Optics Reference
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Location of Cardinal Points from the ABCD Matrix for the General Optical System
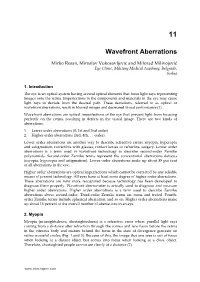
EE482 Fall 2000 Handout #2 Page 1 Location of Cardinal Points from the ABCD Matrix for the General Optical System I II n1 n2 F1 P1 N1 P2 N2 F2 f1 f2 Figure 1 Cardinal points of a system which is characterized by an ABCD matrix between an input plane I and an output plane II. Cardinal Point Measured Function Special Case From To (n1=n2) First Focal Point P1 F1 -n1/(n2C)-1/C First Principle Point I P1 (n1-n2D)/(n2C)(1-D)/C First Nodal Point I N1 (1-D)/C (1-D)/C Second Focal Point P2 F2 -1/C -1/C Second Principle Point II P2 (1-A)/C (1-A)/C Second Nodal Point II N2 (n1-n2A)/(n2C)(1-A)/C Table 1 When analyzing an optical system, we often are first interested in basic properties of the system such as the focal length (or optical power of the system) and the location of the focal planes, etc. In the limit of paraxial optics, any optical system, from a simple lens to a combination of lenses, mirrors and ducts, can be described in terms of six special surfaces, called the cardinal surfaces of the system. In paraxial optics, these surfaces are planes, normal to the optical axis. The point where the plane intersects the optical axis is the cardinal point corresponding to that cardinal plane. The six special planes are: First Focal Plane Second Focal Plane First Principle Plane Second Principle Plane First Nodal Plane Second Nodal Plane Once we know the location of these special planes, relative to the physical location of the lenses in the system, we can describe all of the paraxial imaging properties of the system. -

Optical Performance:: Characterization of a Pupillometric Camera
RELATED TITLES Documents Science & Tech Tech Digital & Social Media 58 views 0 0 Abb Uploaded by Mabel Ruiz AP-Physical Low Light Manual Twilight Retrato Science Sample Photography for Render 1.4.5 Aberration document explaining the Seidel coefficients Full description Save Embed Share Print S-118.4250 PPOSTGRADUATE SEMINAR ON ILLUMINATION ENGINEERING ,, SSPRING 2008 LLIGHTING UUNIT,, DDEPARTMENT OF EELECTRONICS,, HHELSINKI UUNIVERSITY OF TTECHNOLOGY (TKK) OPTICAL PERFORMANCE:: CHARACTERIZATION OF A PUPILLOMETRIC CAMERA Petteri Teikari,, [email protected] Emmi Rautkylä,, emmi.rautkylä@tkk.fi RELATED TITLES Documents Science & Tech Tech Digital & Social Media 58 views 0 0 Abb Uploaded by Mabel Ruiz AP-Physical Low Light Manual Twilight Retrato Science Sample Photography for Render 1.4.5 Aberration document explaining the Seidel coefficients Full description Save Embed Share Print RELATED TITLES Documents Science & Tech Tech Digital & Social Media 58 views 0 0 Abb Uploaded by Mabel Ruiz AP-Physical Low Light Manual Twilight Retrato Science Sample Photography for Render 1.4.5 Aberration document explaining the Seidel coefficients Full description Save Embed Share Print TABLE OF CONTENTS A A BSTRACT .................................................................................................................................. TT ABLE OF CONTENTS ................................................................................................................2 11 IINTRODUCTION.................................................................................................................3 -

Wavefront Control Simulations for the Giant Magellan Telescope: Field-Dependent Segment Piston Control
Wavefront control simulations for the Giant Magellan Telescope: Field-dependent segment piston control Fernando Quir´os-Pachecoa, Rodolphe Conana, Brian McLeodb, Benjamin Irarrazavala, and Antonin Boucheza aGMTO Organization, 465 North Halstead St, Suite 250, Pasadena, CA 91107, USA bSmithsonian Astrophysical Observatory, 60 Garden St, MS 20, Cambridge, MA 02138, USA ABSTRACT We present in this paper preliminary simulation results aimed at validating the GMT piston control strategy. We will in particular consider an observing mode in which an Adaptive Optics (AO) system is providing fast on-axis WF correction with the Adaptive Secondary Mirror (ASM), while the phasing system using multiple Segment Piston Sensors (SPS) makes sure that the seven GMT segments remain phased. Simulations have been performed with the Dynamic Optical Simulation (DOS) tool developed at the GMT Project Office, which integrates the optical and mechanical models of GMT. DOS fast ray-tracing capabilities allows us to properly simulate the effect of field-dependent aberrations, and in particular, the so-called Field Dependent Segment Piston (FDSP) mode arising when a segment tilt on M1 is compensated on-axis by a segment tilt on M2. We will show that when using an asterism of SPS, our scheme can properly control both segment piston and the FDSP mode. Keywords: Giant Magellan Telescope, phasing, wavefront control, numerical simulations 1. INTRODUCTION The Giant Magellan Telescope (GMT)1 is a 25.4m diameter aplanatic Gregorian telescope that will be located at the Las Campanas Observatory (LCO), in Chile. The GMT is a segmented telescope, with a primary mirror (M1) composed of seven circular 8.4m segments. -

Zernike Piston Statistics in Turbulent Multi-Aperture Optical Systems
Air Force Institute of Technology AFIT Scholar Theses and Dissertations Student Graduate Works 3-2020 Zernike Piston Statistics in Turbulent Multi-Aperture Optical Systems Joshua J. Garretson Follow this and additional works at: https://scholar.afit.edu/etd Part of the Optics Commons Recommended Citation Garretson, Joshua J., "Zernike Piston Statistics in Turbulent Multi-Aperture Optical Systems" (2020). Theses and Dissertations. 3161. https://scholar.afit.edu/etd/3161 This Thesis is brought to you for free and open access by the Student Graduate Works at AFIT Scholar. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of AFIT Scholar. For more information, please contact [email protected]. ZERNIKE PISTON STATISTICS IN TURBULENT MULTI-APERTURE OPTICAL SYSTEMS THESIS Joshua J. Garretson, Capt, USAF AFIT-ENG-MS-20-M-023 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY AIR FORCE INSTITUTE OF TECHNOLOGY Wright-Patterson Air Force Base, Ohio DISTRIBUTION STATEMENT A APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED. The views expressed in this document are those of the author and do not reflect the official policy or position of the United States Air Force, the United States Department of Defense or the United States Government. This material is declared a work of the U.S. Government and is not subject to copyright protection in the United States. AFIT-ENG-MS-20-M-023 ZERNIKE PISTON STATISTICS IN TURBULENT MULTI-APERTURE OPTICAL SYSTEMS THESIS Presented to the Faculty Department of Electrical and Computer Engineering Graduate School of Engineering and Management Air Force Institute of Technology Air University Air Education and Training Command in Partial Fulfillment of the Requirements for the Degree of Master of Science in Electrical Engineering Joshua J. -
Wavefront Aberrations
11 Wavefront Aberrations Mirko Resan, Miroslav Vukosavljević and Milorad Milivojević Eye Clinic, Military Medical Academy, Belgrade, Serbia 1. Introduction The eye is an optical system having several optical elements that focus light rays representing images onto the retina. Imperfections in the components and materials in the eye may cause light rays to deviate from the desired path. These deviations, referred to as optical or wavefront aberrations, result in blurred images and decreased visual performance (1). Wavefront aberrations are optical imperfections of the eye that prevent light from focusing perfectly on the retina, resulting in defects in the visual image. There are two kinds of aberrations: 1. Lower order aberrations (0, 1st and 2nd order) 2. Higher order aberrations (3rd, 4th, … order) Lower order aberrations are another way to describe refractive errors: myopia, hyperopia and astigmatism, correctible with glasses, contact lenses or refractive surgery. Lower order aberrations is a term used in wavefront technology to describe second-order Zernike polynomials. Second-order Zernike terms represent the conventional aberrations defocus (myopia, hyperopia and astigmatism). Lower order aberrations make up about 85 per cent of all aberrations in the eye. Higher order aberrations are optical imperfections which cannot be corrected by any reliable means of present technology. All eyes have at least some degree of higher order aberrations. These aberrations are now more recognized because technology has been developed to diagnose them properly. Wavefront aberrometer is actually used to diagnose and measure higher order aberrations. Higher order aberrations is a term used to describe Zernike aberrations above second-order. Third-order Zernike terms are coma and trefoil. -

(S15) Joseph A
Optical Design (S15) Joseph A. Shaw – Montana State University The Wave-Front Aberration Polynomial Ideal imaging systems perform point-to-point imaging. This requires that a spherical wave front expanding from each object point (o) is converted to a spherical wave front converging to a corresponding image point (o’). However, real optical systems produce an imperfect “aberrated” image. The aberrated wave front indicated by the solid red line below corresponds to rays near the axis focusing near point a and rays near the margin of the pupil focusing near point b. optical system o b a o’ W(x,y) = awf –rs entrance pupil exit pupil The “wave front aberration function” describes the optical path difference between the aberrated wave front and a spherical reference wave (typically measured in m or “waves”). W(x,y) = aberrated wave front – spherical reference wave front 1 Optical Design (S15) Joseph A. Shaw – Montana State University Coordinate System The unique rotationally invariant combinations of the exit-pupil and image-plane coordinates shown below are x2 + y2, x + yand All others are combinations of these. y x exit pupil image plane For rotationally symmetric optical systems, we can choose the “meridional” plane as our plane of symmetry so that we only need to consider rays that pass through the pupil in the plane. Then = 0 and our variables become the following … = 0 → x2 + y2, y We now convert to circular coordinates in the pupil plane and replace with to match Geary. y x2 + y2 → 2 = normalized exit-pupil radius y → cos = exit-pupil angle from meridional plane → = normalized height of ray intersection in image plane exit pupil image plane 2 Optical Design (S15) Joseph A. -

Lens Design OPTI 517 Seidel Aberration Coefficients
Lens Design OPTI 517 Seidel aberration coefficients Prof. Jose Sasian OPTI 517 Fourth-order terms 2 2 W H, W040 W131H W222 H 2 W220 H H W311H H H W400 H H Spherical aberration Coma Astigmatism (cylindrical aberration!) Field curvature Distortion Piston Prof. Jose Sasian OPTI 517 Coordinate system Prof. Jose Sasian OPTI 517 Spherical aberration h 2 h 4 Z 2r 8r 3 u h y1 y 2r W n'[PB'] n'[PA' ] n'[PB'] n[PB] We have a spherical surface of radius of curvature r, a ray intersecting the surface at point P, intersecting the reference sphere at B’, intersecting the wavefront in object space at B and in image space at A’, and passing in image space by the point Q’’ in the optical axis. The reference sphere in object space is centered at Q and in image space is centered at Q’ Question: how do we draw the first order Prof. Jose Sasian OPTI 517 marginal ray in image space? [PQ]2 s Z 2 h 2 s 2 2sZ Z 2 h 2 2 4 4 2 h h h h 2s 3 2 2r 8r 4r [PB] [OQ] [PQ] s 2 1 2 2 s h 2 1 1 h 4 1 1 h 4 1 1 2 2 s r 8r s r 8s s r 2 4 2 h s h s s 1 1 1 u s 2 r 4r 2 s 2 r h y1 y 2r Prof. Jose Sasian OPTI 517 Spherical aberration ' ' [PB] [OQ] [PQ] [PB'] [OQ ] [PQ ] 2 2 2 4 y 2 u 1 1 y 4 1 1 y u 1 1 y 1 1 1 y 1 y ' 2 ' 2 2 2r s r 8r s r 2 2r s r 8r s r 4 2 4 2 y 1 1 y 1 1 8s ' s ' r 8s s r W n '[PB'] n[PB] y 2 u 1 1 1 1 1 y n ' n ' 2 r s r s r y 4 1 1 1 1 n ' n 2 ' 8r s r s r 2 2 y 4 n ' 1 1 n 1 1 ' ' 8 s s r s s r Prof. -

Lens Design I – Seminar 1
Y. Sekman, X. Lu, H. Gross Friedrich Schiller University Jena Institute of Applied Physics Albert-Einstein-Str 15 07745 Jena Lens Design I – Seminar 1 Exercise 1-1: Stair-mirror-setup (Homework) Setup a system with a stair mirror pair, which decenters an incoming collimated ray bundle with 10 mm diameter by 40 mm in the -y direction. The wavelength of the beam is = 632.8 nm. After this pair of mirrors, a decentered main objective lens with focal length f = 200 mm made of BK7 is located 25 mm below the optical axis and focusses the beam. a) Setup the system b) Generate layout drawings in 2D and in 3D. c) Calculate the beam cross section on the second mirror, what is the size of the pattern? d) Determine the optimal final sensor plane location. Calculate the spot of the focused beam. Discuss the shape of this pattern. Exercise 1-2: Symmetrical 4f-system Setup a telecentric 4f-imaging system with two identical plano-convex lenses made of BK7 with thickness d = 10 mm and approximate focal lengths f = 100 mm. The wavelength of the system is = 546.07 nm and the numerical aperture in the object space is NA = 0.2. The object has a diameter of 10 mm. a) If the setup is perfectly symmetrical, determine the layout and the spot diagram of the system. b) Optimize the image location. Why is the spot size improved? c) If the starting aperture is decreased, the system becomes more and more close to diffraction limited. What is the value of the NA to get a diffraction limited system on axis? Take in mind here, that a re-focussing might be necessary due to the lowered spherical aberrations, which depends on the aperture. -

Automated Aberration Extraction Using Phase Wheel Targets Lena Zavyalova, Anatoly Bourov, Bruce W
Automated aberration extraction using phase wheel targets Lena Zavyalova, Anatoly Bourov, Bruce W. Smith Rochester Institute of Technology, 82 Lomb Memorial Dr., Rochester, NY 14623 ABSTRACT An approach to in-situ wavefront aberration measurement is explored. The test is applicable to sensing aberrations from the image plane of a microlithography projection system or a mask inspection tool. A set of example results is presented which indicate that the method performs well on lenses with a Strehl ratio above 0.97. The method uses patterns produced by an open phase figure1 to determine the deviation of the target image from its ideal shape due to aberrations. A numerical solution in the form of Zernike polynomial coefficients is reached by modeling the object interaction with aberrated pupil function using the nonlinear optimization routine over the possible deformations to give an accurate account of the image detail in 2-D. The numerical accuracy for the example below indicated superb performance of the chosen target shapes with only a single illumination setup. Keywords: aberrations, phase wheel, lithography 1. INTRODUCTION Aberrations are directly related to loss of contrast in the image. Modern lithography lenses require optical path tolerances on the order of several nanometers over extremely large apertures. If the primary aberrations are well- corrected, it is important to know how much wavefront distortion remains. Higher order aberrations are therefore of consequence due to their increased contribution to the total root mean square (rms) wavefront error in large pupils. Measuring the optical aberrations in microlithography projection systems, such as stepper or aerial image microscope, when working from the image space is not trivial. -

Solution of Exercises Lecture Optical Design with Zemax for Phd – Part 8
2013-06-17 Prof. Herbert Gross Friedrich Schiller University Jena Institute of Applied Physics Albert-Einstein-Str 15 07745 Jena Solution of Exercises Lecture Optical design with Zemax for PhD – Part 8 8.1 Multi configuration, universal plot and slider Load a classical achromate with a focal length of f = 100 mm, no field and numerical aperture NA = 0.1 from one of the vendor catalogs. Fix the wavelength to = 546.07 nm. a) Add a thin mensicus shaped lens behind the system with an arteficial refractive index of n = 2 to enlarge the numerical aperture by a factor of 2 without introducing spherical aberration. To achieve this, the surfaces must be aplanatic and concentric. b) Now reduce the numerical aperture to a diameter of 2 mm and set a folding mirror in the front focal plane of the system. The incoming beam should be come from below and is deflected to the right side. c) Generate a multi-configuration system for a scan system by rotating the mirror. The first coordinate break angle can take the values -50°, -47.5°, -45°, -42.5° and -40°. The second coordinate break should be defined by a pick up with a resulting bending angle of the system axis of -90°. d) The chief ray of the scan system is telecentric in the paraxial approximation. Due to the residual aberrations of the system, there is a deviation from the telecentricity in the real system. Show this by a correponding universal plot. e) Show the variation of the spot in the image plane by using the slider. -

Opti 415/515
Opti 415/515 Introduction to Optical Systems 1 Copyright 2009, William P. Kuhn Optical Systems Manipulate light to form an image on a detector. Point source microscope Hubble telescope (NASA) 2 Copyright 2009, William P. Kuhn Fundamental System Requirements • Application / Performance – Field-of-view and resolution – Illumination: luminous, sunlit, … – Wavelength – Aperture size / transmittance – Polarization, – Coherence –… • Producibility: – Size, weight, environment, … – Production volume –Cost –… • Requirements are interdependent, and must be physically plausible: – May want more pixels at a faster frame rate than available detectors provide, – Specified detector and resolution requires a focal length and aperture larger than allowed package size. – Depth-focus may require F/# incompatible with resolution requirement. • Once a plausible set of performance requirements is established, then a set optical system specifications can be created. 3 Copyright 2009, William P. Kuhn Optical System Specifications First Order requirements Performance Requirements • Object distance __________ • MTF vs. FOV __________ • Image distance __________ • RMS wavefront __________ • F/number or NA __________ • Encircled energy __________ • Full field-of-view __________ • Distortion % __________ • Focal length __________ •Detector – Type Mechanical Requirements – Dimensions ____________ • Back focal dist. __________ – Pixel size ____________ • Length & diameter __________ – # of pixels ____________ • Total track __________ – Format ____________ • Wavelength -

Graphical Construction of Cardinal Points from the Transference WF Harris
S Afr Optom 2011 70(1) 3-13 Graphical construction of cardinal points from the transference WF Harris Department of Optometry, University of Johannesburg, PO Box 524, Auckland Park, 2006 South Africa <[email protected]> Received 21 December 2010; revised version accepted 24 February 2011 Abstract fected by changes in the system or when a second optical system is placed in front of the first. The Usually nodal, principal and focal points are de- paper illustrates the graphical procedure by apply- fined independently and thought of as distinct struc- ing it in several situations of interest in optometry tures with no simple relationship among them. By and ophthalmology, including the effect of a con- adopting a holistic approach, in which these three tact lens or refractive surgery on a reduced eye types of cardinal points are treated as particular and the effect of accommodation, a spectacle lens cases of a larger class of special points, this paper and an afocal telescope on the Gullstrand-Emsley develops a method of constructing the locations of schematic eye. (S Afr Optom 2011 70(1) 3-13) the cardinal points of a system graphically directly from the transference. The method provides a use- Key words: Cardinal point, nodal point, principal ful way of visualising the relationship of the loca- point, focal point, transference tions of the cardinal points and of how they are af- Introduction the system from which one can obtain the positions of the individual cardinal points by construction. The The purpose of this paper is to show how one can slopes and cutting points of the straight lines come obtain the locations of cardinal and other special directly from the entries of the system’s transference.