) PCIe® System memory Video memory GIC 2020: All the pipelines – Journey through the GPU 7 GPU COMMANDS List of Commands vkCmdBindPipeline vkCmdBindVertexBuffers vkCmdBindIndexBuffer vkCmdDrawIndexed ▪ Send a batch of commands to the GPU … so the GPU is busy for quite a while. ▪ Every command list submission takes some time! GIC 2020: All the pipelines – Journey through the GPU 8 GPU COMMANDS List of Commands vkCmdBindPipeline vkCmdBindVertexBuffers vkCmdBindIndexBuffer vkCmdDrawIndexed ▪ Send a batch of commands to the GPU … so the GPU is busy for quite a while. -

HP Z4 G4 Workstation
QuickSpecs HP Z4 G4 Workstation Overview Important Note: Features and Supported Configurations will differ between the Z4 G4 Workstations with Intel® Xeon®W Processors and the Z4 G4 Workstation with Intel® Core™ X Processors. Where different – features are shown side by side. Supported configurations are indicated by the CPU Support references. HP Z4 G4 Workstation Front view 1. Front I/O module options - Premium (optional): power button, 2 USB 3.1 G1 Type-A, 2 USB 3.1 G2 Type-C™, Headset audio, SD Card Reader (optional) (Left-most Type-A port has charging capability) - Standard (shown here): power button, 4 USB 3.1 G1 Type-A (left-most Type-A port has charging capability), Headset audio, SD Card Reader (optional) 2. Front handle 3. 2 x 5.25” external drive bays c05527757 — DA – 15954 — Worldwide — Version 36 — September 1, 2021 Page 1 QuickSpecs HP Z4 G4 Workstation Overview Internal view Intel® Xeon® W Processors Intel® Core™ X-series Processors 4. Intel® Xeon® Processors: W-2100 family 4. Intel® Core TM i7-X-series processors Intel® Core TM i9-X Series processors Intel® Core TM i9 Extreme Edition processor 5. 2 PCIe G3 x16, 2 PCIe G3 x4, 1 PCIe G3 x8 5. Core i9-X configs/Core i7 9800X: 2 PCIe G3 x16, 2 PCIe G3 x4, 1 PCIe G3 x8 Other Core i7-X configs: 1 PCIe G3 x16, 1 PCIe G3 x16 (x8 electrical), 2 PCIe G3 x4, 1 PCIe G3 x8 (mechanical only) 6. 2 PCIe G3 x4 M.2 for SSDs 6. 1 PCIe G3 x4 M.2 for SSDs 7. -
New AMD Radeon PRO W6000X Series Gpus Bring Groundbreaking High- Performance AMD RDNA 2 Architecture to Mac Pro
August 3, 2021 New AMD Radeon PRO W6000X Series GPUs Bring Groundbreaking High- Performance AMD RDNA 2 Architecture to Mac Pro – New AMD GPUs harness the high-performance, energy efficient AMD RDNA™ 2 architecture, AMD Infinity Cache and other advanced technologies to power demanding professional design and content creation workloads – – AMD Radeon™ PRO W6800X Duo graphics card with high-speed AMD Infinity Fabric™ interconnect technology delivers up to a massive 30.2 teraflops of compute performance – SANTA CLARA, Calif., Aug. 03, 2021 (GLOBE NEWSWIRE) -- AMD (NASDAQ: AMD) today announced availability of the new AMD Radeon™ PRO W6000X series GPUs for Mac Pro. The new GPU product line delivers exceptional performance and incredible visual fidelity to power a wide variety of demanding professional applications and workloads, including 3D rendering, 8K video compositing, color correction and more. Built on groundbreaking AMD RDNA 2 architecture, AMD Infinity Cache and other advanced technologies, the new workstation graphics line-up includes the AMD Radeon™ PRO W6900X and AMD Radeon™ PRO W6800X GPUs. Mac Pro users also have the option of choosing the AMD Radeon PRO W6800X Duo graphics card, a dual-GPU configuration that leverages high-speed AMD Infinity Fabric interconnect technology to deliver outstanding levels of compute performance. “We developed the AMD Radeon PRO W6000X series GPUs to unleash professionals’ creativity and help them bring more complex and compute-intensive projects to life, from animating 3D film assets to compositing -
ECE 571 – Advanced Microprocessor-Based Design Lecture 36
ECE 571 { Advanced Microprocessor-Based Design Lecture 36 Vince Weaver http://web.eece.maine.edu/~vweaver [email protected] 4 December 2020 Announcements • Don't forget projects, presentations next week (Wed and Fri) • Final writeup due last day of exams (18th) • Will try to get homeworks graded soon. 1 NVIDIA GPUs Tesla 2006 90-40nm Fermi 2010 40nm/28nm Kepler 2012 28nm Maxwell 2014 28nm Pascal/Volta 2016 16nm/14nm Turing 2018 12nm Ampere 2020 8nm/7nm Hopper 20?? ?? • GeForce { Gaming 2 • Quadro { Workstation • DataCenter 3 Also Read NVIDIA AMPERE GPU ARCHITECTURE blog post https://developer.nvidia.com/blog/nvidia-ampere-architecture-in-depth/ 4 A100 Whitepaper • A100 • Price? From Dell: $15,434.81 (Free shipping) • Ethernet and Infiniband (Mellanox) support? • Asynchronous Copy • HBM, ECC single-error correcting double-error detection (SECDED) 5 Homework Reading #1 NVIDIA Announces the GeForce RTX 30 Series: Ampere For Gaming, Starting With RTX 3080 & RTX 3090 https://www.anandtech.com/show/16057/ nvidia-announces-the-geforce-rtx-30-series-ampere-for-gaming-starting-with-rtx-3080-rtx-3090 September 2020 { by Ryan Smith 6 Background • Ampere Architecture • CUDA compute 8.0 • TSMC 7nm FINFET (A100) • Samspun 8n, Geforce30 7 GeForce RTX 30 • Samsung 8nm process • Gaming performance • Comparison to RTX 20 (Turing based) • RTX 3090 ◦ 10496 cores ◦ 1.7GHz boost clock ◦ 19.5 Gbps GDDR6X, 384 bit, 24GB ◦ Single precision 35.7 TFLOP/s ◦ Tensor (16-bit) 143 TFLOP/s 8 ◦ Ray perf 69 TFLOPs ◦ 350W ◦ 8nm Samsung (smallest non-EUV) ◦ 28 billion transistors ◦ $1500 • GA100 compute(?) TODO • Third generation tensor cores • Ray-tracing cores • A lot of FP32 (shader?) cores • PCIe 4.0 support (first bump 8 years, 32GB/s) • SLI support 9 • What is DirectStorage API? GPU can read disk directly? Why might that be useful? • 1.9x power efficiency? Is that possible? Might be comparing downclocked Ampere to Turing rather than vice-versa • GDDR6X ◦ NVidia and Micron? ◦ multi-level singnaling? ◦ can send 2 bits per clock (PAM4 vs NRZ). -

Iwomp-2020-Sponsor-AMD.Pdf
ROCm Software Stack IWOMP 2020 Vendor Presentation Greg Rodgers Derek Bouius Sept 2020 AMD PUBLIC [AMD Public Use] Cautionary Statement This presentation contains forward-looking statements concerning Advanced Micro Devices, Inc. (AMD) including, but not limited to the features, functionality, availability, timing, expectations and expected benefits of AMD’s products, which are made pursuant to the Safe Harbor provisions of the Private Securities Litigation Reform Act of 1995. Forward-looking statements are commonly identified by words such as "would," "may," "expects," "believes," "plans," "intends," "projects" and other terms with similar meaning. Investors are cautioned that the forward-looking statements in this presentation are based on current beliefs, assumptions and expectations, speak only as of the date of this presentation and involve risks and uncertainties that could cause actual results to differ materially from current expectations. Such statements are subject to certain known and unknown risks and uncertainties, many of which are difficult to predict and generally beyond AMD's control, that could cause actual results and other future events to differ materially from those expressed in, or implied or projected by, the forward-looking information and statements. Investors are urged to review in detail the risks and uncertainties in AMD's Securities and Exchange Commission filings, including but not limited to AMD’s Quarterly Report on Form 10-Q for the quarter ended June 27, 2020. 2 | IWOMP 2020 – Radeon Instinct and ROCm -
AMD Introduces Radeon™ RX 5500 Series Graphics: Superior Visual Fidelity, Advanced Features and High-Performance Gaming Experiences
October 7, 2019 AMD Introduces Radeon™ RX 5500 Series Graphics: Superior Visual Fidelity, Advanced Features and High-Performance Gaming Experiences – The AMD Radeon™ RX 5500 series provides up to 37 percent faster performance on average than the competition in select titles at 1080p1, supercharging top AAA and eSports games – – Acer, HP, Lenovo™ and MSI to provide incredible gameplay with new desktop and notebook PCs powered by Radeon™ RX 5500 series – – Gamers receive their choice of Borderlands 3 or Tom Clancy’s Ghost Recon® Breakpoint with purchase of eligible Radeon™ RX 5500 series-powered desktop and notebook systems2 – SANTA CLARA, Calif., Oct. 07, 2019 (GLOBE NEWSWIRE) -- Today, AMD (NASDAQ: AMD) announced the Radeon™ RX 5500 series graphics products, harnessing groundbreaking RDNA gaming architecture to deliver the ultimate in high-performance, high- fidelity 1080p gaming. The AMD Radeon™ RX 5500 series includes the Radeon™ RX 5500 graphics card that will be available in desktop PCs from leading manufacturers and graphics cards from board partners, as well as the Radeon™ RX 5500M GPU for notebook PCs. Top system providers worldwide are embracing the new products, with HP and Lenovo™ planning to offer Radeon™ RX 5500 graphics cards in their high-performance desktop gaming PCs beginning this November, and Acer planning to offer systems with the cards beginning this December. In addition, later this month MSI is expected to launch the world’s first gaming notebook powered by AMD Ryzen™ processors and Radeon™ RX 5500M GPUs. “Based on feedback and insights from global gaming communities, gamers rank graphics as the most critical component for speed and performance,” said Johnson Jia, senior vice president and general manager, Consumer Business of Intelligent Devices Group, Lenovo.