A Review and Practical Guide to In-Flight Calibration for Aircraft Turbulence Sensors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Inflight Data Collection N75-14745 Fob Ride Quality
NASA CR-127492 INFLIGHT DATA COLLECTION FOR RIDE QUALITY AND ATMOSPHERIC TURBULENCE RESEARCH Paul W. Kadlec and Roger G. Buckman Continental Air Lines, Inc. Los Angeles, California 90009 (NASA-CR-127492) INFLIGHT DATA COLLECTION N75-14745 FOB RIDE QUALITY AND ATMOSPHERIC TURBULENCE RESEARCH Final Report (Continental Airlines, Inc.) 57 p HC $4.25 CSCL 01C Unclas ..- - ___G3/0 5 05079 December 1974 Prepared for NASA FLIGHT RESEARCH CENTER P.O. Box 273 Edwards, California 93523 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. NASA CR-127492 4. Title and Subtitle 5. Report Date INFLIGHT DATA COLLECTION FOR RIDE QUALITY AND December 1974 ATMOSPHERIC TURBULENCE RESEARCH 6. Performing Organization Code 7. Author(s) 8. Performing Organization Report No. Paul W. Kadlec and Roger G. Buckman 10. Work Unit No. 9. Performing Organization Name and Address 504-29-21 Continental Air Lines, Inc. 11. Contract or Grant No. Los Angeles, California 90009 NAS 4-1982 13. Type of Report and Period Covered 12. Sponsoring Agency Name and Address Contractor Report - Final National Aeronautics and Space Administration 14. Sponsoring Agency Code Washington, D. C., 20546 H-876 15. Supplementary Notes NASA Technical Monitor: Shu W. Gee 16. Abstract In 1971 Continental Air Lines and the National Center for Atmospheric Research originated a joint program to study the genesis and nature of clear air turbulence. With the support of the NASA Flight Research Center, the program was expanded to include an investigation of the effects of atmospheric turbu- lence on passenger ride quality in a large wide-body commercial aircraft. -

Avidyne PFD & MFD Study Guide
Eric Gideon Avidyne Study Guide 1 of 7 General overview 1. Because we often rely on the MFD for navigational information, we need to make sure that the database is current with the most up-to- date information. 2. Diferences between glass and ‘steam gauge’ cockpits • OAT probe is now located on the underside of the left wing • Standby instruments • Airspeed • Attitude indicator • Altimeter • System is all electric – no vacuum system 3. Data sources • AHRS – Attitude Heading Ref- erence System • This computer collects and gives information to the Attitude Indicator and HSI. • Replaces the gyroscopic vacuum system • ADC – Air Data Computer • This computer collects and gives information to the Airspeed, VSI, and Altimeter. • Replaces the pitot/static system • These 2 computers are located in the PFD and make up the ADAHRS – Air Data and Attitude Heading Reference System • System must be aligned before flight • MFD uses external GPS to receive information for the flight display and position. • Probes get engine data directly. 4. Limitations • The PFD and MFD are not interchangeable and cannot share atti- tude or air data. • Don’t shut them down in flight, or AHRS won’t come back. Eric Gideon Avidyne Study Guide 2 of 7 Primary Flight Display (PFD) The Primary Flight Display is a 10.4 inch color LCD, with one knob and four bezel keys per side. Brightness is controlled with the rocker switch at top right. Attitude and air data – the PFD’s upper half 1. % power tape or tachometer 2. Autopilot Annunciation Area – Displays the autopilot annunciations 3. Airspeed Tape – Indicated airspeed with a range of 20-300 kts. -

Digital Air Data Computer Type Ac32
DIGITAL AIR DATA COMPUTER TYPE AC32 GENERAL THOMMEN is a leading manufacturer of Air Data Systems It also supports the Air Data for enhanced safety and aircraft instruments used worldwide on a full range infrastructure capabilities for Transponders and an ICAO aircraft types from helicopters to corporate turbine aircraft encoded altitude output is also available as an option. and commercial airliners. The AC32 measures barometric altitude, airspeed and temperature in the atmosphere with Its power supply is designed for 28 VDC. The low power integrated vibrating cylinder pressure sensors with high consumption of less than 7 Watts and its low weight of only accuracy and stability for both static and pitot ports. 2.2 Ibs (1000 grams) have been optimized for applications in state-of-the-art avionics suites. The extensive Built-in-Test The THOMMEN AC32 Digital Air Data Computer exceeds FAA capability guarantees safe operation. Technical Standard Order (TSO) and accuracy requirements. The computed air data parameters are transmitted via the The AC32 is designed to be modular which allows easy configurable ARINC 429 data bus. There are two ARINC 429 maintenance by the operator thanks to the RS232 transmit channels and two receive channels with which baro maintenance interface. The THOMMEN AC32 can be confi correction can be accomplished also. gured for different applications and has excellent hosting capabilities for supplying data to next generation equipment The AC32 meets the requirements for multiple platforms for without altering the system architecture. TAWS, ACAS/TCAS, EGPWS or FMS systems. For customized versions please contact THOMMEN AIRCRAFT EQUIPMENT AG sales department. -

Computer Aided Diagnosis of Technical Condition of the Swpl-1 Helmet Mounted Flight Parameters Display System
Journal of KONBiN 3(31)2014 ISSN 1895-8281 DOI 10.2478/jok-2014-0025 COMPUTER AIDED DIAGNOSIS OF TECHNICAL CONDITION OF THE SWPL-1 HELMET MOUNTED FLIGHT PARAMETERS DISPLAY SYSTEM KOMPUTEROWE DIAGNOZOWANIE STANU TECHNICZNEGO SYSTEMU NAHEŁMOWEGO WYŚWIETLANIA PARAMETRÓW LOTU SWPL-1 Sławomir Michalak, Jerzy Borowski, Andrzej Szelmanowski Air Force Institute of Technology e-mail: [email protected], [email protected], [email protected] Abstract: The paper presents selected results of the work carried out at the Air Force Institute of Technology (AFIT) in the scope of computer diagnostic tests of the SWPL-1 Cyklop helmet mounted flight parameters display system. This system has been designed in such a way that it warns the pilot of dangerous situations occurring on board the helicopter and threatening the flight safety (WARN) or faults (FAIL), which inform about a failure in given on-board equipment. The SWPL-1 system has been awarded the Prize of the President of the Republic of Poland during the 17. International Defense Industry Exhibition in Kielce. Keywords: flight parameters display systems, test methods Streszczenie: W artykule przedstawiono wybrane wyniki prac realizowanych w Instytucie Technicznym Wojsk Lotniczych (ITWL) w zakresie komputerowych badań diagnostycznych nahełmowego systemu wyświetlania parametrów lotu SWPL-1 Cyklop. System ten został zaprojektowany w taki sposób, aby alarmować pilota o wystąpieniu na pokładzie śmigłowca sytuacji niebezpiecznych, zagrażających bezpieczeństwu lotu (WARN) lub stanów awaryjnych (FAIL), informujących o niesprawności wybranych urządzeń pokładowych. Zbudowany system SWPL-1 otrzymał Nagrodę Prezydenta RP na XVII Międzynarodowym Salonie Przemysłu Obronnego MSPO’2009 w Kielcach. Słowa kluczowe: systemy wyświetlania parametrów lotu, metody badań 73 Computer aided diagnosis of technical condition of the SWPL-1 helmet mounted.. -

Aviation Glossary
AVIATION GLOSSARY 100-hour inspection – A complete inspection of an aircraft operated for hire required after every 100 hours of operation. It is identical to an annual inspection but may be performed by any certified Airframe and Powerplant mechanic. Absolute altitude – The vertical distance of an aircraft above the terrain. AD - See Airworthiness Directive. ADC – See Air Data Computer. ADF - See Automatic Direction Finder. Adverse yaw - A flight condition in which the nose of an aircraft tends to turn away from the intended direction of turn. Aeronautical Information Manual (AIM) – A primary FAA publication whose purpose is to instruct airmen about operating in the National Airspace System of the U.S. A/FD – See Airport/Facility Directory. AHRS – See Attitude Heading Reference System. Ailerons – A primary flight control surface mounted on the trailing edge of an airplane wing, near the tip. AIM – See Aeronautical Information Manual. Air data computer (ADC) – The system that receives and processes pitot pressure, static pressure, and temperature to present precise information in the cockpit such as altitude, indicated airspeed, true airspeed, vertical speed, wind direction and velocity, and air temperature. Airfoil – Any surface designed to obtain a useful reaction, or lift, from air passing over it. Airmen’s Meteorological Information (AIRMET) - Issued to advise pilots of significant weather, but describes conditions with lower intensities than SIGMETs. AIRMET – See Airmen’s Meteorological Information. Airport/Facility Directory (A/FD) – An FAA publication containing information on all airports, seaplane bases and heliports open to the public as well as communications data, navigational facilities and some procedures and special notices. -
Air Data Computers
TECHNOLOGY Air Data Computers BY KIM WIOLLAND PORTER-STRAIT INSTRUMENT CO. INC ir Data Computers have been The Beginning with us for many years now Initially, the main air data sensing A and have become increasingly application that concerned us was for more important, never more so then an altitude hold capability with the now as the RVSM mandate deadline autopilot. This “Altitude Capsule,” a approaches. The conventional aneroid simple aneroid just like an altimeter, pressure altimeter has been around is interfaced to a locking solenoid that for decades and is surprisingly accu- allows an error signal to be gener- Rockwell rate for a mechanical instrument. This Collinsʼ ated as the diaphragm changes with ADC-3000 instrument however will slowly lose altitude. All these capsules used gears, accuracy with increasing altitude. This cams, potentiometers and solenoids to eliminated these mechanical concerns. scale error is why they will not meet maintain a given altitude when com- Solid state pressure sensors and digital todayʼs stringent RVSM accuracy manded. In those days if the aircraft instruments are much more forgiving. requirements. The history of RVSM held within +/-100 feet, that was con- Current generation air data computers goes back further then you think, it sidered nominal, but then the accuracy have evolved into a separate sensor/ was first proposed in the mid–1950s would also vary at different altitudes. amplifier that provides a multitude of and again in 1973, and both times was These mechanically sensing instru- functions and information. rejected. With RVSM going into effect ments have at times been problems for The first generation of a Central Air this month, it will provide six new us all, failing to maintain proper pres- Data Computer (CADC) evolved out flight levels, increase airspace capac- sure rates on them during normal rou- of the Navy F14A Tomcat program in ity and most likely save hundreds of tine maintenance would cause undo the 1967-1969 time period. -
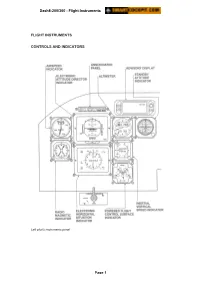
Dash8-200/300 - Flight Instruments
Dash8-200/300 - Flight Instruments FLIGHT INSTRUMENTS CONTROLS AND INDICATORS Left pilot’s instruments panel Page 1 Dash8-200/300 - Flight Instruments Right pilot’s instrument panel Page 2 Dash8-200/300 - Flight Instruments EADI EADI Attitude and heading reference system controller Page 3 Dash8-200/300 - Flight Instruments Airspeed indicator Page 4 Dash8-200/300 - Flight Instruments Primary altimeter Page 5 Dash8-200/300 - Flight Instruments Inertial vertical speed indicator with TCAS Page 6 Dash8-200/300 - Flight Instruments Radio magnetic indicator Page 7 Dash8-200/300 - Flight Instruments Stand-by attitude indicator Page 8 Dash8-200/300 - Flight Instruments IN MB 1021 Standby altimeter and standby magnetic compass Page 9 Dash8-200/300 - Flight Instruments or when button under glareshield is operated at the same time Davtron clock Page 10 Dash8-200/300 - Flight Instruments WX TERR EFIS controller Page 11 Dash8-200/300 - Flight Instruments WX TERR (WX/TERR) PUSH – displays (E)GPWS terrain map on the EHSI partial compass format PUSH – display will show EHSI data only, in partial compass format EFIS controller Page 12 Dash8-200/300 - Flight Instruments WX TERR EFIS controller Page 13 Dash8-200/300 - Flight Instruments Flight data recorder test switch Page 14 Dash8-200/300 - Flight Instruments Electronic Attitude Director Indicator (EADI) Page 15 Dash8-200/300 - Flight Instruments A LNAV or BC) Electronic Attitude Director Indicator (EADI) Page 16 Dash8-200/300 - Flight Instruments -- indicates active LNAV leg when selected Electronic Horizontal -
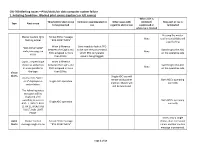
CRJ-700 Alerting Issues – Pitot/Static/Air Data Computer System Failure 1
CRJ-700 Alerting Issues – Pitot/static/air data computer system failure 1. Initiating Condition: Blocked pitot source (captain’s or left source) When alert is Threshold for alert or cue Confusion regarding alert or Other issues with inhibited/ How alert or cue is Type Alert or cue to be presented cue regard to alert or cue suppressed or terminated when cue is masked Pressing the master Master caution light, Yellow EICAS message None caution switchlight will flashing amber "EFIS COMP MON" stop flashing When difference Crew needs to look at PFD "EFIS COMP MON" between the Capt's and to be sure they understand Switching to the ADC amber message on None F/O's airspeed is more which EFIS comparator on the operative side EICAS than 10 kts. value is being flagged. Capt's. airspeed tape When difference shows an amber IAS between the Capt's and Switching to the ADC None in a box parallel to F/O's airspeed is more on the operative side Visual the tape than 10 kts. Alerts Single ADC loss will On the PFD, "ADC 1 render stick pusher Both ADC's operating or 2" displayed in Single ADC operation inactive. Shaker will correctly amber letters still be functional The following status messages will be displayed after switching to correct Both ADC's operating Single ADC operation ADC: L FADEC FAULT correctly (1 OR 2), SPLR/STAB FAULT, RUD LIMIT FAULT None, only a single Aural Master caution Yellow EICAS message chime, does not repeat Alerts message single chime "EFIS COMP MON" unless another caution message is presented. -

2.26. AIR DATA SYSTEM GENERAL the Air Data System
PILOT’S OPERATING HANDBOOK P.180 AVANTI II DESCRIPTION AND OPERATION AIR DATA SYSTEM 2.26. AIR DATA SYSTEM GENERAL The Air Data System is a dual (pilot‘s and copilot’s side) ADS-3000 system. Two Air Data Computers (ADC) are installed in the nose avionics bay. Each ADC receives data from the Pitot/Static System, the Total Air Temperature (TAT) probe, installed on the lower left side of the front fuselage, and the Angle of Attack (AOA) probe. Each ADC has also embedded pre-programmed airplane data on SSEC (Static Source Error Correction) and maximum allowable airspeed (VMO/MMO). The pilot’s and co-pilot’s side ADC and associated sensors are functionally isolated and each side acts as a self-contained, stand-alone system. Inputs to each ADC include operator/display inputs from the on-side Display Control Panel (DCP), reference inputs from the Integrated Avionics Processor System (IAPS) and alternate air data from the cross-side ADC. The ADCs supply processed air data to the Flight Guidance System (FGS), Attitude Heading Reference System (AHRS), Electronic Flight Instrument System (EFIS), Integrated Avionics Processor System (IAPS) and navigation equipment. The ADC processes the raw data, then sends digital air data to the Primary Flight Display (PFD) and other aircraft subsystems that use air data inputs, via the IAPS and system bus structure. A redundant system bus supplies the digital air data directly to the PFD and MFD. Processed air data provided by the ADC include: – uncorrected pressure altitude, – baro corrected altitude, – vertical speed (VS), – airspeed (IAS/CAS), – IAS trend, Mach, –VMO/MMO, – true airspeed (TAS), – total air temperature (TAT), – static air temperature (SAT) – International Standard Atmosphere (ISA) delta temperature. -

Development of Air Data Computation Function of a Combined Air Data and Aoa Computer
DEVELOPMENTOFAIRDATACOMPUTATIONFUNCTIONOFACOMBINEDAIR DATAANDAOACOMPUTER ATHESISSUBMITTEDTO THEGRADUATESCHOOLOFNATURALANDAPPLIEDSCIENCESOFÇANKAYA UNIVERSITY BY RAFETIL)IN INPARTIALFULLFILLMENTOFTHEREQUIREMENTS FOR THEDEGREEOFMASTEROFSCIENCE IN ELECTRONICSANDCOMMUNICATIONSENGINEERING SEPTEMBER,2011 ACKNOWLEDGEMENTS The author wishes to express his deepest gratitude to his supervisor Prof. Dr. Celal Ăŝŵ7> for his guidance, advice, criticism, encouragements and insight throughout the research. The author would also like to thank Mehmet Mustafa KARABULUT for his suggestions and comments iv ABSTRACT DEVELOPMENT OF AIR DATA COMPUTATION FUNCTION OF A COMBINED AIR DATA AND AOA COMPUTER />)/E, Rafet M.Sc., Department of Electronics and Communication Engineering ^ƵƉĞƌǀŝƐŽƌ͗WƌŽĨ͘ƌ͘ĞůĂůĂŝŵ7> September 2011, 51 Pages In this thesis, Air Data Computer part of a Combined Air Data System (CADS) and the simulator environment to test the developed CADS are developed on standard personal computers. Normally, a CADS system on an aircraft is composed of two separate equipments, the Air Data Computer (ADC) and the Angle of Attack (AOA) system. Therefore the developed CADS system combines both functionalities in an integral manner on a card. This approach not only reduces the volume but the total cost of the CADS system as well. Keywords: Avionic, System Integration, Flight Simulation, Software, Air Data Calculation, Sensor Simulation v Y dmD>b7<,ssZ7s,mhD/^/7>'7^zZ/ ,ssZ7 &KE<^7zKE>Z/HESAPLAMALARI '>7bd7ZDE>Z7 />)/E, Rafet zƺŬƐĞŬ>ŝƐĂŶƐ͕ůĞŬƚƌŽŶŝŬǀĞ,ĂďĞƌůĞƔŵĞDƺŚĞŶĚŝƐůŝŒŝŶĂďŝůŝŵĂůŦ -

FLIGHT INSTRUMENTS Table of Contents REV 3, May 03/05
Vol. 1 12--00--1 FLIGHT INSTRUMENTS Table of Contents REV 3, May 03/05 CHAPTER 12 --- FLIGHT INSTRUMENTS Page TABLE OF CONTENTS 12--00 Table of Contents 12--00--1 INTRODUCTION 12--10 Introduction 12--10--1 ELECTRONIC FLIGHT INSTRUMENT SYSTEM 12--20 Electronic Flight Instrument System 12--20--1 Display Reversion 12--20--2 Display Control 12--20--4 Comparator Function 12--20--8 System Circuit Breakers 12--20--11 AIR DATA SYSTEM 12--30 Air Data System 12--30--1 Pitot-Static System 12--30--1 Air Data 12--30--4 Air Data Reference Panels 12--30--6 Altitude Alerts 12--30--11 Acquisition Mode 12--30--13 Cross Side Tracking 12--30--13 Deviation Mode 12--30--13 Low Speed Cue 12--30--13 Air Data Reversion 12--30--15 System Circuit Breakers 12--30--16 RADIO ALTIMETER SYSTEM 12--40 Radio Altimeter System 12--40--1 System Circuit Breakers 12--40--5 ATTITUDE AND HEADING REFERENCE SYSTEM 12--50 Inertial Reference System <1025> 12--50--1 Display Reversion 12--50--6 Initialization and Alignment 12--50--9 System Circuit Breakers 12--50--11 STANDBY INSTRUMENTS AND CLOCKS 12--60 Standby Instruments and Clocks 12--60--1 Integrated Standby Instrument 12--60--1 Standby Compass 12--60--5 Clocks 12--60--6 System Circuit Breakers 12--60--8 Flight Crew Operating Manual CSP C--013--067 Vol. 1 12--00--2 FLIGHT INSTRUMENTS Table of Contents REV 3, May 03/05 LIST OF ILLUSTRATIONS ELECTRONIC FLIGHT INSTRUMENT SYSTEM Figure 12--20--1 EFIS -- General 12--20--1 Figure 12--20--2 Display Selection 12--20--2 Figure 12--20--3 Primary Flight Display and Multifonction Display -

CHAPTER 10 FLIGHT INSTRUMENTS Page TABLE OF
CHAPTER 10 FLIGHT INSTRUMENTS Page TABLE OF CONTENTS 10-00-01/02 DESCRIPTION General 10-10-01 Description 10-10-01 Controls and Indicators 10-10-02 COMPONENTS (Not Used) CONTROLS AND INDICATORS 10-30-01 FUNCTIONAL SCHEMATICS Pitot/Static System 10-40-01/02 Central Air Data Computer/Pitot Static Interface 10-40-03/04 JL Feb 1/75 10-00-01/02 FLIGHT INSTRUMENTS GENERAL temperature and position error) raw data from the pitot static system. The over- The flight instruments chapter includes speed warning sensor will activate an the pitot static system, the air data sys- aural warning device when limiting air- tem, and those basic flight instruments, speeds are reached. standby instruments, and related com- ponents which provide altitude, airspeed, Mach, vertical speed, true airspeed, DIRECTIONAL INDICATING SYSTEMS over speed warning, attitude, and air temperature data to the flight crew. Sensors provide inputs to three central There are two independent compass sys- air data computers where temperature tems. Each compass system is stabi- and instrument position corrective fac- lized by the associated directional gyro tors are applied as appropriate. The or inertial navigation system (INS) plat- flight recorder maintains a history of form (if installed). The compass system time-related flight parameters. can operate in the slaved (normal) mode or DG (unslaved) mode. The mode is DESCRIPTION selected by the COMPASS switch on the overhead panel. In the slaved mode the PITOT/STATIC SYSTEM compass is synchronized with a flux valve and provides magnetic heading. During normal operation, the pitot/static The synchronization indicator is on the system inputs variable pressure values overhead panel.