A Problem-Solving Approach – Chapter 5: the Magnetic Field
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Harvard Physics Circle Lecture 14: Magnetism, Biot-Savart, Ampere’S Law
Harvard Physics Circle Lecture 14: Magnetism, Biot-Savart, Ampere’s Law Atınç Çağan Şengül January 30th, 2021 1 Theory 1.1 Magnetic Fields We are dealing with the same problem of how charged particles interact with each other. We have a group of source charges and a test charge that moves under the influence of these source charges. Unlike electrostatics, however, the source charges are in motion. One of the simplest experiments one can do to gain insight on how magnetism works is observing two parallel wires that have currents flowing through them. The force causing this attraction and repulsion is not electrostatic since the wires are neutral. Even if they were not neutral, flipping the wires would not flip the direction of the force as we see in the experiment. Magnetic fields are what is responsible for this phenomenon. A stationary charge produces only and electric field E~ around it, while a moving charge creates a magnetic field B~ . We will first study the force acting on a charge under the influence of an ambient magnetic field, before we delve into how moving charges generate such magnetic fields. 1 1.2 The Lorentz Force Law For a particle with charge q moving with velocity ~v in a magnetic field B~ , the force acting on the particle by the magnetic field is given by, F~ = q(~v × B~ ): (1) This is known as the Lorentz force law. Just like F = ma, this law is based on experiments rather than being derived. Notice that unlike the electrostatic version of this law where the force is parallel to the electric field (F~ = qE~ ), here, the force is perpendicular to both the velocity of the particle and the magnetic field. -

On the History of the Radiation Reaction1 Kirk T
On the History of the Radiation Reaction1 Kirk T. McDonald Joseph Henry Laboratories, Princeton University, Princeton, NJ 08544 (May 6, 2017; updated March 18, 2020) 1 Introduction Apparently, Kepler considered the pointing of comets’ tails away from the Sun as evidence for radiation pressure of light [2].2 Following Newton’s third law (see p. 83 of [3]), one might suppose there to be a reaction of the comet back on the incident light. However, this theme lay largely dormant until Poincar´e (1891) [37, 41] and Planck (1896) [46] discussed the effect of “radiation damping” on an oscillating electric charge that emits electromagnetic radiation. Already in 1892, Lorentz [38] had considered the self force on an extended, accelerated charge e, finding that for low velocity v this force has the approximate form (in Gaussian units, where c is the speed of light in vacuum), independent of the radius of the charge, 3e2 d2v 2e2v¨ F = = . (v c). (1) self 3c3 dt2 3c3 Lorentz made no connection at the time between this force and radiation, which connection rather was first made by Planck [46], who considered that there should be a damping force on an accelerated charge in reaction to its radiation, and by a clever transformation arrived at a “radiation-damping” force identical to eq. (1). Today, Lorentz is often credited with identifying eq. (1) as the “radiation-reaction force”, and the contribution of Planck is seldom acknowledged. This note attempts to review the history of thoughts on the “radiation reaction”, which seems to be in conflict with the brief discussions in many papers and “textbooks”.3 2 What is “Radiation”? The “radiation reaction” would seem to be a reaction to “radiation”, but the concept of “radiation” is remarkably poorly defined in the literature. -

Basic Magnetic Measurement Methods
Basic magnetic measurement methods Magnetic measurements in nanoelectronics 1. Vibrating sample magnetometry and related methods 2. Magnetooptical methods 3. Other methods Introduction Magnetization is a quantity of interest in many measurements involving spintronic materials ● Biot-Savart law (1820) (Jean-Baptiste Biot (1774-1862), Félix Savart (1791-1841)) Magnetic field (the proper name is magnetic flux density [1]*) of a current carrying piece of conductor is given by: μ 0 I dl̂ ×⃗r − − ⃗ 7 1 - vacuum permeability d B= μ 0=4 π10 Hm 4 π ∣⃗r∣3 ● The unit of the magnetic flux density, Tesla (1 T=1 Wb/m2), as a derive unit of Si must be based on some measurement (force, magnetic resonance) *the alternative name is magnetic induction Introduction Magnetization is a quantity of interest in many measurements involving spintronic materials ● Biot-Savart law (1820) (Jean-Baptiste Biot (1774-1862), Félix Savart (1791-1841)) Magnetic field (the proper name is magnetic flux density [1]*) of a current carrying piece of conductor is given by: μ 0 I dl̂ ×⃗r − − ⃗ 7 1 - vacuum permeability d B= μ 0=4 π10 Hm 4 π ∣⃗r∣3 ● The Physikalisch-Technische Bundesanstalt (German national metrology institute) maintains a unit Tesla in form of coils with coil constant k (ratio of the magnetic flux density to the coil current) determined based on NMR measurements graphics from: http://www.ptb.de/cms/fileadmin/internet/fachabteilungen/abteilung_2/2.5_halbleiterphysik_und_magnetismus/2.51/realization.pdf *the alternative name is magnetic induction Introduction It -
Particle Motion
Physics of fusion power Lecture 5: particle motion Gyro motion The Lorentz force leads to a gyration of the particles around the magnetic field We will write the motion as The Lorentz force leads to a gyration of the charged particles Parallel and rapid gyro-motion around the field line Typical values For 10 keV and B = 5T. The Larmor radius of the Deuterium ions is around 4 mm for the electrons around 0.07 mm Note that the alpha particles have an energy of 3.5 MeV and consequently a Larmor radius of 5.4 cm Typical values of the cyclotron frequency are 80 MHz for Hydrogen and 130 GHz for the electrons Often the frequency is much larger than that of the physics processes of interest. One can average over time One can not however neglect the finite Larmor radius since it lead to specific effects (although it is small) Additional Force F Consider now a finite additional force F For the parallel motion this leads to a trivial acceleration Perpendicular motion: The equation above is a linear ordinary differential equation for the velocity. The gyro-motion is the homogeneous solution. The inhomogeneous solution Drift velocity Inhomogeneous solution Solution of the equation Physical picture of the drift The force accelerates the particle leading to a higher velocity The higher velocity however means a larger Larmor radius The circular orbit no longer closes on itself A drift results. Physics picture behind the drift velocity FxB Electric field Using the formula And the force due to the electric field One directly obtains the so-called ExB velocity Note this drift is independent of the charge as well as the mass of the particles Electric field that depends on time If the electric field depends on time, an additional drift appears Polarization drift. -

Electrostatics Vs Magnetostatics Electrostatics Magnetostatics
Electrostatics vs Magnetostatics Electrostatics Magnetostatics Stationary charges ⇒ Constant Electric Field Steady currents ⇒ Constant Magnetic Field Coulomb’s Law Biot-Savart’s Law 1 ̂ ̂ 4 4 (Inverse Square Law) (Inverse Square Law) Electric field is the negative gradient of the Magnetic field is the curl of magnetic vector electric scalar potential. potential. 1 ′ ′ ′ ′ 4 |′| 4 |′| Electric Scalar Potential Magnetic Vector Potential Three Poisson’s equations for solving Poisson’s equation for solving electric scalar magnetic vector potential potential. Discrete 2 Physical Dipole ′′′ Continuous Magnetic Dipole Moment Electric Dipole Moment 1 1 1 3 ∙̂̂ 3 ∙̂̂ 4 4 Electric field cause by an electric dipole Magnetic field cause by a magnetic dipole Torque on an electric dipole Torque on a magnetic dipole ∙ ∙ Electric force on an electric dipole Magnetic force on a magnetic dipole ∙ ∙ Electric Potential Energy Magnetic Potential Energy of an electric dipole of a magnetic dipole Electric Dipole Moment per unit volume Magnetic Dipole Moment per unit volume (Polarisation) (Magnetisation) ∙ Volume Bound Charge Density Volume Bound Current Density ∙ Surface Bound Charge Density Surface Bound Current Density Volume Charge Density Volume Current Density Net , Free , Bound Net , Free , Bound Volume Charge Volume Current Net , Free , Bound Net ,Free , Bound 1 = Electric field = Magnetic field = Electric Displacement = Auxiliary -
Charges and Fields of a Conductor • in Electrostatic Equilibrium, Free Charges Inside a Conductor Do Not Move
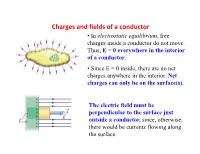
Charges and fields of a conductor • In electrostatic equilibrium, free charges inside a conductor do not move. Thus, E = 0 everywhere in the interior of a conductor. • Since E = 0 inside, there are no net charges anywhere in the interior. Net charges can only be on the surface(s). The electric field must be perpendicular to the surface just outside a conductor, since, otherwise, there would be currents flowing along the surface. Gauss’s Law: Qualitative Statement . Form any closed surface around charges . Count the number of electric field lines coming through the surface, those outward as positive and inward as negative. Then the net number of lines is proportional to the net charges enclosed in the surface. Uniformly charged conductor shell: Inside E = 0 inside • By symmetry, the electric field must only depend on r and is along a radial line everywhere. • Apply Gauss’s law to the blue surface , we get E = 0. •The charge on the inner surface of the conductor must also be zero since E = 0 inside a conductor. Discontinuity in E 5A-12 Gauss' Law: Charge Within a Conductor 5A-12 Gauss' Law: Charge Within a Conductor Electric Potential Energy and Electric Potential • The electrostatic force is a conservative force, which means we can define an electrostatic potential energy. – We can therefore define electric potential or voltage. .Two parallel metal plates containing equal but opposite charges produce a uniform electric field between the plates. .This arrangement is an example of a capacitor, a device to store charge. • A positive test charge placed in the uniform electric field will experience an electrostatic force in the direction of the electric field. -
Electrostatics Voltage Source
012-07038B Instruction Sheet for the PASCO Model ES-9077 ELECTROSTATICS VOLTAGE SOURCE Specifications Ranges: • Fixed 1000, 2000, 3000 VDC ±10%, unregulated (maximum short circuit current less than 0.01 mA). • 30 VDC ±5%, 1mA max. Power: • 110-130 VDC, 60 Hz, ES-9077 • 220/240 VDC, 50 Hz, ES-9077-220 Dimensions: Introduction • 5 1/2” X 5” X 1”, plus AC adapter and red/black The ES-9077 is a high voltage, low current power cable set supply designed exclusively for experiments in electrostatics. It has outputs at 30 volts DC for IMPORTANT: To prevent the risk of capacitor plate experiments, and fixed 1 kV, 2 kV, and electric shock, do not remove the cover 3 kV outputs for Faraday ice pail and conducting on the unit. There are no user sphere experiments. With the exception of the 30 volt serviceable parts inside. Refer servicing output, all of the voltage outputs have a series to qualified service personnel. resistance associated with them which limit the available short-circuit output current to about 8.3 microamps. The 30 volt output is regulated but is Operation capable of delivering only about 1 milliamp before When using the Electrostatics Voltage Source to power falling out of regulation. other electric circuits, (like RC networks), use only the 30V output (Remember that the maximum drain is 1 Equipment Included: mA.). • Voltage Source Use the special high-voltage leads that are supplied with • Red/black, banana plug to spade lug cable the ES-9077 to make connections. Use of other leads • 9 VDC power supply may allow significant leakage from the leads to ground and negatively affect output voltage accuracy. -

The Lorentz Force
CLASSICAL CONCEPT REVIEW 14 The Lorentz Force We can find empirically that a particle with mass m and electric charge q in an elec- tric field E experiences a force FE given by FE = q E LF-1 It is apparent from Equation LF-1 that, if q is a positive charge (e.g., a proton), FE is parallel to, that is, in the direction of E and if q is a negative charge (e.g., an electron), FE is antiparallel to, that is, opposite to the direction of E (see Figure LF-1). A posi- tive charge moving parallel to E or a negative charge moving antiparallel to E is, in the absence of other forces of significance, accelerated according to Newton’s second law: q F q E m a a E LF-2 E = = 1 = m Equation LF-2 is, of course, not relativistically correct. The relativistically correct force is given by d g mu u2 -3 2 du u2 -3 2 FE = q E = = m 1 - = m 1 - a LF-3 dt c2 > dt c2 > 1 2 a b a b 3 Classically, for example, suppose a proton initially moving at v0 = 10 m s enters a region of uniform electric field of magnitude E = 500 V m antiparallel to the direction of E (see Figure LF-2a). How far does it travel before coming (instanta> - neously) to rest? From Equation LF-2 the acceleration slowing the proton> is q 1.60 * 10-19 C 500 V m a = - E = - = -4.79 * 1010 m s2 m 1.67 * 10-27 kg 1 2 1 > 2 E > The distance Dx traveled by the proton until it comes to rest with vf 0 is given by FE • –q +q • FE 2 2 3 2 vf - v0 0 - 10 m s Dx = = 2a 2 4.79 1010 m s2 - 1* > 2 1 > 2 Dx 1.04 10-5 m 1.04 10-3 cm Ϸ 0.01 mm = * = * LF-1 A positively charged particle in an electric field experiences a If the same proton is injected into the field perpendicular to E (or at some angle force in the direction of the field. -

Quantum Mechanics Electromotive Force
Quantum Mechanics_Electromotive force . Electromotive force, also called emf[1] (denoted and measured in volts), is the voltage developed by any source of electrical energy such as a batteryor dynamo.[2] The word "force" in this case is not used to mean mechanical force, measured in newtons, but a potential, or energy per unit of charge, measured involts. In electromagnetic induction, emf can be defined around a closed loop as the electromagnetic workthat would be transferred to a unit of charge if it travels once around that loop.[3] (While the charge travels around the loop, it can simultaneously lose the energy via resistance into thermal energy.) For a time-varying magnetic flux impinging a loop, theElectric potential scalar field is not defined due to circulating electric vector field, but nevertheless an emf does work that can be measured as a virtual electric potential around that loop.[4] In a two-terminal device (such as an electrochemical cell or electromagnetic generator), the emf can be measured as the open-circuit potential difference across the two terminals. The potential difference thus created drives current flow if an external circuit is attached to the source of emf. When current flows, however, the potential difference across the terminals is no longer equal to the emf, but will be smaller because of the voltage drop within the device due to its internal resistance. Devices that can provide emf includeelectrochemical cells, thermoelectric devices, solar cells and photodiodes, electrical generators,transformers, and even Van de Graaff generators.[4][5] In nature, emf is generated whenever magnetic field fluctuations occur through a surface. -

19-8 Magnetic Field from Loops and Coils
Answer to Essential Question 19.7: To get a net magnetic field of zero, the two fields must point in opposite directions. This happens only along the straight line that passes through the wires, in between the wires. The current in wire 1 is three times larger than that in wire 2, so the point where the net magnetic field is zero is three times farther from wire 1 than from wire 2. This point is 30 cm to the right of wire 1 and 10 cm to the left of wire 2. 19-8 Magnetic Field from Loops and Coils The Magnetic Field from a Current Loop Let’s take a straight current-carrying wire and bend it into a complete circle. As shown in Figure 19.27, the field lines pass through the loop in one direction and wrap around outside the loop so the lines are continuous. The field is strongest near the wire. For a loop of radius R and current I, the magnetic field in the exact center of the loop has a magnitude of . (Equation 19.11: The magnetic field at the center of a current loop) The direction of the loop’s magnetic field can be found by the same right-hand rule we used for the long straight wire. Point the thumb of your right hand in the direction of the current flow along a particular segment of the loop. When you curl your fingers, they curl the way the magnetic field lines curl near that segment. The roles of the fingers and thumb can be reversed: if you curl the fingers on Figure 19.27: (a) A side view of the magnetic field your right hand in the way the current goes around from a current loop. -

Maxwell's Equations
Maxwell’s Equations Matt Hansen May 20, 2004 1 Contents 1 Introduction 3 2 The basics 3 2.1 Static charges . 3 2.2 Moving charges . 4 2.3 Magnetism . 4 2.4 Vector operations . 5 2.5 Calculus . 6 2.6 Flux . 6 3 History 7 4 Maxwell’s Equations 8 4.1 Maxwell’s Equations . 8 4.2 Gauss’ law for electricity . 8 4.3 Gauss’ law for magnetism . 10 4.4 Faraday’s law . 11 4.5 Ampere-Maxwell law . 13 5 Conclusion 14 2 1 Introduction If asked, most people outside a physics department would not be able to identify Maxwell’s equations, nor would they be able to state that they dealt with electricity and magnetism. However, Maxwell’s equations have many very important implications in the life of a modern person, so much so that people use devices that function off the principles in Maxwell’s equations every day without even knowing it. 2 The basics 2.1 Static charges In order to understand Maxwell’s equations, it is necessary to understand some basic things about electricity and magnetism first. Static electricity is easy to understand, in that it is just a charge which, as its name implies, does not move until it is given the chance to “escape” to the ground. Amounts of charge are measured in coulombs, abbreviated C. 1C is an extraordi- nary amount of charge, chosen rather arbitrarily to be the charge carried by 6.41418 · 1018 electrons. The symbol for charge in equations is q, sometimes with a subscript like q1 or qenc. -
Electro Magnetic Fields Lecture Notes B.Tech
ELECTRO MAGNETIC FIELDS LECTURE NOTES B.TECH (II YEAR – I SEM) (2019-20) Prepared by: M.KUMARA SWAMY., Asst.Prof Department of Electrical & Electronics Engineering MALLA REDDY COLLEGE OF ENGINEERING & TECHNOLOGY (Autonomous Institution – UGC, Govt. of India) Recognized under 2(f) and 12 (B) of UGC ACT 1956 (Affiliated to JNTUH, Hyderabad, Approved by AICTE - Accredited by NBA & NAAC – ‘A’ Grade - ISO 9001:2015 Certified) Maisammaguda, Dhulapally (Post Via. Kompally), Secunderabad – 500100, Telangana State, India ELECTRO MAGNETIC FIELDS Objectives: • To introduce the concepts of electric field, magnetic field. • Applications of electric and magnetic fields in the development of the theory for power transmission lines and electrical machines. UNIT – I Electrostatics: Electrostatic Fields – Coulomb’s Law – Electric Field Intensity (EFI) – EFI due to a line and a surface charge – Work done in moving a point charge in an electrostatic field – Electric Potential – Properties of potential function – Potential gradient – Gauss’s law – Application of Gauss’s Law – Maxwell’s first law, div ( D )=ρv – Laplace’s and Poison’s equations . Electric dipole – Dipole moment – potential and EFI due to an electric dipole. UNIT – II Dielectrics & Capacitance: Behavior of conductors in an electric field – Conductors and Insulators – Electric field inside a dielectric material – polarization – Dielectric – Conductor and Dielectric – Dielectric boundary conditions – Capacitance – Capacitance of parallel plates – spherical co‐axial capacitors. Current density – conduction and Convection current densities – Ohm’s law in point form – Equation of continuity UNIT – III Magneto Statics: Static magnetic fields – Biot‐Savart’s law – Magnetic field intensity (MFI) – MFI due to a straight current carrying filament – MFI due to circular, square and solenoid current Carrying wire – Relation between magnetic flux and magnetic flux density – Maxwell’s second Equation, div(B)=0, Ampere’s Law & Applications: Ampere’s circuital law and its applications viz.