A Fully Programmable 40 GOPS SDR Single Chip Baseband for LTE/Wimax Terminals
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Paradigm Shift: the Winners Are
PARADIGM SHIFT: THE WINNERS ARE Dr. Jeremy Wang Asia Pacific Executive Director, GSA July 30, 2008 GSA Mission Accelerate the growth and increase the return on invested capital of the global semiconductor industry by fostering a more effective fabless ecosystem through collaboration, integration and innovation. GSA Board of Directors Dwight Decker Sanjay Jha Jodi Shelton Danny Biran Rick Cassidy Guillame Aart de Geus Conexant Qualcomm Altera TSMC North d’Eyssautier Synopsys, America picoChip Inc. Jack Harding Colin Harris Kenneth Joyce Fu Tai Liou Steven Longoria Dr. Nicky Lu Chris eSilicon Corp PMC-Sierra, Amkor UMC IBM Etron Malachowsky Inc. Technology, Inc. NVIDIA Vahid Manian Michael Rekuc Walden Rhines Naveed Vincent Tong Dr. Albert Wu Dr. Tien Wu Broadcom Chartered Mentor Graphics Sherwani Xilinx Marvell ASE, Inc. Corporation Open-Silicon Asia-Pacific Leadership Council Chairman Dr. Chintay Shih Xiaolang Yan Ming Kai Tsai H.P. Lin Qin-Sheng Wang K.C. Shih Dr. Nicky Lu Special Advisor College of MediaTek Faraday IC China Semiconductor Global Unichip Etron Information Industry Association Science and Engineering Zhejiang University Special Advisor Gordon Gau Chou-Chye Wen-Chi Chen Dr. Woodward Dr. Zhonghan Dr. Shaojun Wei Holtek Huang VIA Yang (John) Deng Phoenix Sunplus Silicon7 Vimicro Microelectronics Jordan Wu Dr. Ki Soo Lun Zhao Dr. Ping Wu Himax Hwang Datang Spreadtrum Technologies Core Logic, Inc. Microelectronics Communications Inc. EMEA Leadership Council David Milne Jalal Bagherli David Baillie Kobi Ben-Zvi Stan Boland Wolfson Dialog CamSemi Wintegra Icera Microelectronics Semiconductor Warren East Guillame d’Eyssautier Danny Hachoen Gennady Krasnikov Chris Ladas ARM, Inc. picoChip DSP Group Mikron JSC CSR Key Topics •Analog/Mixed Signal •Wireless •Automotive Eric Mayer John Schmitz Infineon NXP Semiconductor VC Advisory Council Wayne Cantwell Steve Domenik Phillip T. -

CHIPS for EVERYTHING: Britain’S Opportunities in a Key Global Market FRONT COVER (See Paragraphs 4.5 and 4.6)
HOUSE OF LORDS Select Committee on Science and Technology CHIPS FOR EVERYTHING: Britain’s opportunities in a key global market FRONT COVER (see paragraphs 4.5 and 4.6) 1 The first illustration shows a technician holding a 300 mm wafer of silicon on which several hundred chips will be fabricated. 2 The second is a Cirrus Logic chip incorporating an ARM920T core, enlarged from its actual size of about a centimetre square. Over 600 such chips — each containing tens of millions of transistors — could be fabricated on one 300 mm wafer. 3 The third is an electron micrograph showing the layered structure of a chip built up in the 20 or so stages of the fabrication process. Most obvious are three layers of metal interconnect, but field-effect transistors are visible at the lowest levels towards the bottom left corner. The image is highly magnified. 2002 technology allows the strips of metal interconnect to be no more than 200 nanometres wide, about one five-hundredth of the thickness of the paper on which this Report is printed. At the same magnification, the image of the whole 300 mm wafer would be nearly 4 kilometres across and that of the Cirrus/ARM920T chip would be about 125 metres across. 1 International SEMATECH: Austin, TX, 2001. © Semiconductor Industry Association, reproduced by permission. 2 © ARM Ltd UK and Cirrus Logic Inc USA, reproduced by permission. 3 Image (rights reserved) by courtesy of the Semiconductor Equipment Assessment, an EU-funded project, as published by European Semiconductor magazine. REAR COVER (see paragraph 4.15) A typical table from the International Technology Roadmap for Semiconductors (ITRS), 2001 edition. -
Inter Design Technology Review
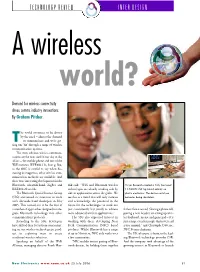
T E C H N O L O G Y R E V I E W I N T E R D E S I G N A wireless world? Demand for wireless connectivity drives comms industry innovations. By Graham Pitcher. he world continues to be driven by the need ± almost the demand T ± to communicate and we're get- ting our `fix' through a range of wireless communication options. The more obvious wireless communi- cations are the ones used in our day to day affairs ± the mobile phone and one of the WiFi variants; IEEE802.11a, b or g. But, as the BBC is careful to say when dis- cussing its magazines, other wireless com- munication methods are available. And there were interesting developments in the Bluetooth, ultrawideband, ZigBee and zlik said: ªWiFi and Bluetooth wireless Philips Research created a ©fully functional© IEEE802.20 worlds. technologies are already working side by 13.56MHz rfid tag based entirely on The Bluetooth Special Interest Group side in applications across the globe. We plastic electronics. The device could see (SIG) announced its intention to work see this as a trend that will only increase barcodes being obsoleted. with ultrawide band developers in May and acknowledge the potential in the 2005. That turned out to be the first of future for the technologies to work not a number of approaches designed to inte- just concurrently but jointly to achieve for less than a second. Sharing a phone call, grate Bluetooth technology into other more advanced wireless applications.º pairing a new headset, or setting up wire- communications protocols. -

Universidade Federal Do Rio De Janeiro Instituto De Química Programa De Pós-Graduação Em Ciência De Alimentos
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO INSTITUTO DE QUÍMICA PROGRAMA DE PÓS-GRADUAÇÃO EM CIÊNCIA DE ALIMENTOS Compostos bioativos recuperados de farelo de soja (Glycine max) por extração aquosa: compostos fenólicos e peptídeos antimicrobianos e antitumorais Cyntia da Silva de Freitas Rio de Janeiro 2018 Cyntia da Silva de Freitas Compostos bioativos recuperados de farelo de soja (Glycine max) por extração aquosa: compostos fenólicos e peptídeos antimicrobianos e antitumorais Tese de Doutorado apresentada ao Programa de Pós-graduação em Ciência de Alimentos, Instituto de Química, Universidade Federal do Rio de Janeiro, como requisito parcial à obtenção do título de Doutor em Ciência de Alimentos. Orientadores: Profa .Dra . Vânia Margaret Flosi Paschoalin Prof. Dr. Eduardo Mere Del Aguila Dra. Patricia Ribeiro Pereira Rio de Janeiro 2018 Freitas, Cyntia da Silva de. Compostos bioativos recuperados de farelo de soja (Glycine max) por extração aquosa: compostos fenólicos e peptídeos antimicrobianos e antitumorais. / Cyntia da Silva de Freitas. – Rio de Janeiro: UFRJ, 2014. p., il. Tese (Doutorado em Ciência de Alimentos) – Universidade Federal do Rio de Janeiro, Instituto de Química, 2018. Orientadores: Eduardo Mere Del Aguila, Vânia Margaret Flosi Paschoalin e Patricia Ribeiro Pereira. 1. Glycine max. 2. Farelo da soja. 3. Peptídeos antimicrobianos. I. Del Aguila, Eduardo Mere. II. Paschoalin, Vânia Margaret Flosi. III. Pereira, Patricia Ribeiro. III. Universidade Federal do Rio de Janeiro. Programa de Pós Graduação em Ciência de Alimentos. IV. Título. Cyntia da Silva de Freitas COMPOSTOS BIOATIVOS RECUPERADOS DE FARELO DE SOJA (GLYCINE MAX) POR EXTRAÇÃO AQUOSA: COMPOSTOS FENÓLICOS E PEPTÍDEOS ANTIMICROBIANS E ANTITUMORAIS Profa. Dra. Vânia Margaret Flosi Paschoalin Prof. -

Microwave Engineering Europe
european November/December 2011 business press engineeringengineering europeeurope Radar MEMS/Nanotechnology Low Power RF www.microwave-eetimes.com The European journal for the microwave and wireless design engineer 2 NEWS Performance vs. price? At last, resistive parts that make a priority of both. World needs over 10 million small cells by 2015 Chicago will need approximately demand for data is often high- 84,500 small cells to deliver est. Other sites include airports, truly high-speed LTE by 2015, stations, office buildings and with acceptable coverage and outdoor sites providing wider speeds, according to analysis coverage in busy street areas. from Picochip. To provide LTE The report was put together Got a resistive component priority checklist by Picochip’s CTO Dr Pulley, who of your own? Include Anaren on your RFQ everywhere in the US around list, and we’ll show you how we measure up! 1.8 million small cells would be also concluded that worldwide required, based on estimations there would need to be in excess Designed specifi cally for on data growth and usage across of ten million small cells to deliver commercial wireless the country. This is in addition to comparable performance. bands – and priced more residential femtocells and Wi-Fi. The US is already seeing wide- competitively than ever The analysis models what will spread deployment of LTE, with before – Anaren’s new be required to deliver the adver- basestations being deployed now wireless resistive compo- tised data rates consistently to to deliver next generation ser- nents are the answer when users wherever they are. -

The Femtocell Grows up and Leaves Home by Nigel Toon, CEO, Picochip
Technology for coping with Video The femtocell grows up and leaves home by Nigel Toon, CEO, Picochip Due to limited spectrum availability and the air interfaces nearing maximum efficiency, small cells are one of the few options remaining to increase capacity. With femtocells chips getting more powerful and their cost greatly reduced in volume rollout, the residential femtocell becomes a viable proposition. Femtocells plug holes in coverage, which is the top-most cause of subscribers’ churn. Now the ‘metro’ (that is, beyond residential) femtocell concept is also beginning to take hold and to shake up the conventional network. For Enterprise market, the integration of the femtocell with PBX brings many useful mobile-integration services. For all these reasons, this article declares that this is the year that femtocells come of age. Nigel Toon is the Chief Executive Officer and President of Picochip. Nigel Toon joined PicoChip from Icera, which he co-founded in 2002, where he was responsible for sales and marketing and was a member of the Board of Directors. He played a key role in growing Icera into a global leader in wireless technology. Prior to founding Icera, Mr Toon served at Altera Corporation (NASDAQ: ALTR), latterly as Vice President and Managing Director for the company’s European business unit; a post he assumed in 1998, having previously held the roles of Regional Sales Manager and Field Applications Engineer. Mr Toon’s early career included business development and engineering roles with Standard Microsystems, Memec PLC and GEC. Nigel Toon studied Electrical and Electronic Engineering at Heriot Watt University and is a Member of the IEEE. -
20061014.Pdf
SEARCH RESEARCH TOOLS Economist.com Choose a research tool... advanced search » Subscribe Activate Help Thursday October 12th 2006 Welcome = requires subscription My Account » Manage my newsletters LOG OUT » » PRINT EDITION Print Edition October 14th 2006 On the cover Previous print editions Subscribe America, China and Russia Oct 7th 2006 Subscribe to the print edition must all make sacrifices to Sep 30th 2006 Or buy a Web subscription for stop a nuclear arms race in Sep 23rd 2006 full access online Asia and the Middle East: Sep 16th 2006 leader Sep 9th 2006 RSS feeds Receive this page by RSS feed More print editions and covers » The world this week Politics this week Full contents Enlarge current cover Business this week Past issues/regional covers Subscribe A survey of telecoms convergence Leaders GLOBAL AGENDA Your television is ringing North Korea POLITICS THIS WEEK Who can stop him now? All things to all men BUSINESS THIS WEEK Somalia The end of the line Seeking moderates, fearing war OPINION Home and away Leaders Telecoms Letters Here we go again, sort of Tuning in to the future? Ex-communist countries WORLD Changing the rules Europe's fraying fringe United States The Americas American politics Winners and losers Asia Crash and re-boot Middle East & Africa Sources and acknowledgements Europe Britain Offer to readers Country Briefings Letters Cities Guide On the yen, Egypt, Austin, Sakhalin Island, Iraq, Business SURVEYS maglev trains, India and China, squash, Canada's native minorities, Ann Richards BUSINESS Google and YouTube -
Using TV White Space for Interference Mitigation in LTE Femtocell Networks
Proceedings of ICCTA2011 Using TV White Space for Interference Mitigation in LTE Femtocell Networks Fei Peng, Yue Gao, Yue Chen, K K Chai, Laurie Cuthbert Queen Mary University of London School of Electronic Engineering and Computer Science London, United Kingdom [email protected] Abstract technology to get access to certain licensed bands, like TVWS is being promoted by international The traditional Femtocell shares the same licensed organisations, such as Federal Communications frequency band with Macrocell, thus introducing Commission (FCC) in US, and recently by Ofcom cross-tier interference. Interference mitigation in UK. between the Femtocell and Macrocell is considered to be one of the major challenges in Femtocells Among many potential applications for the TVWS, Network. In this paper, the released TV spectrum one promising application network scenarios is by the digital switchover named TV White Space Long Term Evolution (LTE) Femtocell Network, in (TVWS) is proposed to reduce the interference for which it is referred as the HeNB [4]. It is a home the LTE Femtocell Network. Based on the base station with short range, low cost, and being combination of cognitive sensing and TVWS, a linked with the cellular network via a broadband novel resource allocation scheme is applied to connection; it could offload the traffic in cellular mitigate the interference that Macro users are network. Therefore Femtocell is an effective suffering from nearby Femtocells. A single cell approach to improve the indoor coverage and cell Long Term Evolution (LTE) Femtocell simulator is capacity. The main challenge in Femtocell established to demonstrate the system performance. -
The Vodafone Access Gateway / UMTS Femto Cell / Vodafone Sure Signal
vodafone - THC Wiki http://wiki.thc.org/vodafone vodafone Nice article about our project: Read more... Kudos goes to the french underground! Keep Hacking! The Vodafone Access Gateway / UMTS Femto cell / Vodafone Sure Signal 2009-AUG-28 Started private femto wiki. 2010-JUL-14 Project stopped. To much fun with other things. 2011-JUN-08 De-classified private wiki and copied content into this wiki. Enjoy. 2011-JUL-13 Publicly announced 1 of 19 7/13/11 4:57 PM vodafone - THC Wiki http://wiki.thc.org/vodafone Contents 1. Where to buy 2. Infos via Network 3. Open Source 4. Hardware 1. Pictures 2. Spansion NOR Flash 3. Hynix 256MByte NAND Flash 4. Sagem HILo GSM Module 5. Network Connection (AC) 1. Where does the encryption happen 2. IPSEC up 6. Femto Mod 1. Hardware 1. Go invisible - Removing the Vodafone Tracking Backdoor 2. Breaking into the Femto 1. Serial Console 2. SSH 3. Increase output power 4. External Antenna and Amplifier 2. Software 1. Preventing unwanted updates 2. Disabling Alarms 3. Making the Root FS (/) writeable 4. Autostart on femto bootup 5. Factory Reset 7. Projects 1. Intercepting Traffic 1. Technical Details 2. Call Fraud 3. Tunnelling 1. Linux Setup 1. Femto Network 2. OpenVPN Config 3. Routing 1. Laptop End 2. Server End 2. Notes 8. Toys 2 of 19 7/13/11 4:57 PM vodafone - THC Wiki http://wiki.thc.org/vodafone 1. Sniffing Traffic with Wireshark 1. ISAKMP 2. IMSI Catcher 1. Adding your own SIM card 3. sbsp interface 9. Links Vodafone released its femto cell to the general public. -

Picochip Unveils TD-SCDMA Femtocell
NEWS FEBRUARY2008 Search our archive at: www.telecoms.com January’s ten most viewed picoChip unveils articles on TD-SCDMA femtocell Yahoo makes mobile move UK-based chip shop, picoChip, has the third 3G standard, is to launch in the Nokia slashes 2,300 jobs, closes unveiled a femtocell reference design Olympic cities this summer. German factory supporting China’s homegrown TD- Stuart Carlaw, research director for SCDMA standard. ABI Research, said, “Femtocells help Hackers get Google’s Android to run The PC8808 TD-SCDMA femtocell carriers solve problems of both coverage on hardware reference design supports HSDPA and and capacity which are applicable to all Intel looks to ultra mobile future can integrate both Node B and protocol standards, including TD-SCDMA. Given stack, integrating back into the core how good coverage already is in China for Sprint to launch WiMAX end-April network using a number of different mobile services, consumers will expect architectures including SIP, UMA or Iu, excellent indoor services too: something Jobs catches Air at Macworld; updates iPhone the company said. that is particularly important for data, iRiver preparing to intro media phone Yang Hua, secretary general of which is already in high use in the region. TD-SCDMA Industry Alliance, said, “For both these reasons, I’d expect Sony wheels out own wireless transfer tech “Femtocells are an important part of the TD-SCDMA femtocells to be later in Android debuts on HTC device TD-SCDMA ecosystem, and an essential deployment, but to ramp as fast if not part of operator strategy, particularly as faster than those for WCDMA. -
Mobile Citizens, Mobile Consumers Adapting Regulation for a Mobile, Wireless World
Mobile citizens, mobile consumers Adapting regulation for a mobile, wireless world Consultation Publication date: 28 August 2008 Closing Date for Responses: 6 November 2008 Mobile citizens, mobile consumers Contents Section Page 1 Executive summary 1 2 Why is Ofcom undertaking this Assessment? 7 3 Today’s UK mobile markets 10 4 Consumers 51 5 Citizens 72 6 Regulation 86 7 Scenarios 99 8 Implications 111 Annex Page 1 Responding to this consultation 137 2 Ofcom’s consultation principles 139 3 Consultation response cover sheet 140 4 Consultation questions 142 5 Mobile pre-pay user profiles 145 6 Mobile related complaints 147 7 Related Ofcom projects and initiatives 151 8 Glossary 157 9 Report by Analysys Mason 163 Mobile citizens, mobile consumers Section 1 1 Executive summary 1.1 In fulfilling its duties as the regulator of converging communications industries, Ofcom periodically takes stock of the strategic role of regulation in the particular sectors we regulate. We believe that now is the right time to carry out an assessment of the UK mobile sector.1 The purpose of this Assessment is to identify whether and how regulation needs to adapt to a changing market. 1.2 Our principal statutory duties are “(a) to further the interests of citizens in relation to communications matters; and (b) to further the interests of consumers in relevant markets, where appropriate by promoting competition".2 These two obligations, as well as our duty to encourage innovation, are at the heart of this Assessment. 1.3 Our goal is for the mobile sector is to ensure that the sector contributes fully to the UK economy and society at large. -

Moving Forward with Strategy for Innovation and Success
Global Semiconductor Alliance DRIVING PACKAGING INNOVATION SEMICONDUCTOR COST REDUCTION STRATEGIES MACRO-ECONOMIC TRENDS IN THE FABLESS INDUSTRY SEMICONDUCTOR INNOVATION IN AN INVESTMENT-CONSTRAINED ECONOMY INNOVATION THROUGH COLLABORATION: GUIDING PRINCIPLE FOR THE 21ST CENTURY Moving Forward with Strategy for Innovation and Success Vol.16 No.4 Dec. 2009 Published by GSA $60 (U.S.) 1 A Powerful Platform for Amazing Performance Performance. To get it right, you need a foundry with an Open Innovation Platform™ and process technologies that provides the flexibility to expertly choreograph your success. To get it right, you need TSMC. Whether your designs are built on mainstream or highly advanced processes, TSMC ensures your products achieve maximum value and performance. Product Differentiation. Increased functionality and better system performance drive product value. So you need a foundry partner who keeps your products at their innovative best. TSMC’s robust platform provides the options you need to increase functionality, maximize system performance and ultimately differentiate your products. Faster Time-to-Market. Early market entry means more product revenue. TSMC’s DFM-driven design initiatives, libraries and IP programs, together with leading EDA suppliers and manufacturing data-driven PDKs, shorten your yield ramp. That gets you to market in a fraction of the time it takes your competition. Investment Optimization. Every design is an investment. Function integration and die size reduction help drive your margins. It’s simple, but not easy. We continuously improve our process technologies so you get your designs produced right the first time. Because that’s what it takes to choreograph a technical and business success.