Computational and Experimental Study on Performance of Sails of a Yacht
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 4: Immersed Body Flow [Pp
MECH 3492 Fluid Mechanics and Applications Univ. of Manitoba Fall Term, 2017 Chapter 4: Immersed Body Flow [pp. 445-459 (8e), or 374-386 (9e)] Dr. Bing-Chen Wang Dept. of Mechanical Engineering Univ. of Manitoba, Winnipeg, MB, R3T 5V6 When a viscous fluid flow passes a solid body (fully-immersed in the fluid), the body experiences a net force, F, which can be decomposed into two components: a drag force F , which is parallel to the flow direction, and • D a lift force F , which is perpendicular to the flow direction. • L The drag coefficient CD and lift coefficient CL are defined as follows: FD FL CD = 1 2 and CL = 1 2 , (112) 2 ρU A 2 ρU Ap respectively. Here, U is the free-stream velocity, A is the “wetted area” (total surface area in contact with fluid), and Ap is the “planform area” (maximum projected area of an object such as a wing). In the remainder of this section, we focus our attention on the drag forces. As discussed previously, there are two types of drag forces acting on a solid body immersed in a viscous flow: friction drag (also called “viscous drag”), due to the wall friction shear stress exerted on the • surface of a solid body; pressure drag (also called “form drag”), due to the difference in the pressure exerted on the front • and rear surfaces of a solid body. The friction drag and pressure drag on a finite immersed body are defined as FD,vis = τwdA and FD, pres = pdA , (113) ZA ZA Streamwise component respectively. -

Chapter 4: Immersed Body Flow [Pp
MECH 3492 Fluid Mechanics and Applications Univ. of Manitoba Fall Term, 2017 Chapter 4: Immersed Body Flow [pp. 445-459 (8e), or 374-386 (9e)] Dr. Bing-Chen Wang Dept. of Mechanical Engineering Univ. of Manitoba, Winnipeg, MB, R3T 5V6 When a viscous fluid flow passes a solid body (fully-immersed in the fluid), the body experiences a net force, F, which can be decomposed into two components: a drag force F , which is parallel to the flow direction, and • D a lift force F , which is perpendicular to the flow direction. • L The drag coefficient CD and lift coefficient CL are defined as follows: FD FL CD = 1 2 and CL = 1 2 , (112) 2 ρU A 2 ρU Ap respectively. Here, U is the free-stream velocity, A is the “wetted area” (total surface area in contact with fluid), and Ap is the “planform area” (maximum projected area of an object such as a wing). In the remainder of this section, we focus our attention on the drag forces. As discussed previously, there are two types of drag forces acting on a solid body immersed in a viscous flow: friction drag (also called “viscous drag”), due to the wall friction shear stress exerted on the • surface of a solid body; pressure drag (also called “form drag”), due to the difference in the pressure exerted on the front • and rear surfaces of a solid body. The friction drag and pressure drag on a finite immersed body are defined as FD,vis = τwdA and FD, pres = pdA , (113) ZA ZA Streamwise component respectively. -

Upwind Sail Aerodynamics : a RANS Numerical Investigation Validated with Wind Tunnel Pressure Measurements I.M Viola, Patrick Bot, M
Upwind sail aerodynamics : A RANS numerical investigation validated with wind tunnel pressure measurements I.M Viola, Patrick Bot, M. Riotte To cite this version: I.M Viola, Patrick Bot, M. Riotte. Upwind sail aerodynamics : A RANS numerical investigation validated with wind tunnel pressure measurements. International Journal of Heat and Fluid Flow, Elsevier, 2012, 39, pp.90-101. 10.1016/j.ijheatfluidflow.2012.10.004. hal-01071323 HAL Id: hal-01071323 https://hal.archives-ouvertes.fr/hal-01071323 Submitted on 8 Oct 2014 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. I.M. Viola, P. Bot, M. Riotte Upwind Sail Aerodynamics: a RANS numerical investigation validated with wind tunnel pressure measurements International Journal of Heat and Fluid Flow 39 (2013) 90–101 http://dx.doi.org/10.1016/j.ijheatfluidflow.2012.10.004 Keywords: sail aerodynamics, CFD, RANS, yacht, laminar separation bubble, viscous drag. Abstract The aerodynamics of a sailing yacht with different sail trims are presented, derived from simulations performed using Computational Fluid Dynamics. A Reynolds-averaged Navier- Stokes approach was used to model sixteen sail trims first tested in a wind tunnel, where the pressure distributions on the sails were measured. -
![Airfoil Boundary Layer Separation Prediction [Pdf]](https://docslib.b-cdn.net/cover/7450/airfoil-boundary-layer-separation-prediction-pdf-657450.webp)
Airfoil Boundary Layer Separation Prediction [Pdf]
Airfoil Boundary Layer Separation Prediction A project present to The Faculty of the Department of Aerospace Engineering San Jose State University in partial fulfillment of the requirements for the degree Master of Science in Aerospace Engineering By Kartavya Patel May 2014 approved by Dr. Nikos Mourtos Faculty Advisor ABSTRACT Airfoil Boundary Layer Separation Prediction by Kartavya Patel This project features a MatLab complied program that predicts airfoil boundary layer separation. The Airfoil Boundary Layer Separation program uses NACA 4 series, 5 series and custom coordinates to generate the airfoil geometry. It then uses Hess-Smith Panel Method to generate the pressure distribution. It will use the pressure distribution profile to display the boundary layer separation point based on Falkner-Skan Solution, Stratford’s Criterion for Laminar Boundary Layer and Stratford’s Criterion for Turbulent Boundary Layer. From comparison to Xfoil, it can be determined that for low angle of attacks the laminar flow separation point can be predicted from Stratford’s LBL criterion and the turbulent flow separation point can be predicted from Stratford’s TBL criterion. For high angle of attacks, the flow separation point can be predicted from Falkner-Skan Solution. The program requires MatLab Compiler Runtime version 8.1 (MCR) which can be downloaded free at http://www.mathworks.com/products/compiler/mcr/ . ACKNOWLEDGEMENTS I would like to thank Dr. Nikos Mourtos for his support and guidance throughout this project. I would also like to thank Hai Le, Tommy Blackwell and Ian Dupzyk for their contribution in previous project “Determination of Flow Separation Point on NACA Airfoils at Different Angles of Attack by Coupling the Solution of Panel Method with Three Different Separation Criteria”. -

Turbulent Boundary Layer Separation (Nick Laws)
NICK LAWS TURBULENT BOUNDARY LAYER SEPARATION TURBULENT BOUNDARY LAYER SEPARATION OUTLINE ▸ What we know about Boundary Layers from the physics ▸ What the physics tell us about separation ▸ Characteristics of turbulent separation ▸ Characteristics of turbulent reattachment TURBULENT BOUNDARY LAYER SEPARATION TURBULENT VS. LAMINAR BOUNDARY LAYERS ▸ Greater momentum transport creates a greater du/dy near the wall and therefore greater wall stress for turbulent B.L.s ▸ Turbulent B.L.s less sensitive to adverse pressure gradients because more momentum is near the wall ▸ Blunt bodies have lower pressure drag with separated turbulent B.L. vs. separated laminar TURBULENT BOUNDARY LAYER SEPARATION TURBULENT VS. LAMINAR BOUNDARY LAYERS Kundu fig 9.16 Kundu fig 9.21 laminar separation bubbles: natural ‘trip wire’ TURBULENT BOUNDARY LAYER SEPARATION BOUNDARY LAYER ASSUMPTIONS ▸ Simplify the Navier Stokes equations ▸ 2D, steady, fully developed, Re -> infinity, plus assumptions ▸ Parabolic - only depend on upstream history TURBULENT BOUNDARY LAYER SEPARATION BOUNDARY LAYER ASSUMPTIONS TURBULENT BOUNDARY LAYER SEPARATION PHYSICAL PRINCIPLES OF FLOW SEPARATION ▸ What we can infer from the physics TURBULENT BOUNDARY LAYER SEPARATION BOUNDARY LAYER ASSUMPTIONS ▸ Eliminate the pressure gradient TURBULENT BOUNDARY LAYER SEPARATION WHERE THE BOUNDARY LAYER EQUATIONS GET US ▸ Boundary conditions necessary to solve: ▸ Inlet velocity profile u0(y) ▸ u=v=0 @ y = 0 ▸ Ue(x) or Pe(x) ▸ Turbulent addition: relationship for turbulent stress ▸ Note: BL equ.s break down -

Lift Forces in External Flows
• DECEMBER 2019 Lift Forces in External Flows Real External Flows – Lesson 3 Lift • We covered the drag component of the fluid force acting on an object, and now we will discuss its counterpart, lift. • Lift is produced by generating a difference in the pressure distribution on the “top” and “bottom” surfaces of the object. • The lift acts in the direction normal to the free-stream fluid motion. • The lift on an object is influenced primarily by its shape, including orientation of this shape with respect to the freestream flow direction. • Secondary influences include Reynolds number, Mach number, the Froude number (if free surface present, e.g., hydrofoil) and the surface roughness. • The pressure imbalance (between the top and bottom surfaces of the object) and lift can increase by changing the angle of attack (AoA) of the object such as an airfoil or by having a non-symmetric shape. Example of Unsteady Lift Around a Baseball • Rotation of the baseball produces a nonuniform pressure distribution across the ball ‐ clockwise rotation causes a floater. Flow ‐ counterclockwise rotation produces a sinker. • In soccer, you can introduce spin to induce the banana kick. Baseball Pitcher Throwing the Ball Soccer Player Kicking the Ball Importance of Lift • Like drag, the lift force can be either a benefit Slats or a hindrance depending on objectives of a Flaps fluid dynamics application. ‐ Lift on a wing of an airplane is essential for the airplane to fly. • Flaps and slats are added to a wing design to maintain lift when airplane reduces speed on its landing approach. ‐ Lift on a fast-driven car is undesirable as it Spoiler reduces wheel traction with the pavement and makes handling of the car more difficult and less safe. -

Studies of Mast Section Aerodynamics by Arvel Gentry
Studies of Mast Section Aerodynamics By Arvel Gentry Proceedings of the 7th AIAA Symposium on the Aero/Hydronautics of Sailing January 31, 1976 Long Beach, California Abstract This paper summarizes the studies that were conducted with the objective of obtaining a mast-section shape with improved aerodynamic flow properties for use on the 12-Meter Courageous. TheDecember project 1999 consisted of a theoretical study defining the basic aerodynamics of the mast-mainsail combination followed by both analytical and experimental studies of various mast-section shapes. A new 12-Meter mast-section shape evolved from these studies that demonstrated significantly improved airflow patterns around the mast and mainsail when compared directly with the conventional 12-Meter elliptical section. This new mast shape was used in constructing the mast for Courageous used in the successful 1974 defense of the America's cup against the Australian challenger Southern Cross. 1. Introduction The mast has always been thought of as being an Bill Ficker, who skippered Intrepid in the 1970 defense, was undesirable but necessary appendage on a sailboat. It slated to be the skipper of the new aluminum Courageous. holds the sails up but contributes considerable drag and Ficker and David Pedrick (S&S project engineer on disturbs the airflow over the mainsail so that its efficiency Courageous) wondered if a new mast-section shape might is greatly reduced. This popular belief has led to a number lead to improved boat performance. This paper describes of different approaches in improving the overall efficiency the work done in attempting to answer that question. of a sailing rig. -

Adaptive Separation Control of a Laminar Boundary Layer Using
J. Fluid Mech. (2020), vol. 903, A21. © The Author(s), 2020. 903 A21-1 Published by Cambridge University Press doi:10.1017/jfm.2020.546 Adaptive separation control of a laminar https://doi.org/10.1017/jfm.2020.546 . boundary layer using online dynamic mode decomposition Eric A. Deem1, Louis N. Cattafesta III1,†,MaziarS.Hemati2, Hao Zhang3, Clarence Rowley3 and Rajat Mittal4 1Mechanical Engineering, Florida State University, Tallahassee, FL 32310, USA 2Aerospace Engineering and Mechanics, University of Minnesota, Minneapolis, MN 55455, USA https://www.cambridge.org/core/terms 3Mechanical and Aerospace Engineering, Princeton University, Princeton, NJ 08544, USA 4Mechanical Engineering, Johns Hopkins University, Baltimore, MD 21218, USA (Received 18 November 2019; revised 13 April 2020; accepted 22 June 2020) Adaptive control of flow separation based on online dynamic mode decomposition (DMD) is formulated and implemented on a canonical separated laminar boundary layer via a pulse-modulated zero-net mass-flux jet actuator located just upstream of separation. Using a linear array of thirteen flush-mounted microphones, dynamical characteristics of the separated flow subjected to forcing are extracted by online DMD. This method provides updates of the modal characteristics of the separated flow while forcing is applied at a rate commensurate with the characteristic time scales of the flow. In particular, online DMD provides a time-varying linear estimate of the nonlinear evolution of the controlled , subject to the Cambridge Core terms of use, available at flow without any prior knowledge. Using this adaptive model, feedback control is then implemented in which the linear quadratic regulator gains are computed recursively. This physics-based, autonomous approach results in more efficient flow reattachment compared with commensurate open-loop control. -
Flow Over Immerced Bodies
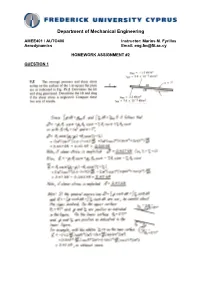
Department of Mechanical Engineering AMEE401 / AUTO400 Instructor: Marios M. Fyrillas Aerodynamics Email: [email protected] HOMEWORK ASSIGNMENT #2 QUESTION 1 Clearly there are two mechanisms responsible for the drag and the lift, the pressure and the shear stress: The drag force and the lift force on an object can be obtained by: Dpcos d Aw sin d A Lpsin d A w cos d A LIFT: Most common lift-generating devices (i.e., airfoils, fans, spoilers on cars, etc.) operate in the large Reynolds number range in which the flow has a boundary layer character, with viscous effects confined to the boundary layers and wake regions. For such cases the wall shear stress, w , contributes little to the lift. Most of the lift comes from the surface pressure distribution, as justified through Bernoulli’s equation. For objects operating in very low Reynolds number regimes (i.e. Re 1) viscous effects are important, and the contribution of the shear stress to the lift may be as important as that of the pressure. Such situations include the flight of minute insects and the swimming of microscopic organisms. DRAG: Similarly, when flow separation occurs, i.e. a blunt body or a streamlined body at a large angle of attack, the major component of the drag force is pressure differential due to the low pressure in the flow separation region. On the ultimately streamlined body (a zero thickness flat plate parallel to the flow) the drag is entirely due to the shear stress at the surface (boundary layers) and, is relatively small. -

Numerical Investigation of the Turbulent Wake-Boundary Interaction in a Translational Cascade of Airfoils and Flat Plate
energies Article Numerical Investigation of the Turbulent Wake-Boundary Interaction in a Translational Cascade of Airfoils and Flat Plate Xiaodong Ruan 1,*, Xu Zhang 1, Pengfei Wang 2 , Jiaming Wang 1 and Zhongbin Xu 3 1 State Key Laboratory of Fluid Power and Mechatronic Systems, Zhejiang University, Hangzhou 310027, China; [email protected] (X.Z.); [email protected] (J.W.) 2 School of Engineering, Zhejiang University City College, Hangzhou 310015, China; [email protected] 3 Institute of Process Equipment, Zhejiang University, Hangzhou 310027, China; [email protected] * Correspondence: [email protected]; Tel.: +86-1385-805-3612 Received: 24 July 2020; Accepted: 27 August 2020; Published: 31 August 2020 Abstract: Rotor stator interaction (RSI) is an important phenomenon influencing performances in the pump, turbine, and compressor. In this paper, the correlation-based transition model is used to study the RSI phenomenon between a translational cascade of airfoils and a flat plat. A comparison was made between computational results and experimental results. The computational boundary layer velocity is in reasonable agreement with the experimental velocity. The thickness of boundary layer decreases as the RSI frequency increases and it increases as the fluid flows downstream. The spectral plots of velocity fluctuations at leading edge x/c = 2 under RSI partial flow condition f = 20 Hz and f = 30 Hz are dominated by a narrowband component. RSI frequency mainly affects the turbulence intensity in the freestream region. However, it has little influence on the turbulence intensity of boundary layer near the wall. A secondary vortex is induced by the wake–boundary layer interaction and it leads to the formation of a thickened laminar boundary layer. -

The Dynamics of Static Stall
16th Int Symp on Applications of Laser Techniques to Fluid Mechanics Lisbon, Portugal, 09-12 July, 2012 The Dynamics of Static Stall Karen Mulleners1∗, Arnaud Le Pape2, Benjamin Heine1, Markus Raffel1 1: Helicopter Department, German Aerospace Centre (DLR), Göttingen, Germany 2: Applied Aerodynamics Department, ONERA, The French Aerospace Lab, Meudon, France * Current address: Institute of Turbomachinery and Fluid Dynamics, Leibniz Universität Hannover, Germany, [email protected] Abstract The dynamic process of flow separation on a stationary airfoil in a uniform flow was investigated experimentally by means of time-resolved measurements of the velocity field and the airfoil’s surface pressure distribution. The unsteady movement of the separation point, the growth of the separated region, and surface pressure fluctuations were examined in order to obtain information about the chronology of stall development. The early inception of stall is characterised with the abrupt upstream motion of the separation point. During subsequent stall development, large scale shear layer structures are formed and grow while travelling down- stream. This leads to a gradual increase of the separated flow region reaching his maximum size at the end of stall development which is marked by a significant lift drop. 1 Introduction Stall on lifting surfaces is a commonly encountered, mostly undesired, condition in aviation that occurs when a critical angle of attack is exceeded. At low angles of attack a, lift increases linearly with a. At higher angles of attack an adverse pressure gradient builds up on the airfoil’s suction side which eventually forces the flow to separate and the lift to drop. -

Flow Separation Patterns in a 60-Degree Junction
Advances in Fluid Mechanics VII 173 Flow separation patterns in a 60-degree junction K. Alhussan Space Research Institute, King Abdulaziz City for Science and Technology, Saudi Arabia Abstract The work to be presented herein is a theoretical and numerical analysis of the complex fluid mechanism that occurs inside a 60o-junction shape specifically with regard to the boundary layer separation, vortex shedding and generation of wake. The boundary layer separates from the surface, forms a free shear layer and is highly unstable. This shear layer will eventually roll into a discrete vortex and detach from the surface. A periodic flow motion will develop in the wake as a result of boundary layer vortices being shed from the solid boundary. The periodic nature of the vortex shedding phenomenon can sometimes lead to unwanted structural vibrations, especially when the shedding frequency matches one of the resonant frequencies of the structure. A number of important conclusions follow from the current research. First, the study of the actual flow configuration inside 60o-junction shape offers some insight into the complex flow phenomena. Second, the characteristics of the boundary layer separation, the vortex and wake change considerably with the divergent angle. This research shows that downstream, away from the junction, the boundary layer reattaches and normal flow occurs, i.e. the effect of the boundary layer separation is only local. Nevertheless fluid downstream of the junction will have lost energy. The results show that downstream, away from the junction, the boundary layer reattaches and normal flow occurs, i.e. the effect of the boundary layer separation is only local.