Modeling and Control of Modern Wind Turbine Systems: an Introduction†
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
RERL Fact Sheet 1, Community Wind Technology
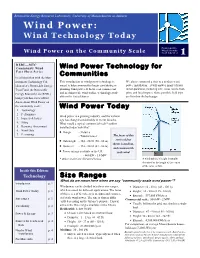
Renewable Energy Research Laboratory, University of Massachusetts at Amherst Wind Power: Wind Technology Today Community Wind Power on the Community Scale Wind Power Fact Sheet # 1 RERL—MTC Community Wind Wind Power Technology for Fact Sheet Series Communities In collaboration with the Mas- sachusetts Technology Col- This introduction to wind power technology is We also recommend a visit to a modern wind laborative’s Renewable Energy meant to help communities begin considering or power installation – it will answer many of your Trust Fund, the Renewable planning wind power. It focuses on commercial initial questions, including size, noise levels, foot- Energy Research Lab (RERL) and medium-scale wind turbine technology avail- print, and local impact. Some possible field trips able in the United States. are listed on the back page. brings you this series of fact sheets about Wind Power on the community scale: Wind Power Today 1. Technology 2. Performance Wind power is a growing industry, and the technol- 3. Impacts & Issues ogy has changed considerably in recent decades. 4. Siting What would a typical commercial-scale* turbine 5. Resource Assessment installed today look like? 6. Wind Data • Design - 3 blades 7. Permitting - Tubular tower The focus of this series of fact • Hub-height - 164 - 262 ft (50 - 80 m) sheets is medium- • Diameter: - 154 - 262 ft (47 - 80 m) and commercial- • Power ratings available in the US: scale wind. - 660 kW - 1.8 MW * Other scales are discussed below. A wind turbine’s height is usually described as the height of the center of the rotor, or hub. Inside this Edition: Technology Size Ranges What do we mean here when we say “community-scale wind power”? Introduction p. -

A Method That Lends Wings
FLASHBACK_Aerodynamics A method that lends wings Mathematician Irmgard Flügge-Lotz was one of the first female researchers in the field of aerodynamics and automatic control. While working at the Kaiser Wilhelm Institute for Flow Research, she succeeded in simplifying the calculations required for aircraft construction. Flügge-Lotz was later appointed the first female Professor of Engineering at Stanford University. In the U.S., her work is still held in high esteem. In Germany, however, she has been all but forgotten. TEXT KATJA ENGEL Goettingen, 1931. Leading flow researcher could only be tested by means of complex Ludwig Prandtl was astonished. His colleague, wind tunnel measurements. Ludwig Prandtl, at 28 just half his age, had just handed him who is generally thought to be the founder of the solution to a mathematical puzzle that no- aircraft aerodynamics, and his team in Goet- body had been able to crack for more than ten tingen carried out pioneering work on the years. This conundrum was on his “menu”, as theoretical description of lift. However, math- he called his list of uncompleted research ematical calculations of his wing theory tasks. The result went down in the history of turned out to be difficult. In 1919, Albert Betz, aerodynamic research together with the a doctoral student in Goettingen who was young researcher's name. The "Lotz method" later to become Prandtl’s successor at the In- makes it possible to calculate the lift on an air- stitute, finally succeeded in the describing lift plane wing with comparative ease. by means of differential equations. However, Prandtl soon made the woman who had so his formulae were too complex for practical impressed him an (unofficial) Head of Depart- use when constructing new profiles. -

Active Management of Flap-Edge Trailing Vortices*
4th Flow Control Conference, Seattle, Washington, June 23-26, 2008 Active Management of Flap-Edge Trailing Vortices* David Greenblatt Technion – Israel Institute of Technology, Haifa, Israel Chung-Sheng Yao† NASA Langley Research Center, Hampton VA, USA Stefan Vey,‡ Oliver C. Paschereit¶ Berlin University of Technology, Berlin, Germany Robert Meyer§ German Aerospace Center (DLR), Berlin, Germany The vortex hazard produced by large airliners and increasingly larger airliners entering service, combined with projected rapid increases in the demand for air transportation, is expected to act as a major impediment to increased air traffic capacity. Significant reduction in the vortex hazard is possible, however, by employing active vortex alleviation techniques that reduce the wake severity by dynamically modifying its vortex characteristics, providing that the techniques do not degrade performance or compromise safety and ride quality. With this as background, a series of experiments were performed, initially at NASA Langley Research Center and subsequently at the Berlin University of Technology in collaboration with the German Aerospace Center. The investigations demonstrated the basic mechanism for managing trailing vortices using retrofitted devices that are decoupled from conventional control surfaces. The basic premise for managing vortices advanced here is rooted in the erstwhile forgotten hypothesis of Albert Betz, as extended and verified ingeniously by Coleman duPont Donaldson and his collaborators. Using these devices, vortices may be perturbed at arbitrarily long wavelengths down to wavelengths less than a typical airliner wingspan and the oscillatory loads on the wings, and hence the vehicle, are small. Significant flexibility in the specific device has been demonstrated using local passive and active separation control as well as local circulation control via Gurney flaps. -

Experimenting Close to the Wind
FLASHBACK_Aerodynamics Experimenting Close to the Wind Wind energy is a technology with a future – and with origins that can be traced far back into the past. One of its pioneers was Albert Betz, who was a Director at the Max Planck Institute for Fluid Dynamics in Göttingen from 1947 to 1956. TEXT MICHAEL GLOBIG “When, after the war, our economy was be allowed to flow through without reduc- Inspired by the sophisticated criteria for suffering acutely from the general shortage ing the air speed at all – in which case, aircraft propellers, in the mid-1920s Betz of coal, attention once again turned more once again, no energy would be “tapped.” turned his attention to windmill sails and eagerly to other sources of energy. In addi- discovered that these are subject to the tion to the development of hydropower, it GÖTTINGEN BECOMES THE same laws as propellers: a propeller driven was primarily recommended to make CENTER OF EXISTENCE by an engine creates air pressure, whereas greater use of wind energy. This interest windmills rotate in response to natural air continued even after the coal shortage was It can thus be assumed that, between pressure. Exactly the same aerodynamic overcome.” Albert Betz, who wrote these these two extremes, there must be an area laws apply to both and can be calculated lines, was himself one of the pioneers of in which mechanical energy can be extract- using the same equations. However, wind- wind power. It was he who postulated a ed by slowing the wind down. Upon closer mills with sails that exhibit an exact pro- law, now named after him, that no engi- examination, it becomes apparent that peller shape have a very low starting neer can afford to ignore. -

Chapter on Prandtl
2 Prandtl and the Gottingen¨ school Eberhard Bodenschatz and Michael Eckert 2.1 Introduction In the early decades of the 20th century Gottingen¨ was the center for mathemat- ics. The foundations were laid by Carl Friedrich Gauss (1777–1855) who from 1808 was head of the observatory and professor for astronomy at the Georg August University (founded in 1737). At the turn of the 20th century, the well- known mathematician Felix Klein (1849–1925), who joined the University in 1886, established a research center and brought leading scientists to Gottingen.¨ In 1895 David Hilbert (1862–1943) became Chair of Mathematics and in 1902 Hermann Minkowski (1864–1909) joined the mathematics department. At that time, pure and applied mathematics pursued diverging paths, and mathemati- cians at Technical Universities were met with distrust from their engineering colleagues with regard to their ability to satisfy their practical needs (Hensel, 1989). Klein was particularly eager to demonstrate the power of mathematics in applied fields (Prandtl, 1926b; Manegold, 1970). In 1905 he established an Institute for Applied Mathematics and Mechanics in Gottingen¨ by bringing the young Ludwig Prandtl (1875–1953) and the more senior Carl Runge (1856– 1927), both from the nearby Hanover. A picture of Prandtl at his water tunnel around 1935 is shown in Figure 2.1. Prandtl had studied mechanical engineering at the Technische Hochschule (TH, Technical University) in Munich in the late 1890s. In his studies he was deeply influenced by August Foppl¨ (1854–1924), whose textbooks on tech- nical mechanics became legendary. After finishing his studies as mechanical engineer in 1898, Prandtl became Foppl’s¨ assistant and remained closely re- lated to him throughout his life, intellectually by his devotion to technical mechanics and privately as Foppl’s¨ son-in-law (Vogel-Prandtl, 1993). -
On the Minimum Induced Drag of Wings
On the Minimum Induced Drag of Wings Albion H. Bowers NASA Dryden Flight Research Center AIAA/SFTE AV Chapters Lancaster, CA 16 August, 2007 Introduction λ The History of Spanload Development of the optimum spanload Winglets and their implications λ Horten Sailplanes λ Flight Mechanics & Adverse yaw λ Concluding Remarks History λ Bird Flight as the Model for Flight λ Vortex Model of Lifting Surfaces λ Optimization of Spanload Prandtl Prandtl/Horten/Jones Klein/Viswanathan λ Winglets - Whitcomb Birds Bird Flight as a Model or “Why don’t birds have vertical tails?” λ Propulsion Flapping motion to produce thrust Wings also provide lift Dynamic lift - birds use this all the time (easy for them, hard for us) λ Stability and Control Still not understood in literature Lack of vertical surfaces λ Birds as an Integrated System Structure Propulsion Lift (performance) Stability and control Dynamic Lift Early Mechanical Flight λ Otto & Gustav Lilienthal (1891-1896) λ Octave Chanute (1896-1903) λ Samuel P Langley (1896-1903) λ Wilbur & Orville Wright (1899-1905) Otto Lilienthal λ Glider experiments 1891 - 1896 Dr Samuel Pierpont Langley λ Aerodrome experiments 1887-1903 Octave Chanute λ Gliding experiments 1896 to 1903 Wilbur & Orville Wright λ Flying experiments 1899 to 1905 Spanload Development λ Ludwig Prandtl Development of the boundary layer concept (1903) Developed the “lifting line” theory Developed the concept of induced drag Calculated the spanload for minimum induced drag (1908?) Published in open literature (1920) λ Albert Betz Published -

Schnellflug- Und Pfeilflügeltechnik
Der weitere Rundgang in der Halle 2 - die Schnellflugausstellung und die Geschichte der aerodynamischen Pfeilflügeltechnik mit der durch sie veränderten Welt Bevor wir Sie weiter durch unsere Ausstellung führen, wollen wir Sie ein wenig über die Hintergründe unserer Arbeit vertraut machen. Wir benötigen dafür Fachwissen mit breitem Hintergrund, und das müssen wir zusammen- tragen. Im Lauf der letzten 25 Jahre ist das eine stattliche Menge geworden und wird in unserem Archiv in einem Nebengebäude bearbeitet und verwaltet. Selbstverständlich müssen schon Grundkenntnisse durch eine längere Beschäftigung mit diesem komplexen Thema vorhanden sein, seien es technische, historische oder noch andere Zugänge. Unser Archiv: Oben links die Büchersammlung, rechts ebenso mit einem Teil der Flugzeug- Typensammlung, unten die Buchstaben A - D der Typensammlung in den A4-Ordnern. Doch kann man sich auch als Fachfremder gut darin einarbeiten, wenn man "zur Stange" hält. Wir alle sind als ehrenamtliche Mitarbeiter im Museumsteam keine studierten Museums- pädagogen oder sonstige Fachwissenschaftler, sondern Menschen aus allen möglichen Berufen, Handwerker und Juristen, Verwaltungsleute und Mediziner. Uns eint die Liebe zur Fliegerei, deren Technik und der Wille zur historischen Einordnung. Und ordentlich mit solchen Themen umzugehen, haben wir in anderen Berufen gelernt. Im Archivgebäude haben wir mehrere Räume, in denen einmal so um 4 - 5 tausend Bücher, diverse Luftfahrtzeitschriften und andere Periodika versammelt sind. Dazu kommt eine ausgedehnte Flugzeugtypensammlung, die sich aus Veröffentlichungen einheimischer und auswärtiger Luftfahrtzeitschriften über die letzen 60 - 70 Jahre speist, mit Motor-, Segel- und UL-Flugzeugen sowie Hubschraubern. Das sind noch einmal gute 800 A-4 Bände, Die verschiedenen Typen sind nach Herstellern alphabetisch sortiert. Dieses Archiv dürfen Sie nach tel. -
Minimum Induced Drag & Bending Moment
On the Minimum Induced Drag of Wings -or- Thinking Outside the Box" Albion H. Bowers! NASA Dryden Flight Research Center! 04 Sep11! Introduction" " The History of Spanload# Development of the optimum spanload# Winglets and their implications! " Horten Sailplanes! " Flight Mechanics & Adverse yaw! " Concluding Remarks! Birds" Bird Flight as a Model! or “Why don#t birds have vertical tails?”" " Propulsion# Flapping motion to produce thrust# Wings also provide lift# Dynamic lift - birds use this all the time (easy for them, hard for us)! " Stability and Control# Still not understood in literature# Lack of vertical surfaces! " Birds as an Integrated System# Structure# Propulsion# Lift (performance)# Stability and control! " Wright dis-integrated the bird! " Its time to reintegrate bird-flight! Dynamic Lift Spanload Development" " Ludwig Prandtl# Development of the boundary layer concept (1903)# Developed the “lifting line” theory# Developed the concept of induced drag# Calculated the spanload for minimum induced drag (1908?)# Published in open literature (1920)# " Albert Betz# Published calculation of induced drag# Published optimum spanload for minimum induced drag (1914)# Credited all to Prandtl (circa 1908)! Spanload Development (continued)" " Max Munk# General solution to multiple airfoils# Referred to as the “stagger biplane theorem” (1920)# Munk worked for NACA Langley from 1920 through 1926# " Prandtl (again!)# “The Minimum Induced Drag of Wings” (1932)# Introduction of new constraint to spanload# Considers the bending moment as well -

Historical Trajectories and Corporate Competences in Wind Energy
Historical Trajectories and Corporate Competences in Wind Energy Geoffrey Jones Loubna Bouamane Working Paper 11-112 Copyright © 2011 by Geoffrey Jones and Loubna Bouamane Working papers are in draft form. This working paper is distributed for purposes of comment and discussion only. It may not be reproduced without permission of the copyright holder. Copies of working papers are available from the author. Historical Trajectories and Corporate Competences in Wind Energy* Geoffrey Jones Loubna Bouamane Harvard Business School Harvard Business School May 2011 Abstract This working paper surveys the business history of the global wind energy turbine industry between the late nineteenth century and the present day. It examines the long- term prominence of firms headquartered in Denmark, the more fluctuating role of US- based firms, and the more recent growth of German, Spanish, Indian and Chinese firms. While natural resource endowment in wind has not been very significant in explaining the country of origin of leading firms, the existence of rural areas not supplied by grid electricity was an important motivation for early movers in both the US and Denmark. Public policy was the problem rather than the opportunity for wind entrepreneurs before 1980, but beginning with feed-in tariffs and other policy measures taken in California, policy mattered a great deal. However, Danish firms, building on inherited technological capabilities and benefitting from a small-scale and decentralized industrial structure, benefitted more from Californian public policies. The more recent growth of German, Spanish and Chinese firms reflected both home country subsidies for wind energy and strong local content policies, whilst successful firms pursued successful strategies to acquire technologies and develop their own capabilities. -

Göttinger Monograph N: German Research and Development on Rotary-Wing Aircraft (1939-1945)
Göttinger Monograph N: German Research and Development on Rotary-Wing Aircraft (1939-1945) Edited by Berend G. van der Wall, German Aerospace Center (DLR) Book Review by Walter G.O. Sonneborn fter the end of World War II, the Origin of the AVA Monograph N; Short maximum takeoff weight of 4,300 kg British Ministry of Supply — Biographies; Index; Supporting Materials (9,480 lb) and a Vh of 210 km/hr (113 kt), Ainterested in German aeronautical This 245 page book is a must for and achieved a ceiling height of 7,100 m technology developed during war rotorcraft history buffs as it gives a (23,000+ ft). — ordered the German aeronautical comprehensive view of the efforts of Configurations from pure autogyros, research establishments in Göttingen the German rotorcraft pioneers during single rotor helicopters (some with and Braunschweig to summarize their the years from 1939 through 1945. Their transition to autogyro flight for high research. The Göttingen Monographs work was contemporaneous with that of speed), intermeshing rotors, and side- About Advancements of the German Ludwig Prandtl (1875-1953), the founder by-side configurations were developed. Aeronautical Research Since 1939 of modern aerodynamics, working at the With today’s renewed interest in comprised several volumes. Volume University of Göttingen and founder of compound helicopters, the Flettner N, German Research and Development the famous AVA (Aerodynamic Research Fl-185 helicopter deserves special on Rotary-Wing Aircraft – written by Establishment). mentioning, as it used two propellers Gerhard Sissingh and O.H. Nagel and However, this book should also for both automatically adjusted torque edited by Albert Betz (as in the Betz be of great interest to any student reaction as well as auxiliary thrust. -
Transonic Flow Around Swept Wings
Transonic Flow Around Swept Wings: Revisiting Von Kármán’s Similarity Rule by Jeffrey J Kirkman A Thesis Presented in Partial Fulfillment of the Requirements for the Degree Master of Science Approved April 2016 by the Graduate Supervisory Committee: Timothy Takahashi, Chair Valana Wells Marcus Herrmann ARIZONA STATE UNIVERSITY May 2016 ABSTRACT Modern aircraft are expected to fly faster and more efficiently than their predecessors. To improve aerodynamic efficiency, designers must carefully consider and handle shock wave formation. Presently, many designers utilize computationally heavy optimization methods to design wings. While these methods may work, they do not provide insight. This thesis aims to better understand fundamental methods that govern wing design. In order to further understand the flow in the transonic regime, this work revisits the Transonic Similarity Rule. This rule postulates an equivalent incompressible geometry to any high speed geometry in flight and postulates a “stretching” analogy. This thesis utilizes panel methods and Computational Fluid Dynamics (CFD) to show that the “stretching” analogy is incorrect, but instead the flow is transformed by a nonlinear “scaling” of the flow velocity. This work also presents data to show the discrepancies between many famous authors in deriving the accurate Critical Pressure Coefficient (Cp*) equation for both swept and unswept wing sections. The final work of the thesis aims to identify the correct predictive methods for the Critical Pressure Coefficient. i TABLE OF CONTENTS -
Ludwig Prandtl Took up the Chair of Applied Mechanics Göttinger Klassiker Der Strömungsmechanik Bd
When Ludwig Prandtl took up the Chair of Applied Mechanics Göttinger Klassiker der Strömungsmechanik Bd. 9 at Göttingen University in 1904, the small university town be- herausgegeben von Andreas Dillmann came the cradle of modern fl uid mechanics and aerodynamics. Not only did Prandtl found two research institutions of world- wide renown, the Aerodynamische Versuchsanstalt (AVA) and the Kaiser-Wilhelm-Institut für Strömungsforschung, but with the so-called ‘Göttingen School’ he also established an excep- Johanna Vogel-Prandtl tionally fertile line of scientifi c thinking, unique for its special balance of intuition for physics and mathematical precision. Ludwig Prandtl The scientifi c methods developed by Prandtl and his pupils are A Personal Biography Drawn from Memories manifested in numerous dissertations, monographs and text- books that now rate as classics and hence belong to the fun- and Correspondence damental works on fl uid mechanics. Yet many of these publi- cations have long been out of print and inaccessible for study. The series Göttinger Klassiker der Strömungsmechanik is thus making available selected publications that emerged from Lud- wig Prandtl’s ‘Göttingen School’ or stand in a particular histo- rical relationship to it. This highly personal biography of Ludwig Prandtl compiled by his daughter, Johanna Vogel-Prandtl, is complemented by nu- merous photographs depicting Prandtl’s working and private life. It completes the picture of the founding father of modern fl uid mechanics whose scientifi c importance continues to reso-