Development of Air Data Computation Function of a Combined Air Data and Aoa Computer
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Airspeed Indicator Calibration
TECHNICAL GUIDANCE MATERIAL AIRSPEED INDICATOR CALIBRATION This document explains the process of calibration of the airspeed indicator to generate curves to convert indicated airspeed (IAS) to calibrated airspeed (CAS) and has been compiled as reference material only. i Technical Guidance Material BushCat NOSE-WHEEL AND TAIL-DRAGGER FITTED WITH ROTAX 912UL/ULS ENGINE APPROVED QRH PART NUMBER: BCTG-NT-001-000 AIRCRAFT TYPE: CHEETAH – BUSHCAT* DATE OF ISSUE: 18th JUNE 2018 *Refer to the POH for more information on aircraft type. ii For BushCat Nose Wheel and Tail Dragger LSA Issue Number: Date Published: Notable Changes: -001 18/09/2018 Original Section intentionally left blank. iii Table of Contents 1. BACKGROUND ..................................................................................................................... 1 2. DETERMINATION OF INSTRUMENT ERROR FOR YOUR ASI ................................................ 2 3. GENERATING THE IAS-CAS RELATIONSHIP FOR YOUR AIRCRAFT....................................... 5 4. CORRECT ALIGNMENT OF THE PITOT TUBE ....................................................................... 9 APPENDIX A – ASI INSTRUMENT ERROR SHEET ....................................................................... 11 Table of Figures Figure 1 Arrangement of instrument calibration system .......................................................... 3 Figure 2 IAS instrument error sample ........................................................................................ 7 Figure 3 Sample relationship between -

Inflight Data Collection N75-14745 Fob Ride Quality
NASA CR-127492 INFLIGHT DATA COLLECTION FOR RIDE QUALITY AND ATMOSPHERIC TURBULENCE RESEARCH Paul W. Kadlec and Roger G. Buckman Continental Air Lines, Inc. Los Angeles, California 90009 (NASA-CR-127492) INFLIGHT DATA COLLECTION N75-14745 FOB RIDE QUALITY AND ATMOSPHERIC TURBULENCE RESEARCH Final Report (Continental Airlines, Inc.) 57 p HC $4.25 CSCL 01C Unclas ..- - ___G3/0 5 05079 December 1974 Prepared for NASA FLIGHT RESEARCH CENTER P.O. Box 273 Edwards, California 93523 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. NASA CR-127492 4. Title and Subtitle 5. Report Date INFLIGHT DATA COLLECTION FOR RIDE QUALITY AND December 1974 ATMOSPHERIC TURBULENCE RESEARCH 6. Performing Organization Code 7. Author(s) 8. Performing Organization Report No. Paul W. Kadlec and Roger G. Buckman 10. Work Unit No. 9. Performing Organization Name and Address 504-29-21 Continental Air Lines, Inc. 11. Contract or Grant No. Los Angeles, California 90009 NAS 4-1982 13. Type of Report and Period Covered 12. Sponsoring Agency Name and Address Contractor Report - Final National Aeronautics and Space Administration 14. Sponsoring Agency Code Washington, D. C., 20546 H-876 15. Supplementary Notes NASA Technical Monitor: Shu W. Gee 16. Abstract In 1971 Continental Air Lines and the National Center for Atmospheric Research originated a joint program to study the genesis and nature of clear air turbulence. With the support of the NASA Flight Research Center, the program was expanded to include an investigation of the effects of atmospheric turbu- lence on passenger ride quality in a large wide-body commercial aircraft. -

Avidyne PFD & MFD Study Guide
Eric Gideon Avidyne Study Guide 1 of 7 General overview 1. Because we often rely on the MFD for navigational information, we need to make sure that the database is current with the most up-to- date information. 2. Diferences between glass and ‘steam gauge’ cockpits • OAT probe is now located on the underside of the left wing • Standby instruments • Airspeed • Attitude indicator • Altimeter • System is all electric – no vacuum system 3. Data sources • AHRS – Attitude Heading Ref- erence System • This computer collects and gives information to the Attitude Indicator and HSI. • Replaces the gyroscopic vacuum system • ADC – Air Data Computer • This computer collects and gives information to the Airspeed, VSI, and Altimeter. • Replaces the pitot/static system • These 2 computers are located in the PFD and make up the ADAHRS – Air Data and Attitude Heading Reference System • System must be aligned before flight • MFD uses external GPS to receive information for the flight display and position. • Probes get engine data directly. 4. Limitations • The PFD and MFD are not interchangeable and cannot share atti- tude or air data. • Don’t shut them down in flight, or AHRS won’t come back. Eric Gideon Avidyne Study Guide 2 of 7 Primary Flight Display (PFD) The Primary Flight Display is a 10.4 inch color LCD, with one knob and four bezel keys per side. Brightness is controlled with the rocker switch at top right. Attitude and air data – the PFD’s upper half 1. % power tape or tachometer 2. Autopilot Annunciation Area – Displays the autopilot annunciations 3. Airspeed Tape – Indicated airspeed with a range of 20-300 kts. -

Joint Aviation Requirements JAR–FCL 1 ЛИЦЕНЗИРОВАНИЕ ЛЕТНЫХ ЭКИПАЖЕЙ (САМОЛЕТЫ)
Joint Aviation Requirements JAR–FCL 1 ЛИЦЕНЗИРОВАНИЕ ЛЕТНЫХ ЭКИПАЖЕЙ (САМОЛЕТЫ) Joint Aviation Authorities 1 JAR-FCL 1 ЛИЦЕНЗИРОВАНИЕ ЛЕТНЫХ ЭКИПАЖЕЙ (САМОЛЕТЫ) Издано 14 февраля 1997 года ПРЕДИСЛОВИЕ ПРЕАМБУЛА ЧАСТЬ 1 - ТРЕБОВАНИЯ ПОДЧАСТЬ A – ОБЩИЕ ТРЕБОВАНИЯ JAR-FCL 1.001 Определения и Сокращения JAR-FCL 1.005 Применимость JAR-FCL 1.010 Основные полномочия членов летного экипажа JAR-FCL 1.015 Признание свидетельств, допусков, разрешений, одобрений или сер- тификатов JAR-FCL 1.016 Кредит, предоставляемый владельцу свидетельства, полученного в государстве не члене JAA JAR-FCL 1.017 Разрешения/квалификационные допуски для специальных целей JAR-FCL 1.020 Учет военной службы JAR-FCL 1.025 Действительность свидетельств и квалификационных допусков JAR-FCL 1.026 Свежий опыт для пилотов, не выполняющих полеты в соответствии с JAR-OPS 1 JAR-FCL 1.030 Порядок тестирования JAR-FCL 1.035 Годность по состоянию здоровья JAR-FCL 1.040 Ухудшение состояния здоровья JAR-FCL 1.045 Особые обстоятельства JAR-FCL 1.050 Кредитование летного времени и теоретических знаний JAR-FCL 1.055 Организации и зарегистрированные предприятия JAR-FCL 1.060 Ограничение прав владельцев свидетельств, достигших 60-летнего возраста и более JAR-FCL 1.065 Государство выдачи свидетельства 2 JAR-FCL 1.070 Место обычного проживания JAR-FCL 1.075 Формат и спецификации свидетельств членов летных экипажей JAR-FCL 1.080 Учет летного времени Приложение 1 к JAR-FCL 1.005 Минимальные требования для выдачи свиде- тельства/разрешения JAR-FCL на основе нацио- нального свидетельства/разрешения, выданного в государстве-члене JAA. Приложение 1 к JAR-FCL 1.015 Минимальные требования для признания дейст- вительности свидетельств пилотов, выданных государствами не членами JAA. -

Digital Air Data Computer Type Ac32
DIGITAL AIR DATA COMPUTER TYPE AC32 GENERAL THOMMEN is a leading manufacturer of Air Data Systems It also supports the Air Data for enhanced safety and aircraft instruments used worldwide on a full range infrastructure capabilities for Transponders and an ICAO aircraft types from helicopters to corporate turbine aircraft encoded altitude output is also available as an option. and commercial airliners. The AC32 measures barometric altitude, airspeed and temperature in the atmosphere with Its power supply is designed for 28 VDC. The low power integrated vibrating cylinder pressure sensors with high consumption of less than 7 Watts and its low weight of only accuracy and stability for both static and pitot ports. 2.2 Ibs (1000 grams) have been optimized for applications in state-of-the-art avionics suites. The extensive Built-in-Test The THOMMEN AC32 Digital Air Data Computer exceeds FAA capability guarantees safe operation. Technical Standard Order (TSO) and accuracy requirements. The computed air data parameters are transmitted via the The AC32 is designed to be modular which allows easy configurable ARINC 429 data bus. There are two ARINC 429 maintenance by the operator thanks to the RS232 transmit channels and two receive channels with which baro maintenance interface. The THOMMEN AC32 can be confi correction can be accomplished also. gured for different applications and has excellent hosting capabilities for supplying data to next generation equipment The AC32 meets the requirements for multiple platforms for without altering the system architecture. TAWS, ACAS/TCAS, EGPWS or FMS systems. For customized versions please contact THOMMEN AIRCRAFT EQUIPMENT AG sales department. -

Computer Aided Diagnosis of Technical Condition of the Swpl-1 Helmet Mounted Flight Parameters Display System
Journal of KONBiN 3(31)2014 ISSN 1895-8281 DOI 10.2478/jok-2014-0025 COMPUTER AIDED DIAGNOSIS OF TECHNICAL CONDITION OF THE SWPL-1 HELMET MOUNTED FLIGHT PARAMETERS DISPLAY SYSTEM KOMPUTEROWE DIAGNOZOWANIE STANU TECHNICZNEGO SYSTEMU NAHEŁMOWEGO WYŚWIETLANIA PARAMETRÓW LOTU SWPL-1 Sławomir Michalak, Jerzy Borowski, Andrzej Szelmanowski Air Force Institute of Technology e-mail: [email protected], [email protected], [email protected] Abstract: The paper presents selected results of the work carried out at the Air Force Institute of Technology (AFIT) in the scope of computer diagnostic tests of the SWPL-1 Cyklop helmet mounted flight parameters display system. This system has been designed in such a way that it warns the pilot of dangerous situations occurring on board the helicopter and threatening the flight safety (WARN) or faults (FAIL), which inform about a failure in given on-board equipment. The SWPL-1 system has been awarded the Prize of the President of the Republic of Poland during the 17. International Defense Industry Exhibition in Kielce. Keywords: flight parameters display systems, test methods Streszczenie: W artykule przedstawiono wybrane wyniki prac realizowanych w Instytucie Technicznym Wojsk Lotniczych (ITWL) w zakresie komputerowych badań diagnostycznych nahełmowego systemu wyświetlania parametrów lotu SWPL-1 Cyklop. System ten został zaprojektowany w taki sposób, aby alarmować pilota o wystąpieniu na pokładzie śmigłowca sytuacji niebezpiecznych, zagrażających bezpieczeństwu lotu (WARN) lub stanów awaryjnych (FAIL), informujących o niesprawności wybranych urządzeń pokładowych. Zbudowany system SWPL-1 otrzymał Nagrodę Prezydenta RP na XVII Międzynarodowym Salonie Przemysłu Obronnego MSPO’2009 w Kielcach. Słowa kluczowe: systemy wyświetlania parametrów lotu, metody badań 73 Computer aided diagnosis of technical condition of the SWPL-1 helmet mounted.. -

FAHRZEUGTECHNIK Studiengang Flugzeugbau
fachhochschule hamburg FACHBEREICH FAHRZEUGTECHNIK Studiengang Flugzeugbau Berliner Tor 5 D - 20099 Hamburg in Zusammenarbeit mit: University of Limerick Department of Mechanical & Aeronautical Engineering Limerick, Ireland Diplomarbeit - Flugzeugbau - Development of an aircraft performance model for the prediction of trip fuel and trip time for a generic twin engine jet transport aircraft Verfasser: Gerold Straubinger Abgabedatum: 15.03.00 Betreuer: Trevor Young, Lecturer 1. Prüfer: Prof. Dr.-Ing. Dieter Scholz, MSME 2. Prüfer: Prof. Dr.-Ing. Hans-Jürgen Flüh Fahrzeugtechnik Abstract This report gives an overview of methods for aircraft performance calculations. After explain- ing the necessary background and the International Standard Atmosphere, it deals with a com- plete mission of a generic twin engine jet transport aircraft, including the required reserves of a diversion. Every part of the mission is considered. This includes climb, cruise, descent and hold. Equations for determining significant parameters of all parts are derived and differences between idealized calculations (based on mathematical performance models) and real ones (based on aircraft flight test data) are explained. A computer program has been written as a macro in Lotus 1-2-3, with data obtained during flights. In the main report simple flowcharts are given to illustrate the methods used. The pro- gram results show the required fuel and the time for an airliner of a certain weight performing a mission with a certain range. In the appendix all data and the flowcharts -

Introduction
CHAPTER 1 Introduction "For some years I have been afflicted with the belief that flight is possible to man." Wilbur Wright, May 13, 1900 1.1 ATMOSPHERIC FLIGHT MECHANICS Atmospheric flight mechanics is a broad heading that encompasses three major disciplines; namely, performance, flight dynamics, and aeroelasticity. In the past each of these subjects was treated independently of the others. However, because of the structural flexibility of modern airplanes, the interplay among the disciplines no longer can be ignored. For example, if the flight loads cause significant structural deformation of the aircraft, one can expect changes in the airplane's aerodynamic and stability characteristics that will influence its performance and dynamic behavior. Airplane performance deals with the determination of performance character- istics such as range, endurance, rate of climb, and takeoff and landing distance as well as flight path optimization. To evaluate these performance characteristics, one normally treats the airplane as a point mass acted on by gravity, lift, drag, and thrust. The accuracy of the performance calculations depends on how accurately the lift, drag, and thrust can be determined. Flight dynamics is concerned with the motion of an airplane due to internally or externally generated disturbances. We particularly are interested in the vehicle's stability and control capabilities. To describe adequately the rigid-body motion of an airplane one needs to consider the complete equations of motion with six degrees of freedom. Again, this will require accurate estimates of the aerodynamic forces and moments acting on the airplane. The final subject included under the heading of atmospheric flight mechanics is aeroelasticity. -

Aviation Glossary
AVIATION GLOSSARY 100-hour inspection – A complete inspection of an aircraft operated for hire required after every 100 hours of operation. It is identical to an annual inspection but may be performed by any certified Airframe and Powerplant mechanic. Absolute altitude – The vertical distance of an aircraft above the terrain. AD - See Airworthiness Directive. ADC – See Air Data Computer. ADF - See Automatic Direction Finder. Adverse yaw - A flight condition in which the nose of an aircraft tends to turn away from the intended direction of turn. Aeronautical Information Manual (AIM) – A primary FAA publication whose purpose is to instruct airmen about operating in the National Airspace System of the U.S. A/FD – See Airport/Facility Directory. AHRS – See Attitude Heading Reference System. Ailerons – A primary flight control surface mounted on the trailing edge of an airplane wing, near the tip. AIM – See Aeronautical Information Manual. Air data computer (ADC) – The system that receives and processes pitot pressure, static pressure, and temperature to present precise information in the cockpit such as altitude, indicated airspeed, true airspeed, vertical speed, wind direction and velocity, and air temperature. Airfoil – Any surface designed to obtain a useful reaction, or lift, from air passing over it. Airmen’s Meteorological Information (AIRMET) - Issued to advise pilots of significant weather, but describes conditions with lower intensities than SIGMETs. AIRMET – See Airmen’s Meteorological Information. Airport/Facility Directory (A/FD) – An FAA publication containing information on all airports, seaplane bases and heliports open to the public as well as communications data, navigational facilities and some procedures and special notices. -

Volume 2 – General Navigation (JAR Ref 061) Table of Contents
Volume 2 – General Navigation (JAR Ref 061) Table of Contents CHAPTER 1 The Form of the Earth Shape of the Earth ........................................................................................................................................1-1 The Poles......................................................................................................................................................1-2 East and West...............................................................................................................................................1-2 North Pole and South Pole ...........................................................................................................................1-2 Cardinal Directions........................................................................................................................................1-3 Great Circle...................................................................................................................................................1-3 Vertex of a Great Circle ................................................................................................................................1-4 Small Circle...................................................................................................................................................1-5 The Equator ..................................................................................................................................................1-5 Meridians ......................................................................................................................................................1-6 -
Air Data Computers
TECHNOLOGY Air Data Computers BY KIM WIOLLAND PORTER-STRAIT INSTRUMENT CO. INC ir Data Computers have been The Beginning with us for many years now Initially, the main air data sensing A and have become increasingly application that concerned us was for more important, never more so then an altitude hold capability with the now as the RVSM mandate deadline autopilot. This “Altitude Capsule,” a approaches. The conventional aneroid simple aneroid just like an altimeter, pressure altimeter has been around is interfaced to a locking solenoid that for decades and is surprisingly accu- allows an error signal to be gener- Rockwell rate for a mechanical instrument. This Collinsʼ ated as the diaphragm changes with ADC-3000 instrument however will slowly lose altitude. All these capsules used gears, accuracy with increasing altitude. This cams, potentiometers and solenoids to eliminated these mechanical concerns. scale error is why they will not meet maintain a given altitude when com- Solid state pressure sensors and digital todayʼs stringent RVSM accuracy manded. In those days if the aircraft instruments are much more forgiving. requirements. The history of RVSM held within +/-100 feet, that was con- Current generation air data computers goes back further then you think, it sidered nominal, but then the accuracy have evolved into a separate sensor/ was first proposed in the mid–1950s would also vary at different altitudes. amplifier that provides a multitude of and again in 1973, and both times was These mechanically sensing instru- functions and information. rejected. With RVSM going into effect ments have at times been problems for The first generation of a Central Air this month, it will provide six new us all, failing to maintain proper pres- Data Computer (CADC) evolved out flight levels, increase airspace capac- sure rates on them during normal rou- of the Navy F14A Tomcat program in ity and most likely save hundreds of tine maintenance would cause undo the 1967-1969 time period. -
Dash8-200/300 - Flight Instruments
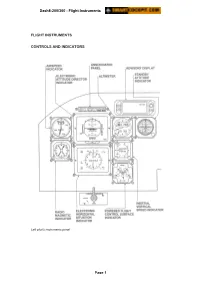
Dash8-200/300 - Flight Instruments FLIGHT INSTRUMENTS CONTROLS AND INDICATORS Left pilot’s instruments panel Page 1 Dash8-200/300 - Flight Instruments Right pilot’s instrument panel Page 2 Dash8-200/300 - Flight Instruments EADI EADI Attitude and heading reference system controller Page 3 Dash8-200/300 - Flight Instruments Airspeed indicator Page 4 Dash8-200/300 - Flight Instruments Primary altimeter Page 5 Dash8-200/300 - Flight Instruments Inertial vertical speed indicator with TCAS Page 6 Dash8-200/300 - Flight Instruments Radio magnetic indicator Page 7 Dash8-200/300 - Flight Instruments Stand-by attitude indicator Page 8 Dash8-200/300 - Flight Instruments IN MB 1021 Standby altimeter and standby magnetic compass Page 9 Dash8-200/300 - Flight Instruments or when button under glareshield is operated at the same time Davtron clock Page 10 Dash8-200/300 - Flight Instruments WX TERR EFIS controller Page 11 Dash8-200/300 - Flight Instruments WX TERR (WX/TERR) PUSH – displays (E)GPWS terrain map on the EHSI partial compass format PUSH – display will show EHSI data only, in partial compass format EFIS controller Page 12 Dash8-200/300 - Flight Instruments WX TERR EFIS controller Page 13 Dash8-200/300 - Flight Instruments Flight data recorder test switch Page 14 Dash8-200/300 - Flight Instruments Electronic Attitude Director Indicator (EADI) Page 15 Dash8-200/300 - Flight Instruments A LNAV or BC) Electronic Attitude Director Indicator (EADI) Page 16 Dash8-200/300 - Flight Instruments -- indicates active LNAV leg when selected Electronic Horizontal