The Vector Potential
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
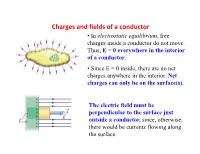
Charges and Fields of a Conductor • in Electrostatic Equilibrium, Free Charges Inside a Conductor Do Not Move
Charges and fields of a conductor • In electrostatic equilibrium, free charges inside a conductor do not move. Thus, E = 0 everywhere in the interior of a conductor. • Since E = 0 inside, there are no net charges anywhere in the interior. Net charges can only be on the surface(s). The electric field must be perpendicular to the surface just outside a conductor, since, otherwise, there would be currents flowing along the surface. Gauss’s Law: Qualitative Statement . Form any closed surface around charges . Count the number of electric field lines coming through the surface, those outward as positive and inward as negative. Then the net number of lines is proportional to the net charges enclosed in the surface. Uniformly charged conductor shell: Inside E = 0 inside • By symmetry, the electric field must only depend on r and is along a radial line everywhere. • Apply Gauss’s law to the blue surface , we get E = 0. •The charge on the inner surface of the conductor must also be zero since E = 0 inside a conductor. Discontinuity in E 5A-12 Gauss' Law: Charge Within a Conductor 5A-12 Gauss' Law: Charge Within a Conductor Electric Potential Energy and Electric Potential • The electrostatic force is a conservative force, which means we can define an electrostatic potential energy. – We can therefore define electric potential or voltage. .Two parallel metal plates containing equal but opposite charges produce a uniform electric field between the plates. .This arrangement is an example of a capacitor, a device to store charge. • A positive test charge placed in the uniform electric field will experience an electrostatic force in the direction of the electric field. -

Maxwell's Equations
Maxwell’s Equations Matt Hansen May 20, 2004 1 Contents 1 Introduction 3 2 The basics 3 2.1 Static charges . 3 2.2 Moving charges . 4 2.3 Magnetism . 4 2.4 Vector operations . 5 2.5 Calculus . 6 2.6 Flux . 6 3 History 7 4 Maxwell’s Equations 8 4.1 Maxwell’s Equations . 8 4.2 Gauss’ law for electricity . 8 4.3 Gauss’ law for magnetism . 10 4.4 Faraday’s law . 11 4.5 Ampere-Maxwell law . 13 5 Conclusion 14 2 1 Introduction If asked, most people outside a physics department would not be able to identify Maxwell’s equations, nor would they be able to state that they dealt with electricity and magnetism. However, Maxwell’s equations have many very important implications in the life of a modern person, so much so that people use devices that function off the principles in Maxwell’s equations every day without even knowing it. 2 The basics 2.1 Static charges In order to understand Maxwell’s equations, it is necessary to understand some basic things about electricity and magnetism first. Static electricity is easy to understand, in that it is just a charge which, as its name implies, does not move until it is given the chance to “escape” to the ground. Amounts of charge are measured in coulombs, abbreviated C. 1C is an extraordi- nary amount of charge, chosen rather arbitrarily to be the charge carried by 6.41418 · 1018 electrons. The symbol for charge in equations is q, sometimes with a subscript like q1 or qenc. -
Electro Magnetic Fields Lecture Notes B.Tech
ELECTRO MAGNETIC FIELDS LECTURE NOTES B.TECH (II YEAR – I SEM) (2019-20) Prepared by: M.KUMARA SWAMY., Asst.Prof Department of Electrical & Electronics Engineering MALLA REDDY COLLEGE OF ENGINEERING & TECHNOLOGY (Autonomous Institution – UGC, Govt. of India) Recognized under 2(f) and 12 (B) of UGC ACT 1956 (Affiliated to JNTUH, Hyderabad, Approved by AICTE - Accredited by NBA & NAAC – ‘A’ Grade - ISO 9001:2015 Certified) Maisammaguda, Dhulapally (Post Via. Kompally), Secunderabad – 500100, Telangana State, India ELECTRO MAGNETIC FIELDS Objectives: • To introduce the concepts of electric field, magnetic field. • Applications of electric and magnetic fields in the development of the theory for power transmission lines and electrical machines. UNIT – I Electrostatics: Electrostatic Fields – Coulomb’s Law – Electric Field Intensity (EFI) – EFI due to a line and a surface charge – Work done in moving a point charge in an electrostatic field – Electric Potential – Properties of potential function – Potential gradient – Gauss’s law – Application of Gauss’s Law – Maxwell’s first law, div ( D )=ρv – Laplace’s and Poison’s equations . Electric dipole – Dipole moment – potential and EFI due to an electric dipole. UNIT – II Dielectrics & Capacitance: Behavior of conductors in an electric field – Conductors and Insulators – Electric field inside a dielectric material – polarization – Dielectric – Conductor and Dielectric – Dielectric boundary conditions – Capacitance – Capacitance of parallel plates – spherical co‐axial capacitors. Current density – conduction and Convection current densities – Ohm’s law in point form – Equation of continuity UNIT – III Magneto Statics: Static magnetic fields – Biot‐Savart’s law – Magnetic field intensity (MFI) – MFI due to a straight current carrying filament – MFI due to circular, square and solenoid current Carrying wire – Relation between magnetic flux and magnetic flux density – Maxwell’s second Equation, div(B)=0, Ampere’s Law & Applications: Ampere’s circuital law and its applications viz. -

Electromagnetic Fields and Energy
MIT OpenCourseWare http://ocw.mit.edu Haus, Hermann A., and James R. Melcher. Electromagnetic Fields and Energy. Englewood Cliffs, NJ: Prentice-Hall, 1989. ISBN: 9780132490207. Please use the following citation format: Haus, Hermann A., and James R. Melcher, Electromagnetic Fields and Energy. (Massachusetts Institute of Technology: MIT OpenCourseWare). http://ocw.mit.edu (accessed [Date]). License: Creative Commons Attribution-NonCommercial-Share Alike. Also available from Prentice-Hall: Englewood Cliffs, NJ, 1989. ISBN: 9780132490207. Note: Please use the actual date you accessed this material in your citation. For more information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms 8 MAGNETOQUASISTATIC FIELDS: SUPERPOSITION INTEGRAL AND BOUNDARY VALUE POINTS OF VIEW 8.0 INTRODUCTION MQS Fields: Superposition Integral and Boundary Value Views We now follow the study of electroquasistatics with that of magnetoquasistat ics. In terms of the flow of ideas summarized in Fig. 1.0.1, we have completed the EQS column to the left. Starting from the top of the MQS column on the right, recall from Chap. 3 that the laws of primary interest are Amp`ere’s law (with the displacement current density neglected) and the magnetic flux continuity law (Table 3.6.1). � × H = J (1) � · µoH = 0 (2) These laws have associated with them continuity conditions at interfaces. If the in terface carries a surface current density K, then the continuity condition associated with (1) is (1.4.16) n × (Ha − Hb) = K (3) and the continuity condition associated with (2) is (1.7.6). a b n · (µoH − µoH ) = 0 (4) In the absence of magnetizable materials, these laws determine the magnetic field intensity H given its source, the current density J. -

9 AP-C Electric Potential, Energy and Capacitance
#9 AP-C Electric Potential, Energy and Capacitance AP-C Objectives (from College Board Learning Objectives for AP Physics) 1. Electric potential due to point charges a. Determine the electric potential in the vicinity of one or more point charges. b. Calculate the electrical work done on a charge or use conservation of energy to determine the speed of a charge that moves through a specified potential difference. c. Determine the direction and approximate magnitude of the electric field at various positions given a sketch of equipotentials. d. Calculate the potential difference between two points in a uniform electric field, and state which point is at the higher potential. e. Calculate how much work is required to move a test charge from one location to another in the field of fixed point charges. f. Calculate the electrostatic potential energy of a system of two or more point charges, and calculate how much work is require to establish the charge system. g. Use integration to determine the electric potential difference between two points on a line, given electric field strength as a function of position on that line. h. State the relationship between field and potential, and define and apply the concept of a conservative electric field. 2. Electric potential due to other charge distributions a. Calculate the electric potential on the axis of a uniformly charged disk. b. Derive expressions for electric potential as a function of position for uniformly charged wires, parallel charged plates, coaxial cylinders, and concentric spheres. 3. Conductors a. Understand the nature of electric fields and electric potential in and around conductors. -
13. Maxwell's Equations and EM Waves. Hunt (1991), Chaps 5 & 6 A
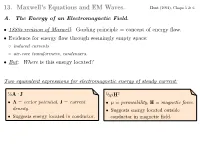
13. Maxwell's Equations and EM Waves. Hunt (1991), Chaps 5 & 6 A. The Energy of an Electromagnetic Field. • 1880s revision of Maxwell: Guiding principle = concept of energy flow. • Evidence for energy flow through seemingly empty space: ! induced currents ! air-core transformers, condensers. • But: Where is this energy located? Two equivalent expressions for electromagnetic energy of steady current: ½A J ½µH2 • A = vector potential, J = current • µ = permeability, H = magnetic force. density. • Suggests energy located outside • Suggests energy located in conductor. conductor in magnetic field. 13. Maxwell's Equations and EM Waves. Hunt (1991), Chaps 5 & 6 A. The Energy of an Electromagnetic Field. • 1880s revision of Maxwell: Guiding principle = concept of energy flow. • Evidence for energy flow through seemingly empty space: ! induced currents ! air-core transformers, condensers. • But: Where is this energy located? Two equivalent expressions for electrostatic energy: ½qψ# ½εE2 • q = charge, ψ = electric potential. • ε = permittivity, E = electric force. • Suggests energy located in charged • Suggests energy located outside object. charged object in electric field. • Maxwell: Treated potentials A, ψ as fundamental quantities. Poynting's account of energy flux • Research project (1884): "How does the energy about an electric current pass from point to point -- that is, by what paths and acording to what law does it travel from the part of the circuit where it is first recognizable as electric and John Poynting magnetic, to the parts where it is changed into heat and other forms?" (1852-1914) • Solution: The energy flux at each point in space is encoded in a vector S given by S = E × H. -

Topic 2.3: Electric and Magnetic Fields
TOPIC 2.3: ELECTRIC AND MAGNETIC FIELDS S4P-2-13 Compare and contrast the inverse square nature of gravitational and electric fields. S4P-2-14 State Coulomb’s Law and solve problems for more than one electric force acting on a charge. Include: one and two dimensions S4P-2-15 Illustrate, using diagrams, how the charge distribution on two oppositely charged parallel plates results in a uniform field. S4P-2-16 Derive an equation for the electric potential energy between two oppositely ∆ charged parallel plates (Ee = qE d). S4P-2-17 Describe electric potential as the electric potential energy per unit charge. S4P-2-18 Identify the unit of electric potential as the volt. S4P-2-19 Define electric potential difference (voltage) and express the electric field between two oppositely charged parallel plates in terms of voltage and the separation ⎛ ∆V ⎞ between the plates ⎜ε = ⎟. ⎝ d ⎠ S4P-2-20 Solve problems for charges moving between or through parallel plates. S4P-2-21 Use hand rules to describe the directional relationships between electric and magnetic fields and moving charges. S4P-2-22 Describe qualitatively various technologies that use electric and magnetic fields. Examples: electromagnetic devices (such as a solenoid, motor, bell, or relay), cathode ray tube, mass spectrometer, antenna Topic 2: Fields • SENIOR 4 PHYSICS GENERAL LEARNING OUTCOME SPECIFIC LEARNING OUTCOME CONNECTION S4P-2-13: Compare and contrast the Students will… inverse square nature of Describe and appreciate the gravitational and electric fields. similarity and diversity of forms, functions, and patterns within the natural and constructed world (GLO E1) SUGGESTIONS FOR INSTRUCTION Entry Level Knowledge Notes to the Teacher The definition of gravitational fields around a point When examining the gravitational field of a mass, mass it is useful to view the mass as a point mass, irrespective of its size. -

Voltage and Electric Potential.Doc 1/6
10/26/2004 Voltage and Electric Potential.doc 1/6 Voltage and Electric Potential An important application of the line integral is the calculation of work. Say there is some vector field F (r )that exerts a force on some object. Q: How much work (W) is done by this vector field if the object moves from point Pa to Pb, along contour C ?? A: We can find out by evaluating the line integral: = ⋅ A Wab ∫F(r ) d C Pb C Pa Say this object is a charged particle with charge Q, and the force is applied by a static electric field E (r ). We know the force on the charged particle is: FE(rr) = Q ( ) Jim Stiles The Univ. of Kansas Dept. of EECS 10/26/2004 Voltage and Electric Potential.doc 2/6 and thus the work done by the electric field in moving a charged particle along some contour C is: Q: Oooh, I don’t like evaluating contour integrals; isn’t there W =⋅F r d A ab ∫ () some easier way? C =⋅Q ∫ E ()r d A C A: Yes there is! Recall that a static electric field is a conservative vector field. Therefore, we can write any electric field as the gradient of a specific scalar field V ()r : E (rr) = −∇V ( ) We can then evaluate the work integral as: =⋅A Wab Qd∫E(r ) C =−QV∫ ∇()r ⋅ dA C =−QV⎣⎡ ()rrba − V()⎦⎤ =−QV⎣⎡ ()rrab V()⎦⎤ Jim Stiles The Univ. of Kansas Dept. of EECS 10/26/2004 Voltage and Electric Potential.doc 3/6 We define: VabVr( a) − Vr( b ) Therefore: Wab= QV ab Q: So what the heck is Vab ? Does it mean any thing? Do we use it in engineering? A: First, consider what Wab is! The value Wab represents the work done by the electric field on charge Q when moving it from point Pa to point Pb. -

At Equilibrium Under Electrostatic Conditions, Any Excess Charge Resides on the Surface of a Conductor
The Electric Field Inside a Conductor: Shielding At equilibrium under electrostatic conditions, any excess charge resides on the surface of a conductor. At equilibrium under electrostatic conditions, the electric field is zero at any point within a conducting material. The conductor shields any charge within it from electric fields created outside the conductor. The Electric Field Inside a Conductor: Shielding The electric field just outside the surface of a conductor is perpendicular to the surface at equilibrium under electrostatic conditions. Chapter 17 Electric Potential Potential Energy The work done by the gravitational field on the ball in going from A to B equals the difference between the gravitational potential energy at A (GPEA) and the gravitational potential energy at B (GPEB) WBA = mghA − mghB = GPE A − GPEB Potential Energy Analogous situation between the work done by the gravitational field on the ball and the work done by the electric field on the charge. Potential Energy The work done by the electric field on the charge in going from A to B equals the difference between the electric potential energy at A (EPEA) and the electric potential energy at B (EPEB) WBA = EPE A − EPEB Note that the electric force is a conservative force just like the gravitational force so the work done by it is independent of the path taken between A and B. The Electric Potential Difference W EPE EPE BA = A − B qo qo qo The potential energy per unit charge is called the electric potential. The Electric Potential Difference DEFINITION OF ELECTRIC -

Steady-State Electric and Magnetic Fields
Steady State Electric and Magnetic Fields 4 Steady-State Electric and Magnetic Fields A knowledge of electric and magnetic field distributions is required to determine the orbits of charged particles in beams. In this chapter, methods are reviewed for the calculation of fields produced by static charge and current distributions on external conductors. Static field calculations appear extensively in accelerator theory. Applications include electric fields in beam extractors and electrostatic accelerators, magnetic fields in bending magnets and spectrometers, and focusing forces of most lenses used for beam transport. Slowly varying fields can be approximated by static field calculations. A criterion for the static approximation is that the time for light to cross a characteristic dimension of the system in question is short compared to the time scale for field variations. This is equivalent to the condition that connected conducting surfaces in the system are at the same potential. Inductive accelerators (such as the betatron) appear to violate this rule, since the accelerating fields (which may rise over many milliseconds) depend on time-varying magnetic flux. The contradiction is removed by noting that the velocity of light may be reduced by a factor of 100 in the inductive media used in these accelerators. Inductive accelerators are treated in Chapters 10 and 11. The study of rapidly varying vacuum electromagnetic fields in geometries appropriate to particle acceleration is deferred to Chapters 14 and 15. The static form of the Maxwell equations in regions without charges or currents is reviewed in Section 4.1. In this case, the electrostatic potential is determined by a second-order differential equation, the Laplace equation. -

On the Helmholtz Theorem and Its Generalization for Multi-Layers
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by DSpace@IZTECH Institutional Repository Electromagnetics ISSN: 0272-6343 (Print) 1532-527X (Online) Journal homepage: http://www.tandfonline.com/loi/uemg20 On the Helmholtz Theorem and Its Generalization for Multi-Layers Alp Kustepeli To cite this article: Alp Kustepeli (2016) On the Helmholtz Theorem and Its Generalization for Multi-Layers, Electromagnetics, 36:3, 135-148, DOI: 10.1080/02726343.2016.1149755 To link to this article: http://dx.doi.org/10.1080/02726343.2016.1149755 Published online: 13 Apr 2016. Submit your article to this journal Article views: 79 View related articles View Crossmark data Full Terms & Conditions of access and use can be found at http://www.tandfonline.com/action/journalInformation?journalCode=uemg20 Download by: [Izmir Yuksek Teknologi Enstitusu] Date: 07 August 2017, At: 07:51 ELECTROMAGNETICS 2016, VOL. 36, NO. 3, 135–148 http://dx.doi.org/10.1080/02726343.2016.1149755 On the Helmholtz Theorem and Its Generalization for Multi-Layers Alp Kustepeli Department of Electrical and Electronics Engineering, Izmir Institute of Technology, Izmir, Turkey ABSTRACT ARTICLE HISTORY The decomposition of a vector field to its curl-free and divergence- Received 31 August 2015 free components in terms of a scalar and a vector potential function, Accepted 18 January 2016 which is also considered as the fundamental theorem of vector KEYWORDS analysis, is known as the Helmholtz theorem or decomposition. In Discontinuities; distribution the literature, it is mentioned that the theorem was previously pre- theory; Helmholtz theorem; sented by Stokes, but it is also mentioned that Stokes did not higher order singularities; introduce any scalar and vector potentials in his expressions, which multi-layers causes a contradiction. -

Lecture 23 Scalar and Vector Potentials
Lecture 23 Scalar and Vector Potentials 23.1 Scalar and Vector Potentials for Time-Harmonic Fields 23.1.1 Introduction Previously, we have studied the use of scalar potential Φ for electrostatic problems. Then we learnt the use of vector potential A for magnetostatic problems. Now, we will study the combined use of scalar and vector potential for solving time-harmonic (electrodynamic) problems. This is important for bridging the gap between static regime where the frequency is zero or low, and dynamic regime where the frequency is not low. For the dynamic regime, it is important to understand the radiation of electromagnetic fields. Electrodynamic regime is important for studying antennas, communications, sensing, wireless power transfer ap- plications, and many more. Hence, it is imperative that we understand how time-varying electromagnetic fields radiate from sources. It is also important to understand when static or circuit (quasi-static) regimes are impor- tant. The circuit regime solves problems that have fueled the microchip industry, and it is hence imperative to understand when electromagnetic problems can be approximated with simple circuit problems and solved using simple laws such as KCL an KVL. 23.1.2 Scalar and Vector Potentials for Statics, A Review Previously, we have studied scalar and vector potentials for electrostatics and magnetostatics where the frequency ! is identically zero. The four Maxwell's equations for a homogeneous 225 226 Electromagnetic Field Theory medium are then r × E = 0 (23.1.1) r × H = J (23.1.2) r · "E = % (23.1.3) r · µH = 0 (23.1.4) Using the knowledge that r × rΦ = 0, we can construct a solution to (23.1.1) easily.