Wavefront Control Simulations for the Giant Magellan Telescope: Field-Dependent Segment Piston Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Zernike Piston Statistics in Turbulent Multi-Aperture Optical Systems
Air Force Institute of Technology AFIT Scholar Theses and Dissertations Student Graduate Works 3-2020 Zernike Piston Statistics in Turbulent Multi-Aperture Optical Systems Joshua J. Garretson Follow this and additional works at: https://scholar.afit.edu/etd Part of the Optics Commons Recommended Citation Garretson, Joshua J., "Zernike Piston Statistics in Turbulent Multi-Aperture Optical Systems" (2020). Theses and Dissertations. 3161. https://scholar.afit.edu/etd/3161 This Thesis is brought to you for free and open access by the Student Graduate Works at AFIT Scholar. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of AFIT Scholar. For more information, please contact [email protected]. ZERNIKE PISTON STATISTICS IN TURBULENT MULTI-APERTURE OPTICAL SYSTEMS THESIS Joshua J. Garretson, Capt, USAF AFIT-ENG-MS-20-M-023 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY AIR FORCE INSTITUTE OF TECHNOLOGY Wright-Patterson Air Force Base, Ohio DISTRIBUTION STATEMENT A APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED. The views expressed in this document are those of the author and do not reflect the official policy or position of the United States Air Force, the United States Department of Defense or the United States Government. This material is declared a work of the U.S. Government and is not subject to copyright protection in the United States. AFIT-ENG-MS-20-M-023 ZERNIKE PISTON STATISTICS IN TURBULENT MULTI-APERTURE OPTICAL SYSTEMS THESIS Presented to the Faculty Department of Electrical and Computer Engineering Graduate School of Engineering and Management Air Force Institute of Technology Air University Air Education and Training Command in Partial Fulfillment of the Requirements for the Degree of Master of Science in Electrical Engineering Joshua J. -
Wavefront Aberrations
11 Wavefront Aberrations Mirko Resan, Miroslav Vukosavljević and Milorad Milivojević Eye Clinic, Military Medical Academy, Belgrade, Serbia 1. Introduction The eye is an optical system having several optical elements that focus light rays representing images onto the retina. Imperfections in the components and materials in the eye may cause light rays to deviate from the desired path. These deviations, referred to as optical or wavefront aberrations, result in blurred images and decreased visual performance (1). Wavefront aberrations are optical imperfections of the eye that prevent light from focusing perfectly on the retina, resulting in defects in the visual image. There are two kinds of aberrations: 1. Lower order aberrations (0, 1st and 2nd order) 2. Higher order aberrations (3rd, 4th, … order) Lower order aberrations are another way to describe refractive errors: myopia, hyperopia and astigmatism, correctible with glasses, contact lenses or refractive surgery. Lower order aberrations is a term used in wavefront technology to describe second-order Zernike polynomials. Second-order Zernike terms represent the conventional aberrations defocus (myopia, hyperopia and astigmatism). Lower order aberrations make up about 85 per cent of all aberrations in the eye. Higher order aberrations are optical imperfections which cannot be corrected by any reliable means of present technology. All eyes have at least some degree of higher order aberrations. These aberrations are now more recognized because technology has been developed to diagnose them properly. Wavefront aberrometer is actually used to diagnose and measure higher order aberrations. Higher order aberrations is a term used to describe Zernike aberrations above second-order. Third-order Zernike terms are coma and trefoil. -

(S15) Joseph A
Optical Design (S15) Joseph A. Shaw – Montana State University The Wave-Front Aberration Polynomial Ideal imaging systems perform point-to-point imaging. This requires that a spherical wave front expanding from each object point (o) is converted to a spherical wave front converging to a corresponding image point (o’). However, real optical systems produce an imperfect “aberrated” image. The aberrated wave front indicated by the solid red line below corresponds to rays near the axis focusing near point a and rays near the margin of the pupil focusing near point b. optical system o b a o’ W(x,y) = awf –rs entrance pupil exit pupil The “wave front aberration function” describes the optical path difference between the aberrated wave front and a spherical reference wave (typically measured in m or “waves”). W(x,y) = aberrated wave front – spherical reference wave front 1 Optical Design (S15) Joseph A. Shaw – Montana State University Coordinate System The unique rotationally invariant combinations of the exit-pupil and image-plane coordinates shown below are x2 + y2, x + yand All others are combinations of these. y x exit pupil image plane For rotationally symmetric optical systems, we can choose the “meridional” plane as our plane of symmetry so that we only need to consider rays that pass through the pupil in the plane. Then = 0 and our variables become the following … = 0 → x2 + y2, y We now convert to circular coordinates in the pupil plane and replace with to match Geary. y x2 + y2 → 2 = normalized exit-pupil radius y → cos = exit-pupil angle from meridional plane → = normalized height of ray intersection in image plane exit pupil image plane 2 Optical Design (S15) Joseph A. -

Lens Design OPTI 517 Seidel Aberration Coefficients
Lens Design OPTI 517 Seidel aberration coefficients Prof. Jose Sasian OPTI 517 Fourth-order terms 2 2 W H, W040 W131H W222 H 2 W220 H H W311H H H W400 H H Spherical aberration Coma Astigmatism (cylindrical aberration!) Field curvature Distortion Piston Prof. Jose Sasian OPTI 517 Coordinate system Prof. Jose Sasian OPTI 517 Spherical aberration h 2 h 4 Z 2r 8r 3 u h y1 y 2r W n'[PB'] n'[PA' ] n'[PB'] n[PB] We have a spherical surface of radius of curvature r, a ray intersecting the surface at point P, intersecting the reference sphere at B’, intersecting the wavefront in object space at B and in image space at A’, and passing in image space by the point Q’’ in the optical axis. The reference sphere in object space is centered at Q and in image space is centered at Q’ Question: how do we draw the first order Prof. Jose Sasian OPTI 517 marginal ray in image space? [PQ]2 s Z 2 h 2 s 2 2sZ Z 2 h 2 2 4 4 2 h h h h 2s 3 2 2r 8r 4r [PB] [OQ] [PQ] s 2 1 2 2 s h 2 1 1 h 4 1 1 h 4 1 1 2 2 s r 8r s r 8s s r 2 4 2 h s h s s 1 1 1 u s 2 r 4r 2 s 2 r h y1 y 2r Prof. Jose Sasian OPTI 517 Spherical aberration ' ' [PB] [OQ] [PQ] [PB'] [OQ ] [PQ ] 2 2 2 4 y 2 u 1 1 y 4 1 1 y u 1 1 y 1 1 1 y 1 y ' 2 ' 2 2 2r s r 8r s r 2 2r s r 8r s r 4 2 4 2 y 1 1 y 1 1 8s ' s ' r 8s s r W n '[PB'] n[PB] y 2 u 1 1 1 1 1 y n ' n ' 2 r s r s r y 4 1 1 1 1 n ' n 2 ' 8r s r s r 2 2 y 4 n ' 1 1 n 1 1 ' ' 8 s s r s s r Prof. -

Automated Aberration Extraction Using Phase Wheel Targets Lena Zavyalova, Anatoly Bourov, Bruce W
Automated aberration extraction using phase wheel targets Lena Zavyalova, Anatoly Bourov, Bruce W. Smith Rochester Institute of Technology, 82 Lomb Memorial Dr., Rochester, NY 14623 ABSTRACT An approach to in-situ wavefront aberration measurement is explored. The test is applicable to sensing aberrations from the image plane of a microlithography projection system or a mask inspection tool. A set of example results is presented which indicate that the method performs well on lenses with a Strehl ratio above 0.97. The method uses patterns produced by an open phase figure1 to determine the deviation of the target image from its ideal shape due to aberrations. A numerical solution in the form of Zernike polynomial coefficients is reached by modeling the object interaction with aberrated pupil function using the nonlinear optimization routine over the possible deformations to give an accurate account of the image detail in 2-D. The numerical accuracy for the example below indicated superb performance of the chosen target shapes with only a single illumination setup. Keywords: aberrations, phase wheel, lithography 1. INTRODUCTION Aberrations are directly related to loss of contrast in the image. Modern lithography lenses require optical path tolerances on the order of several nanometers over extremely large apertures. If the primary aberrations are well- corrected, it is important to know how much wavefront distortion remains. Higher order aberrations are therefore of consequence due to their increased contribution to the total root mean square (rms) wavefront error in large pupils. Measuring the optical aberrations in microlithography projection systems, such as stepper or aerial image microscope, when working from the image space is not trivial. -
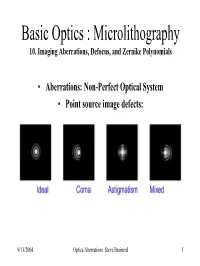
Basic Optics : Microlithography 10. Imaging Aberrations, Defocus, and Zernike Polynomials
Basic Optics : Microlithography 10. Imaging Aberrations, Defocus, and Zernike Polynomials • Aberrations: Non-Perfect Optical System • Point source image defects: 9/11/2004 Optics/Aberrations Steve Brainerd 1 Basic Optics : Microlithography 10. Imaging Aberrations, Defocus, and Zernike Polynomials • Aberrations result from a Non-Perfect Optical System • Definition of a perfect optical system: • 1. Every ray or a pencil of rays proceeding from a single object point must, after passing through the optical system converge to a single point of the image. There can be no difference between chief and marginal rays intersection in the image plane! Ray trace of simple converging lens: ray 1 = marginal ; ray 2 = chief; and ray 3 = focal 9/11/2004 Optics/Aberrations Steve Brainerd 2 Basic Optics : Microlithography 10. Imaging Aberrations, Defocus, and Zernike Polynomials • Definition of a perfect optical system: • 2. If the object is a plane surface perpendicular to the axis of the optical system, the image of any point on the object must also lie in a plane perpendicular to the axis. This means that flat objects must be imaged as flat images and curved objects as curved images. 9/11/2004 Optics/Aberrations Steve Brainerd 3 Basic Optics : Microlithography 10. Imaging Aberrations, Defocus, and Zernike Polynomials • Definition of a perfect optical system: • 3. An image must be similar to the object whether it’s linear dimensions are altered or not. This means that irregular magnification or minification cannot occur in various parts of the image relative to the object. IDEAL CASE BELOW: • Ray tracing using monochromatic light with image and object located on the optical axis and paraxial rays ( close to optic axis) typically meet this perfect image criteria. -

Basic Wavefront Aberration Theory for Optical Metrology
APPLIED OPTICS AND OPTICAL ENGINEERING, VOL. Xl CHAPTER 1 Basic Wavefront Aberration Theory for Optical Metrology JAMES C. WYANT Optical Sciences Center, University of Arizona and WYKO Corporation, Tucson, Arizona KATHERINE CREATH Optical Sciences Center University of Arizona, Tucson, Arizona I. Sign Conventions 2 II. Aberration-Free Image 4 III. Spherical Wavefront, Defocus, and Lateral Shift 9 IV. Angular, Transverse, and Longitudinal Aberration 12 V. Seidel Aberrations 15 A. Spherical Aberration 18 B. Coma 22 C. Astigmatism 24 D. Field Curvature 26 E. Distortion 28 VI. Zernike Polynomials 28 VII. Relationship between Zernike Polynomials and Third-Order Aberrations 35 VIII. Peak-to-Valley and RMS Wavefront Aberration 36 IX. Strehl Ratio 38 X. Chromatic Aberrations 40 XI. Aberrations Introduced by Plane Parallel Plates 40 XII. Aberrations of Simple Thin Lenses 46 XIII.Conics 48 A. Basic Properties 48 B. Spherical Aberration 50 C. Coma 51 D. Astigmatism 52 XIV. General Aspheres 52 References 53 1 Copyright © 1992 by Academic Press, Inc. All rights of reproduction in any form reserved. ISBN 0-12-408611-X 2 JAMES C. WYANT AND KATHERINE CREATH FIG. 1. Coordinate system. The principal purpose of optical metrology is to determine the aberra- tions present in an optical component or an optical system. To study optical metrology, the forms of aberrations that might be present need to be understood. The purpose of this chapter is to give a brief introduction to aberrations in an optical system. The goal is to provide enough information to help the reader interpret test results and set up optical tests so that the accessory optical components in the test system will introduce a minimum amount of aberration. -

Alignment Sensitivity of Reflective Optical Elements and Analysis Of
Alignment sensitivity of reflective optical elements and analysis of automated alignment methods Chris van Ewijk November 2017 Contents 1 Introduction 3 2 Introduction to optical aberrations 5 2.1 Zernike polynomials . 7 2.2 Common aberrations . 8 2.2.1 Piston . 8 2.2.2 Defocus . 9 2.2.3 Wavefront tilt . 10 2.2.4 Spherical aberration . 11 2.2.5 Coma . 12 2.2.6 Astigmatism . 13 2.2.7 Field curvature . 14 2.2.8 Distortion . 15 3 Alignment sensitivity analysis of standard mirror shapes 17 3.1 Zemax sensitivity analysis . 17 3.2 Results . 18 3.2.1 Parabolic mirror . 18 3.2.2 Spherical mirror . 20 3.2.3 Elliptical mirror . 22 3.2.4 Fold mirror . 24 3.3 Discussion . 26 4 Sensitivity table method 27 4.1 Testing method of the sensitivity table . 28 4.2 Results of the sensitivity table method . 28 4.3 Discussion . 29 5 Merit function regression method 30 5.1 Testing method of the merit function regression . 30 5.2 Results of the merit function regression method . 31 5.3 Discussion . 33 1 6 Differential Wavefront Sampling Method 34 6.1 Computation method . 35 6.2 Measurements and control uncertainties of DWS . 36 6.3 DWS for off-axis systems . 37 6.4 Discussion . 37 7 Conclusions 39 Appendices 41 A Detailed lens data of the OGSE Re-Imager 41 B Merit function used in the sensitivity table method 42 C Merit function regression method 43 2 1 Introduction The mission of SRON is to bring about breakthroughs in international space research. -
Introduction to Aberrations in Optical Imaging Systems
INTRODUCTION TO ABERRATIONS IN OPTICAL IMAGING SYSTEMS JOSE SASIÄN University of Arizona ШШ CAMBRIDGE Щ0 UNIVERSITY PRESS Contents Preface Acknowledgements Harold H. Hopkins Roland V. Shack Symbols 1 Introduction 1.1 Optical systems and imaging aberrations 1.2 Historical highlights References 2 Basic concepts in geometrical optics 2.1 Rays and wavefronts 2.2 Symmetry in optical imaging systems 2.3 The object and the image spaces 2.4 The aperture stop, the pupils, and the field stop 2.5 Significant planes and rays 2.6 The field and aperture vectors 2.7 Real, first-order, and paraxial rays 2.8 First-order ray invariants 2.9 Conventions for first-order ray tracing 2.10 First-order ray-trace example 2.11 Transverse ray errors 2.12 Stop shifting Exercises Further reading 3 Imaging with light rays 3.1 Collinear transformation viii Contents 3.2 Gaussian imaging equations 28 3.3 Newtonian imaging equations 29 3.4 Derivation of the collinear transformation equations 30 3.5 Cardinal points and planes 31 3.6 First-order rays' congruence with the collinear transformation 32 3.7 The camera obscura 33 3.8 Review of linear shift-invariant systems theory 33 3.9 Imaging with a camera obscura 35 3.10 Optical transfer function of the camera obscura 36 3.11 The modulation transfer function and image contrast 38 3.12 Summary 39 Exercises 40 Further reading 40 4 Imaging with light waves 41 4.1 Spherical, oblique, and plane waves 41 4.2 Light diffraction by an aperture 43 4.3 Far-field diffraction 47 4.4 Diffraction by a circular aperture 49 4.5 Action of an -
Optics Reference
Optics Software for Layout and Optimization Optics Reference Rev: June 2005 Lambda Research Corporation 25 Porter Road Littleton, MA 01460 Tel: 978-486-0766 Fax: 978-486-0755 [email protected] COPYRIGHT The OSLO software and Optics Reference are Copyright © 2001 by Lambda Research Corporation. All rights reserved. TRADEMARKS Oslo® is a registered trademark of Lambda Research Corporation. TracePro® is a registered trademark of Lambda Research Corporation. GENII® is a registered trademark of Sinclair Optics, Inc. UltraEdit® is a registered trademark of IDM Computer Solutions, Inc. Adobe® and Acrobat® are registered trademarks of Adobe Systems, Inc. Pentium® is a registered trademark of Intel, Inc. Windows® 95, Windows® 98, Windows NT®, Windows® 2000 and Microsoft® are either registered trademarks or trademarks of Microsoft Corporation in the United States and/or other countries Table of Contents Table of Contents................................................................................ 4 Chapter 1 Quick Start ................................................................... 10 Main window ..................................................................................................... 11 Title bar........................................................................................................... 11 Menu bar......................................................................................................... 11 Main tool bar ................................................................................................. -

Piston Control with Adaptive Optics in Stellar Interferometry
A&A 365, 314–323 (2001) Astronomy DOI: 10.1051/0004-6361:20000185 & c ESO 2001 Astrophysics Piston control with adaptive optics in stellar interferometry Application to the GI2T interferometer and bimorph mirrors C. V´erinaud1 and F. Cassaing2 1 Observatoire de la Cˆote d’Azur (OCA), D´epartement Fresnel, 2130, route de l’Observatoire, 06460 Saint-Vallier-de-Thiey, France e-mail: [email protected] 2 Office National d’Etudes´ et de Recherches A´erospatiales (ONERA), DOTA, BP 72, 92322 Chˆatillon Cedex, France e-mail: [email protected] Received 29 August 2000 / Accepted 18 October 2000 Abstract. The general purpose of an adaptive optics system is to correct for the wavefront corrugations due to atmospheric turbulence. When applied to a stellar interferometer, care must be taken in the control of the mean optical path length, commonly called differential piston. This paper defines a general formalism for the piston control of a deformable mirror in the linear regime. It is shown that the usual filtering of the piston mode in the command space is not sufficient, mostly in the case of a bimorph mirror. Another algorithm is proposed to cancel in the command space the piston produced in the pupil space. This analysis is confirmed by simulations in the case of the GI2T interferometer located on Plateau de Calern, France. The contrast of the interference fringes is severely reduced in the case of a classical wavefront correction, even in short exposures, but is negligible with our algorithm, assuming a realistic calibration of the mirror. For this purpose, a simple concept for the calibration of the piston induced by a deformable mirror is proposed. -
Imaging and Aberration Theory
Imaging and Aberration Theory Lecture 4: Aberration expansions 2018-11-08 Herbert Gross Winter term 2019 www.iap.uni-jena.de 2 Schedule - Imaging and aberration theory 2019 1 18.10. Paraxial imaging paraxial optics, fundamental laws of geometrical imaging, compound systems Pupils, Fourier optics, pupil definition, basic Fourier relationship, phase space, analogy optics and 2 25.10. Hamiltonian coordinates mechanics, Hamiltonian coordinates Fermat principle, stationary phase, Eikonals, relation rays-waves, geometrical 3 01.11. Eikonal approximation, inhomogeneous media single surface, general Taylor expansion, representations, various orders, stop 4 08.11. Aberration expansions shift formulas different types of representations, fields of application, limitations and pitfalls, 5 15.11. Representation of aberrations measurement of aberrations phenomenology, sph-free surfaces, skew spherical, correction of sph, aspherical 6 22.11. Spherical aberration surfaces, higher orders phenomenology, relation to sine condition, aplanatic sytems, effect of stop 29.11. 7 Distortion and coma position, various topics, correction options 8 06.12. Astigmatism and curvature phenomenology, Coddington equations, Petzval law, correction options Dispersion, axial chromatical aberration, transverse chromatical aberration, 9 13.12. Chromatical aberrations spherochromatism, secondary spectrum Sine condition, aplanatism and Sine condition, isoplanatism, relation to coma and shift invariance, pupil 10 20.12. isoplanatism aberrations, Herschel condition, relation to Fourier optics 11 10.01. Wave aberrations definition, various expansion forms, propagation of wave aberrations special expansion for circular symmetry, problems, calculation, optimal balancing, 12 17.01. Zernike polynomials influence of normalization, measurement 13 24.01. Point spread function ideal psf, psf with aberrations, Strehl ratio 14 31.01. Transfer function transfer function, resolution and contrast Vectorial aberrations, generalized surface contributions, Aldis theorem, intrinsic 15 07.02.