Investigation of 10-Bit SAR ADC Using Flip-Flip Bypass Circuit APPROVED by SUPERVISING COMMITTEE
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Sub-Threshold Startup Charge Pump Using Depletion MOSFET for a Low-Voltage Harvesting Application Gaël Pillonnet, Thomas Martinez
Sub-Threshold Startup Charge Pump using Depletion MOSFET for a low-Voltage Harvesting Application Gaël Pillonnet, Thomas Martinez To cite this version: Gaël Pillonnet, Thomas Martinez. Sub-Threshold Startup Charge Pump using Depletion MOSFET for a low-Voltage Harvesting Application. IEEE Energy Conversion Congress and Exposition, Sep 2015, Montréal, Canada. hal-01217787 HAL Id: hal-01217787 https://hal.archives-ouvertes.fr/hal-01217787 Submitted on 22 Oct 2015 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Sub-Threshold Startup Charge Pump using Depletion MOSFET for a low-Voltage Harvesting Application Gaël Pillonnet 1, Thomas Martinez 1,2 1 Univ. Grenoble Alpes, F-38000 Grenoble, France, and CEA, LETI, MINATEC Campus, F-38054 Grenoble, France 2 École polytechnique, Département de Physique, 91128 Palaiseau, France Abstract — This paper presents a fully integrated CMOS circuit design leading to an increase in size and startup time. start-up circuit for a low voltage battery-less harvesting This paper will address this key issue. application. The proposed topology is based on a step-up charge pump using depletion transistors instead of enhancement Several low-input voltage converters have been published transistors. -

Circuit Design for Fpgas in Sub-Threshold Ultra-Low Power Systems
'MVGYMX(IWMKRJSV*4+%WMR7YF8LVIWLSPH9PXVE0S[4S[IV7]WXIQW %8LIWMW 4VIWIRXIHXS XLIJEGYPX]SJXLI7GLSSPSJ)RKMRIIVMRKERH%TTPMIH7GMIRGI 9RMZIVWMX]SJ:MVKMRME MRTEVXMEPJYPJMPPQIRX SJXLIVIUYMVIQIRXWJSVXLIHIKVII 1EWXIVSJ7GMIRGI F] =Y,YERK %YKYWX %4463:%07,))8 8LIXLIWMW MWWYFQMXXIHMRTEVXMEPJYPJMPPQIRXSJXLIVIUYMVIQIRXW JSVXLIHIKVIISJ 1EWXIVSJ7GMIRGI %98,36 8LIXLIWMWLEWFIIRVIEHERHETTVSZIHF]XLII\EQMRMRKGSQQMXXII &IRXSR,'EPLSYR %HZMWSV .SERRI&IGLXE(YKER .SLR7XEROSZMG %GGITXIHJSVXLI7GLSSPSJ)RKMRIIVMRKERH%TTPMIH7GMIRGI (IER7GLSSPSJ)RKMRIIVMRKERH%TTPMIH7GMIRGI %YKYWX Acknowledgement I would like to express my gratitude to my advisor, Professor Benton H. Calhoun for his useful comments, remarks, and engagement through the learning process of my Master’s thesis. Without his support and en- couragement throughout my academic work at the University of Virginia, this work would not have been completed. I would also like to thank Professor Joanne Bechta Dugan and Professor John Stankovic for giv- ing me useful suggestions whenever I needed them. Furthermore, I want to thank Aatmesh Shrivastava, He Qi, and Oluseyi Ayorinde, who willingly shared their precious time and given me their assistance throughout our collaboration. And also, I want to thank everyone in the Robust Low Power VLSI group as well as my friends here in UVa who have helped me and spent so many happy times in work and life with me: Yousef Shaksheer, Yanqing Zhang, Kyle Craig, Peter Beshay, Ke Wang, Jiaqi Gong, James Boely, Alicia Klinefel- ter, Patricia Gonzalez, Arijit Banerjee, Divya Akella, Abhishek Roy, Chris Lukas, Farah Yahya, Hash Patel, Ningxi Liu, Manula Pathirana and Dilip Vasudevan. Last but not least, I owe more thanks to my parents, my boyfriend Kevin, and his family. Without their unconditional love and support, it would not have been possible for me to finish my degree. -

"Tps6010x/Tps6011x Charge Pump"
TPS6010x/TPS6011x Charge Pump Application Report December 1999 Mixed Signal Products SLVA070A IMPORTANT NOTICE Texas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue any product or service without notice, and advise customers to obtain the latest version of relevant information to verify, before placing orders, that information being relied on is current and complete. All products are sold subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those pertaining to warranty, patent infringement, and limitation of liability. TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent TI deems necessary to support this warranty. Specific testing of all parameters of each device is not necessarily performed, except those mandated by government requirements. CERTAIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER CRITICAL APPLICATIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICATIONS IS UNDERSTOOD TO BE FULLY AT THE CUSTOMER’S RISK. In order to minimize risks associated with the customer’s applications, adequate design and operating safeguards must be provided by the customer to minimize inherent or procedural hazards. TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other intellectual property right of TI covering or relating to any combination, machine, or process in which such semiconductor products or services might be or are used. -
High Efficiency Charge Pump Circuit for Negative High Voltage Generation at 2 V Supply Voltage
100 High Efficiency Charge Pump Circuit for Negative High Voltage Generation at 2 V Supply Voltage Martin Bloch Christ1 Lauterbach, Werner Weber Siemens AG, HL DC E EM Siemens AG, ZT ME 2 St. -Martin-Str. 76, 0-8154IMiinchen Otto-Hahn-Ring 6, 0-81730 Miinchen martin. [email protected] christl,[email protected],de [email protected] Abstract A charge pump circuit has been developed for 2. Chargepump principles the generation of negative high voltage at supply voltage levels down to 2K The generated high vol- The well-known Dickson circuit [3] consists of tage is suitable for programming Flash EEPROM asimple diode chain and two alternatingpump cells, that use Fowler-Nordheim tunneling. The key pulses at the pump capacitors. The voltage gain at issue of the circuit design has been high eflciency each stage is reduced by the forward voltage of the and small chip area. The circuit consists of n-MOS diode. Charge pumps using transfer gates with V, transfer gatesin a triple-well structure and is cancellation [4] avoidthe loss of the threshold driven by a four phase clocking scheme. The power voltage at each stage and increase the efficiency of eflciency of acharge pump, designed for low thesevoltage generators at the cost of amore power applications, is better than 25% at an output complicated clocking scheme. One approach for the power of IOOpW, including clock generation and generationof negative high voltage is acharge voltage regulation. pump with p-MOS transfer gates [4]. The common n-well of the p-MOS transfer gates is zero biased. -

Analysis and Design of an 80 Gbit/Sec Clock and Data Recovery Prototype Quentin Béraud-Sudreau
Analysis and design of an 80 Gbit/sec clock and data recovery prototype Quentin Béraud-Sudreau To cite this version: Quentin Béraud-Sudreau. Analysis and design of an 80 Gbit/sec clock and data recovery prototype. Other [cond-mat.other]. Université Sciences et Technologies - Bordeaux I, 2013. English. NNT : 2013BOR14765. tel-00821890 HAL Id: tel-00821890 https://tel.archives-ouvertes.fr/tel-00821890 Submitted on 13 May 2013 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. N° d’ordre: 4765 THÈSE présentée à L’UNIVERSITÉ BORDEAUX 1 École doctorale des Sciences Physiques et de l’Ingénieur par Quentin Béraud-Sudreau POUR OBTENIR LE GRADE DE DOCTEUR SPÉCIALITÉ : ÉLECTRONIQUE Étude, conception optimisée et réalisation d’un prototype ASIC d’une extraction d’horloge haut débit pour une nouvelle génération de liaison à 80 Gbit/sec. Soutenue le : 12 février 2013 Devant la commission d’examen formée de : M. Eric KERHERVE Professeur IPB Bordeaux Président Thierry PARRA Professeur LAAS-CNRS Rapporteur Sylvain BOURDEL Docteur IM2NP Rapporteur Michel PIGNOL Docteur -

2-2 Phase Detector…………
國 立 交 通 大 學 電子工程學系 電子研究所碩士班 碩 士 論 文 1.25 億位元/每秒四分之一時脈與資料回復電路 設計與實現 Design and Realization of a 1.25Gb/s Quarter Rate Clock and Data Recovery Circuit 研 究 生:林建華 指導教授:羅正忠 博士 中 華 民 國 九 十 五 年 七 月 1.25 億位元/每秒四分之一時脈與資料回復電路 設計與實現 Design and Realization of a 1.25Gb/s Quarter Rate Clock and Data Recovery Circuit 研 究 生:林建華 Student:Jian-Hua Lin 指導教授: 羅正忠 博士 Advisor:Dr. Zheng-Zhong Luo 國 立 交 通 大 學 電子工程學系 電子研究所碩士班 碩 士 論 文 A Thesis Submitted to Department of Electronics Engineering & Institute of Electronics College of Electrical and Computer Engineering National Chiao-Tung University in partial Fulfillment of the Requirements for the Degree of Master in Electronics Engineering July 2006 Hsinchu, Taiwan, Republic of China 中 華 民 國 九 十 五 年 七 月 1.25 億位元/每秒四分之一時脈與資料回復電路 設計與實現 研究生:林建華 指導教授:羅正忠 博士 國立交通大學 電子工程學系 電子研究所碩士班 摘要 隨著資料在高速傳輸的需求日益增加,其資料的正確性和時脈的 穩定性在類比與數位電路系統中更顯重要,包含通訊系統、有線與無 線網路、頻率調變訊號的解調、電腦與周邊設備的連結及各網域間的 連線等,我們已經利用光纖媒介來達到高頻和低損耗的傳輸[1],但 在接收端更需小心的確保資料流並沒有因雜訊的累加而放大了誤 差。資料與時脈回復器在此即扮演了關鍵角色,將時脈從接收到的資 料中取出並重新取樣被污染的資料。 本論文的主題在完成一個雙迴路的 1.25Gb/s 資料與時脈回復 I 器,並且完全使用互補式金氧半製程來實現以達到低功率、高度整合 的優點,為達到未來系統晶片強調的超低功率,我們更把時脈的頻率 降低且在不影響速度的前提下達到成效。另一方面,省卻除頻器的架 構改採解多路傳輸資料的方式。論文分為四章,第一章為簡介,第二 章介紹光纖傳輸與資料和時脈回復器的背景,第三章為本論文設計的 重點與模擬結果,第四章是比較其他篇論文, 最後總結整個設計以及 針對未來設計提出建議。 II Design and Realization of a 1.25Gb/s Quarter Rate Clock and Data Recovery Circuit Student:Jian-Hua Lin Advisors:Dr. Zheng-Zhong Luo Department of Electronics Engineering & Institute of Electronics National Chiao Tung University Abstract With the increasing demand of high speed transport of data, it is more important that the accuracy of data and the stability of clock in analog and digital systems. -
MOSFET Gate Drive Circuit Application Note
MOSFET Gate Drive Circuit Application Note MOSFET Gate Drive Circuit Description This document describes gate drive circuits for power MOSFETs. © 2017 - 2018 1 2018-07-26 Toshiba Electronic Devices & Storage Corporation MOSFET Gate Drive Circuit Application Note Table of Contents Description ............................................................................................................................................ 1 Table of Contents ................................................................................................................................. 2 1. Driving a MOSFET ........................................................................................................................... 3 1.1. Gate drive vs. base drive.................................................................................................................... 3 1.2. MOSFET characteristics ...................................................................................................................... 3 1.2.1. Gate charge ........................................................................................................................................... 4 1.2.2. Calculating MOSFET gate charge ....................................................................................................... 4 1.2.3. Gate charging mechanism ................................................................................................................... 5 1.3. Gate drive power ................................................................................................................................ -

CMOS Cross-Coupled Charge Pump with Improved Latch-Up Immunity
IEICE Electronics Express, Vol.6, No.11, 736–742 CMOS cross-coupled charge pump with improved latch-up immunity Su-Jin Park1,2, Yong-Gu Kang1, Joung-Yeal Kim1,2, Tae Hee Han1, Young-Hyun Jun2, Chilgee Lee1, and Bai-Sun Kong1a) 1 School of Information and Communication Eng., Sungkyunkwan Univ., Suwon, Gyeonggi-do 440–746, South Korea 2 DRAM Design Team, Memory Division, Samsung Electronics, Hwasung, Gyeonggi-do 445–701, South Korea a) [email protected] Abstract: In this paper, a novel CMOS charge pump with sub- stantially improved immunity to latch-up is presented. By utilizing a dedicated bulk pumping and blocking (DBPB) technique, the proposed charge pump achieves greatly reduced forward voltage of source/drain- substrate junction of transistors, resulting in decreased charge loss and increased latch-up immunity. Comparison results indicated that the maximum bulk forward voltage of the proposed charge pump was less than 0.05 V (88% improvement) for zero output current during power- up, and less than 0.12 V (88% improvement) regardless of the amount of output current during ordinary pumping operation. Keywords: bulk forward, charge pump, latch-up, voltage doubler Classification: Integrated circuits References [1] J. F. Dickson, “On-chip high-voltage generation in NMOS integrated cir- cuits using an improved voltage multiplier technique,” IEEE J. Solid-State Circuits, vol. 11, pp. 374–378, June 1976. [2] T. B. Cho and P. R. Gray, “A 10-bit, 20 Msample/s, 35 mW pipeline A/D converter” IEEE J. Solid-State Circuits, pp. 166–172, March 1995. [3] R. C. Fang and J. -

A Review of Charge Pump Topologies for the Power Management of Iot Nodes
electronics Review A Review of Charge Pump Topologies for the Power Management of IoT Nodes Andrea Ballo , Alfio Dario Grasso * and Gaetano Palumbo Dipartimento di Ingegneria Elettrica Elettronica e Informatica (DIEEI), University of Catania, I-95125 Catania, Italy; [email protected] (A.B.); [email protected] (G.P.) * Correspondence: [email protected]; Tel.: +39-095-738-2317 Received: 11 April 2019; Accepted: 24 April 2019; Published: 29 April 2019 Abstract: With the aim of providing designer guidelines for choosing the most suitable solution, according to the given design specifications, in this paper a review of charge pump (CP) topologies for the power management of Internet of Things (IoT) nodes is presented. Power management of IoT nodes represents a challenging task, especially when the output of the energy harvester is in the order of few hundreds of millivolts. In these applications, the power management section can be profitably implemented, exploiting CPs. Indeed, presently, many different CP topologies have been presented in literature. Finally, a data-driven comparison is also provided, allowing for quantitative insight into the state-of-the-art of integrated CPs. Keywords: charge pump (CP); Dickson charge pump; energy harvesting; IoT node; power management; switched-capacitors boost converter 1. Introduction The Internet of Things (IoT) paradigm is expected to have a pervasive impact in the next years. The ubiquitous character of IoT nodes implies that they must be untethered and energy autonomous. In IoT nodes, power-autonomy is achieved by scavenging energy from the ambient using transducers, such as photovoltaic (PV) cells, thermoelectric generators (TEG), and vibration sensors [1–4]. -
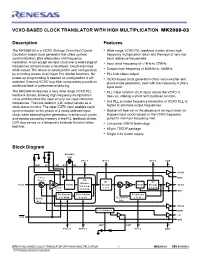
MK2069-03 Datasheet
DATASHEET VCXO-BASED CLOCK TRANSLATOR WITH HIGH MULTIPLICATION MK2069-03 Description Features The MK2069-03 is a VCXO (Voltage Controlled Crystal • Wide range VCXO PLL feedback divider allows high Oscillator) based clock generator that offers system frequency multiplication ratios and the input of very low synchronization, jitter attenuation and frequency input reference frequencies translation. It can accept an input clock over a wide range of • Input clock frequency of <1kHz to 27MHz frequencies and produces a de-jittered, low phase noise clock output. The device is optimized for user configuration • Output clock frequency of 500kHz to 160MHz by providing access to all major PLL divider functions. No • PLL lock status output power-up programming is needed as configuration is pin • VCXO-based clock generation offers very low jitter and selected. External VCXO loop filter components provide an phase noise generation, even with low frequency or jittery additional level of performance tailoring. input clock. The MK2069-03 features a very wide range VCXO PLL • PLL Clear function (CLR input) allows the VCXO to feedback divider, allowing high frequency multiplication free-run, offering a short term holdover function. ratios and therefore the input of very low input reference 2nd PLL provides frequency translation of VCXO PLL to frequencies. The lock detector (LD) output serves as a • higher or alternate output frequencies. clock status monitor. The clear (CLR) input enables rapid synchronization to the phase of a newly selected input • Device will free-run in the absence of an input clock (or clock, while eliminating the generation of extra clock cycles stopped input clock) based on the VCXO frequency and wander caused by memory in the PLL feedback divider. -
A Self-Boost Charge Pump Topology for a Gate Drive High-Side Power Supply Shihong Park, Student Member, IEEE, and Thomas M
300 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 20, NO. 2, MARCH 2005 A Self-Boost Charge Pump Topology for a Gate Drive High-Side Power Supply Shihong Park, Student Member, IEEE, and Thomas M. Jahns, Fellow, IEEE Abstract—A self-boost charge pump topology is presented for a floating high-side gate drive power supply that features high voltage and current capabilities for use in integrated power electronic modules (IPEMs). The transformerless topology uses a small capacitor to transfer energy to the high-side switch from a single power supply referred to the negative rail. Unlike con- ventional bootstrap power supplies, no switching of the main phase-leg switches is required to provide power continuously to the high-side gate drive, even if the high-side switch is permanently on. Additional advantages include low parts-count and simple control requirements. A piecewise linear model of the self-boost charge pump is derived and the circuit’s operating characteristics are analyzed. Simulation and experimental results are provided to verify the desired operation of the new charge pump circuit. Guidelines are provided to assist with circuit component selection in new applications. Index Terms—Bootstrap power supply, floating, high-side gate drive, MOS-gated power semiconductors, power module, transformerless. Fig. 1. Self-boost charge pump circuit configuration for an inverter phase leg high-side power supply. I. INTRODUCTION provide the needed power for a high-side gate drive without in- A. Background terfering with the desired phase-leg switching sequence. How- ever, it is not widely used due to its higher complexity and its OOTSTRAP circuits are widely used in bridge inverters requirements for high-voltage level shifting to supply control to provide the floating power supply for high-side switch B signals to the auxiliary switches. -

LT1054 Switched-Capacitor Voltage Converters with Regulators Datasheet
LT1054 SLVS033G –FEBRUARY 1990–REVISED JULY 2015 LT1054 Switched-Capacitor Voltage Converters With Regulators 1 Features 3 Description The LT1054 device is a bipolar, switched-capacitor 1• Output Current, 100 mA voltage converter with regulator. It provides higher • Low Loss, 1.1 V at 100 mA output current and significantly lower voltage losses • Operating Range, 3.5 V to 15 V than previously available converters. An adaptive- • Reference and Error Amplifier for Regulation switch drive scheme optimizes efficiency over a wide • External Shutdown range of output currents. • External Oscillator Synchronization Total voltage drop at 100-mA output current typically is 1.1 V. This applies to the full supply-voltage range • Devices Can Be Paralleled of 3.5 V to 15 V. Quiescent current typically is 2.5 • Pin-to-Pin Compatible With the LTC1044/7660 mA. 2 Applications The LT1054 also provides regulation, a feature previously not available in switched-capacitor voltage • Industrial Communications (RS232) converters. By adding an external resistive divider, a • Data Acquisition Supply regulated output can be obtained. This output is regulated against changes in both input voltage and • Voltage Inverters output current. The LT1054 can also shut down by • Voltage Regulators grounding the feedback terminal. Supply current in • Negative Voltage Doublers shutdown typically is 100 μA. • Positive Voltage Doublers The internal oscillator of the LT1054 runs at a nominal frequency of 25 kHz. The oscillator terminal can be used to adjust the switching frequency or to externally synchronize the LT1054. The LT1054C is characterized for operation over a free-air temperature range of 0°C to 70°C.