Digital Paleoart: Reconstruction and Restoration from Laser-Scanned Fossils Evan Matthew Boucher Theo A
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

R~;: PHYSIOLOGICAL, MIGRATORIAL
....----------- 'r~;: i ! 'r; Pa/eont .. 62(4), 1988, pp. 64~52 Copyright © 1988, The Paleontological Society 0022-3360/88/0062-0640$03.00 PHYSIOLOGICAL, MIGRATORIAL, CLIMATOLOGICAL, GEOPHYSICAL, SURVIVAL, AND EVOLUTIONARY IMPLICATIONS OF CRETACEOUS POLAR DINOSAURS GREGORY S. PAUL 3109 North Calvert Street, Baltimore, Maryland 21218 ABSTRACTT- he presence of Late Cretaceous social dinosaurs in polar regions confronted them with winter conditions of extended dark, coolness, breezes, and precipitation that could best be coped with via an endothermic homeothermic physiology of at least the tenrec level. This is true whether the dinosaurs stayed year round in the polar regime-which in North America extended from Alaska south to Montana-or if they migrated away from polar winters. More reptilian physiologies fail to meet the demands of such winters -in certain key ways, a· point tentatively confirmed by the apparent failure of giant Late Cretaceous phobosuchid crocodilians to dwell north of Montana. Low metabolisms were also insufficient for extended annual migrations away from and towards the poles. It is shown that even high metabolic rate dinosaurs probably remained in their polar habitats year-round. The possibility that dinosaurs had avian-mammalian metabolic systems, and may have borne insulation at least seasonally, severely limits their use as polar paleoclimatic and Earth axial tilt indicators. Polar dinosaurs may have been a center of dinosaur evolution. The possible ability of polar dinosaurs to cope with conditions of cool and dark challenges theories that a gradual temperature decline, or a sudden, meteoritic or volcanic induced collapse in temperature and sunlight, destroyed the dinosaurs. INTRODUCTION America suggests that dinosaurs were regularly crossing, and NCREASINGNUMBERSof remains show that dinosaurs lived living upon, the Bering Land Bridge within a few degrees of the I near the North and South Poles during the Cretaceous. -

State of the Palaeoart
Palaeontologia Electronica http://palaeo-electronica.org State of the Palaeoart Mark P. Witton, Darren Naish, and John Conway The discipline of palaeoart, a branch of natural history art dedicated to the recon- struction of extinct life, is an established and important component of palaeontological science and outreach. For more than 200 years, palaeoartistry has worked closely with palaeontological science and has always been integral to the enduring popularity of prehistoric animals with the public. Indeed, the perceived value or success of such products as popular books, movies, documentaries, and museum installations can often be linked to the quality and panache of its palaeoart more than anything else. For all its significance, the palaeoart industry ment part of this dialogue in the published is often poorly treated by the academic, media and literature, in turn bringing the issues concerned to educational industries associated with it. Many wider attention. We argue that palaeoartistry is standard practises associated with palaeoart pro- both scientifically and culturally significant, and that duction are ethically and legally problematic, stifle improved working practises are required by those its scientific and cultural growth, and have a nega- involved in its production. We hope that our views tive impact on the financial viability of its creators. inspire discussion and changes sorely needed to These issues create a climate that obscures the improve the economy, quality and reputation of the many positive contributions made by palaeoartists palaeoart industry and its contributors. to science and education, while promoting and The historic, scientific and economic funding derivative, inaccurate, and sometimes exe- significance of palaeoart crable artwork. -

Central San Juan Basin
Acta - ---- - - ---Palaeontologic- -- ---' ~ Polonica Vol. 28, No. 1-2 pp. 195-204 Warszawa, 1983 Second Symposium on Mesozoic Terrestiol. Ecosystems, Jadwisin 1981 SPENCER G. LUCAS and NIALL J. MATEER VERTEBRATE PALEOECOLOGY OF THE LATE CAMPANIAN (CRETACEOUS):FRUITLAND FORMATION, SAN JUAN BASIN, ~EW MEXICO (USA) LUCAS, s. G. and MATEER, N. J .: Vertebrate paleoecology of the late Campanian (Cretaceous) Fruitland Formation, San Juan Basin, New Mexico (USA). Acta Palaeontologica Polonica, 28, 1-2, 195-204, 1983. Sediments of the Fruitland Formation in northwestern New Mexico represent a delta plain that prograded northeastward over the retrating strandline of the. North American epeiric seaway during the late Campanian. Fruitland fossil · vertebrates are fishes, amphibians, lizards, a snake, turtles, crocodilians, dinosaurs (mostly h adrosaurs and ceratopsians) and mammals. Autochthonous fossils in the Fruitland ' Form ation represent organisms of the trophically-complex Para saurolophus community. Differences in diversity, physical stress and life-history strategies within the ParasaurolopllUS community . fit well the stablllty-time hypothesis. Thus, dinosaurs experienced relatively low physical stress whereas fishes, amphibians, small reptiles and mammals experienced greater physical stress. Because of this, dinosaurs were less likely to recover from an environment al catastrophe than were smaller contemporaneous vertebrates. The terminal Cretaceous extinctions selectively eliminated animals that lived in less physlcally -stressed situations, indicating that the extinctions resulted from an environmental catastrophe. Key w 0 r d s: Fruitland Formation, New Mexico, delta plain, stablllty-time hypothesis, Cretaceous extinctions. Spencer G. Lucas, Department ot Geology and Geophysics and Peabody Museum ot Natural History, Yale University, P.O. Box 6666, New Haven, Connecticut 06511 USA ; NlaU J . -

A Bird's Eye View of the Evolution of Avialan Flight
Chapter 12 Navigating Functional Landscapes: A Bird’s Eye View of the Evolution of Avialan Flight HANS C.E. LARSSON,1 T. ALEXANDER DECECCHI,2 MICHAEL B. HABIB3 ABSTRACT One of the major challenges in attempting to parse the ecological setting for the origin of flight in Pennaraptora is determining the minimal fluid and solid biomechanical limits of gliding and powered flight present in extant forms and how these minima can be inferred from the fossil record. This is most evident when we consider the fact that the flight apparatus in extant birds is a highly integrated system with redundancies and safety factors to permit robust performance even if one or more components of their flight system are outside their optimal range. These subsystem outliers may be due to other adaptive roles, ontogenetic trajectories, or injuries that are accommodated by a robust flight system. This means that many metrics commonly used to evaluate flight ability in extant birds are likely not going to be precise in delineating flight style, ability, and usage when applied to transitional taxa. Here we build upon existing work to create a functional landscape for flight behavior based on extant observations. The functional landscape is like an evolutionary adap- tive landscape in predicting where estimated biomechanically relevant values produce functional repertoires on the landscape. The landscape provides a quantitative evaluation of biomechanical optima, thus facilitating the testing of hypotheses for the origins of complex biomechanical func- tions. Here we develop this model to explore the functional capabilities of the earliest known avialans and their sister taxa. -

It Came from N.J.: a Prehistoric Croc Scientists' Rare Find Will Go on Display
Philadelphia Inquirer, The (PA) January 14, 2006 Section: LOCAL Edition: CITY-D Page: A01 It came from N.J.: A prehistoric croc Scientists' rare find will go on display. Tom Avril INQUIRER STAFF WRITER About 65 million years ago, when most of South Jersey was underwater and the rest was a fetid swamp, a crocodile died in present-day Gloucester County and sank to the bottom of the sea. Scientists from Drexel University and the New Jersey State Museum know this because they found what remains of the reptile lying submerged in the greenish, sandy clay known as marl. It is one of the most complete skeletons yet recovered of Thoracosaurus neocesariensis, a fish-eating crocodile whose remains usually consist of a stray tooth or two. The fossil, discovered in April, will be displayed in Drexel's Stratton Hall, starting Jan. 23, for about a year before heading to the state museum in Trenton. The creature helps give scientists a sort of back-to-the-future view of what the world might look like some day with a continued increase in global warming. Levels of carbon dioxide, a heat-trapping "greenhouse gas," have never been higher than when this croc walked the earth. Likewise, sea levels and temperatures stood at record levels. The climate was up to 15 degrees warmer, on average, than it is today. New Jersey was lush with mangroves. Although the Earth has changed dramatically, crocodiles have not. The Gloucester County creature, for example, resembles certain crocodiles in modern-day India and Africa - its remains a bony testament to the staying power of an animal that has evolved little since the time of the dinosaurs. -

Visions of the Prehistoric Past Reviewed by Mark P. Witton
Palaeontologia Electronica http://palaeo-electronica.org Paleoart: Visions of the Prehistoric Past Reviewed by Mark P. Witton Paleoart: Visions of the Prehistoric Past. 2017. Written by Zoë Lescaze and Walton Ford. Taschen. 292 pages, ISBN 978-3-8365-5511-1 (English edition). € 75, £75, $100 (hardcover) Paleoart: Visions of the Prehistoric Past is a collection of palaeoartworks spanning 150 years of palaeoart history, from 1830 to the second half of the 20th century. This huge, supremely well-pre- sented book was primarily written by journalist, archaeological illustrator and art scholar Zoë Les- caze, with an introduction by artist Walton Ford (both are American, and use ‘paleoart’ over the European spelling ‘palaeoart’). Ford states that the genesis of the book reflects “the need for a paleo- art book that was more about the art and less about the paleo” (p. 12), and thus Paleoart skews towards artistic aspects of palaeoartistry rather than palaeontological theory or technical aspects of reconstructing extinct animal appearance. Ford and Lescaze are correct that this angle of palaeo- artistry remains neglected, and this puts Paleoart in prime position to make a big impact on this pop- ular, though undeniably niche subject. Paleoart is extremely well-produced and stun- ning to look at, a visual feast for anyone with an interest in classic palaeoart. 292 pages of thick, sturdy paper (9 chapters, hundreds of images, and four fold outs) and almost impractical dimensions (28 x 37.4 cm) make it a physically imposing, stately tome that reminds us why books belong on shelves and not digital devices. Focusing exclu- sively on 2D art, the layout is minimalist and clean, detail, unobscured by text and labelling. -

Screaming Biplane Dromaeosaurs of the Air. June/July
5c.r~i~ ~l'tp.,ne pr~tl\USp.,urs 1tke.A-ir Written & illustrated by Gregory s. Paul It is questionable whether anyone even speculated that some dinosaurs were feathered until Ostrom detailed the evidence that birds descended from predatory avepod theropods a third of a century ago. The first illustration of a feathered dinosaur was a nice little study of a well ensconced Syntarsus dashing down a dune slope in pursuit of a gliding lizard in Robert Bakker's classic "Dinosaur Renaissance" article in the April 1975 Scientific American by Sarah Landry (can also be seen in the Scientific American Book of the Dinosaur I edited). My first feathered dinosaur was executed shortly after, an inappropriately shaggy Allosaurus attacking a herd of Diplodocus. I was soon doing a host of small theropods in feathers. Despite the logic of feath- / er insulation on the group ancestral birds and showing evidence of a high level energetics, images of feathered avepods were often harshly and unsci- Above: Proposed relationships based on flight adaptations of entifically criticized as unscientific in view of the lack of evidence for their preserved skeletons and feathers of Archaeopteryx, a generalized presence, ignoring the equal fact that no one had found scales on the little Sinornithosaurus, and Confuciusornis, with arrows indicating dinosaurs either. derived adaptations not present in Archaeopteryx as described in In the 1980s I further proposed that the most bird-like, avepectoran text. Not to scale. dinosaurs - dromaeosaurs, troodonts, oviraptorosaurs, and later ther- izinosaurs _were not just close to birds and the origin of flight, but were see- appear to represent the remnants of wings converted to display devices. -

Jason P. Schein
Curriculum Vitae JASON P. SCHEIN EXECUTIVE DIRECTOR BIGHORN BASIN PALEONTOLOGICAL INSTITUTE 3959 Welsh Road, Ste. 208 Willow Grove, Pennsylvania 19090 Office: (406) 998-1390 Cell: (610) 996-1055 [email protected] EDUCATION Ph.D. Student Drexel University, Department of Biology, Earth and Environmental Science, 2005-2013 M.Sc., Auburn University, Department of Geology and Geography, 2004 B.Sc., Auburn University, Department of Geology and Geography, 2000 RESEARCH AND PROFESSIONAL INTERESTS Mesozoic vertebrate marine and terrestrial faunas, paleoecology, paleobiogeography, faunistics, taphonomy, biostratigraphy, functional morphology, sedimentology, general natural history, education and outreach, paleontological resource assessment, and entrepreneurial academic paleontology. ACADEMIC, PROFESSIONAL, & BOARD POSITIONS 2019-Present Member of the Board, Yellowstone-Bighorn Research Association 2017-Present Founding Executive Director, Bighorn Basin Paleontological Institute 2017-Present Member of the Board, Delaware Valley Paleontological Society 2016-Present Scientific and Educational Consultant, Field Station: Dinosaurs 2015-Present Graduate Research Associate, Academy of Natural Sciences of Drexel University 2007-2017 Assistant Curator of Natural History Collections and Exhibits, New Jersey State Museum 2015-2017 Co-founder, Co-leader, Bighorn Basin Dinosaur Project 2010-2015 International Research Associate, Palaeontology Research Team, University of Manchester 2010-2014 Co-leader, New Jersey State Museum’s Paleontology Field Camp 2007-2009 Interim Assistant Curator of Natural History, New Jersey State Museum 2006-2007 Manager, Dinosaur Hall Fossil Preparation Laboratory 2004-2005 Staff Environmental Geologist, Cobb Environmental and Technical Services, Inc. 1 FIELD EXPERIENCE 2010-2019 Beartooth Butte, Morrison, Lance, and Fort Union formations, Bighorn Basin, Wyoming and Montana, U.S.A. (Devonian, Jurassic, Late Cretaceous, and earliest Paleocene, respectively) 2010 Hell Creek Formation, South Dakota, U.S.A. -

(PDF) Dinosaur Art: the World's Greatest Paleoart Steve White
(PDF) Dinosaur Art: The World'S Greatest Paleoart Steve White - download pdf free book pdf free download Dinosaur Art: The World's Greatest Paleoart, Free Download Dinosaur Art: The World's Greatest Paleoart Full Popular Steve White, by Steve White pdf Dinosaur Art: The World's Greatest Paleoart, full book Dinosaur Art: The World's Greatest Paleoart, Steve White epub Dinosaur Art: The World's Greatest Paleoart, PDF Dinosaur Art: The World's Greatest Paleoart Free Download, online free Dinosaur Art: The World's Greatest Paleoart, Download Dinosaur Art: The World's Greatest Paleoart PDF, Download Dinosaur Art: The World's Greatest Paleoart E-Books, Dinosaur Art: The World's Greatest Paleoart Ebooks, Free Download Dinosaur Art: The World's Greatest Paleoart Ebooks Steve White, Dinosaur Art: The World's Greatest Paleoart Ebooks, Read Dinosaur Art: The World's Greatest Paleoart Ebook Download, Download PDF Dinosaur Art: The World's Greatest Paleoart, Free Download Dinosaur Art: The World's Greatest Paleoart Full Version Steve White, Dinosaur Art: The World's Greatest Paleoart Full Download, by Steve White pdf Dinosaur Art: The World's Greatest Paleoart, Steve White ebook Dinosaur Art: The World's Greatest Paleoart, by Steve White pdf Dinosaur Art: The World's Greatest Paleoart, Read Dinosaur Art: The World's Greatest Paleoart Full Collection Steve White, CLICK FOR DOWNLOAD epub, mobi, pdf, kindle Description: The review included little on what I looked like and no word to say about how much that got in way of my head, only some mention from other readers those reading just knew who read The author was a real geek. -

View Preprint
A peer-reviewed version of this preprint was published in PeerJ on 11 June 2018. View the peer-reviewed version (peerj.com/articles/4973), which is the preferred citable publication unless you specifically need to cite this preprint. Brownstein CD. 2018. Trace fossils on dinosaur bones reveal ecosystem dynamics along the coast of eastern North America during the latest Cretaceous. PeerJ 6:e4973 https://doi.org/10.7717/peerj.4973 Theropod hindlimbs with feeding and other traces reveal ecosystem dynamics in the Maastrichtian of eastern North America Chase Brownstein Corresp. Corresponding Author: Chase Brownstein Email address: [email protected] Direct documentation of the ecology of past life is often rare when the fossil record is comparatively poor, as in the case of the terrestrial fauna of the Maastrichtian of eastern North America. Here, I describe a femur and partial tibia shaft assignable to theropods from the Maastrichtian Big Brook locality of New Jersey. The former, identifiable to a previously undetected morphotype of large ornithomimosaur, bears several scrapes identifiable as the feeding traces of sharks, adding to the collection of terrestrial vertebrate remains bearing such marks from the state. The latter is littered with tooth marks and punctures from possibly multiple crocodyliform individuals, the first documented occurrence of such traces on dinosaur bone from the Maastrichtian of the Atlantic Coastal Plain. Additionally, its surface is dotted with likely traces of invertebrates, revealing a microcosm of biological interaction from the Maastrichtian New Jersey shoreline. Previously, the massive Campanian crocodylian taxon Deinosuchus rugosus and the slightly smaller Cenomanian-age Texas crocodyliform Deltasuchus motherali have been shown as important drivers of terrestrial vertebrate taphonomy in eastern North America. -
Dinosaur Art Evolves with New Discoveries in Paleontology Amy Mcdermott, Science Writer
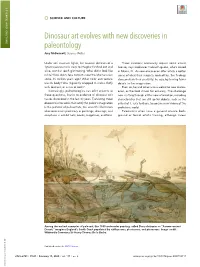
SCIENCE AND CULTURE SCIENCE AND CULTURE Dinosaur art evolves with new discoveries in paleontology Amy McDermott, Science Writer Under soft museum lights, the massive skeleton of a Those creations necessarily require some artistic Tyrannosaurus rex is easy to imagine fleshed out and license, says freelancer Gabriel Ugueto, who’s based alive, scimitar teeth glimmering. What did it look like in Miami, FL. As new discoveries offer artists a better in life? How did its face contort under the Montana sun sense of what their subjects looked like, the findings some 66 million years ago? What color and texture also constrain their creativity, he says, by leaving fewer was its body? Was it gauntly wrapped in scales, fluffy details to the imagination. with feathers, or a mix of both? Even so, he and other artists welcome new discov- Increasingly, paleontologists can offer answers to eries, as the field strives for accuracy. The challenge these questions, thanks to evidence of dinosaur soft now is sifting through all this new information, including tissues discovered in the last 30 years. Translating those characteristics that are still up for debate, such as the discoveries into works that satisfy the public’simagination extent of T. rex’s feathers, to conjure new visions of the is the purview of paleoartists, the scientific illustrators prehistoric world. who reconstruct prehistory in paintings, drawings, and Paleoartists often have a general science back- sculptures in exhibit halls, books, magazines, and films. ground or formal artistic training, although career Among the earliest examples of paleoart, this 1830 watercolor painting, called Duria Antiquior or “A more ancient Dorset,” imagines England’s South Coast populated by ichthyosaurs, plesiosaurs, and pterosaurs. -

The Paleontograph______
__________The Paleontograph________ A newsletter for those interested in all aspects of Paleontology Volume 8 Issue 1 March, 2019 _________________________________________________________________ From Your Editor Welcome to our latest edition. Happy Spring to you all. Well, we made it thru the winter pretty much okay here in CO. The weather here really is pretty nice with the "Bomb Cyclone" being the exception. I'm excited to be heading back east to the big fossil and mineral show in Edison, NJ., April 3-7. I usually run into many long time friends at this show. My booth "Lost World Fossils" is just inside the entrance. If you make it to the show, please stop by and say hello. I'm the old guy with the white beard. I have a note on the last page detailing an exciting new arrangement. We will soon have all back and future issues of The Paleontograph archived on the AAPS website. The Paleontograph was created in 2012 to continue what was originally the newsletter of The New Jersey Paleontological Society. The Paleontograph publishes articles, book reviews, personal accounts, and anything else that relates to Paleontology and fossils. Feel free to submit both technical and non-technical work. We try to appeal to a wide range of people interested in fossils. Articles about localities, specific types of fossils, fossil preparation, shows or events, museum displays, field trips, websites are all welcome. This newsletter is meant to be one by and for the readers. Issues will come out when there is enough content to fill an issue. I encourage all to submit contributions.