Table of Contents Table of Contents
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Engine Components and Filters: Damage Profiles, Probable Causes and Prevention
ENGINE COMPONENTS AND FILTERS: DAMAGE PROFILES, PROBABLE CAUSES AND PREVENTION Technical Information AFTERMARKET Contents 1 Introduction 5 2 General topics 6 2.1 Engine wear caused by contamination 6 2.2 Fuel flooding 8 2.3 Hydraulic lock 10 2.4 Increased oil consumption 12 3 Top of the piston and piston ring belt 14 3.1 Hole burned through the top of the piston in gasoline and diesel engines 14 3.2 Melting at the top of the piston and the top land of a gasoline engine 16 3.3 Melting at the top of the piston and the top land of a diesel engine 18 3.4 Broken piston ring lands 20 3.5 Valve impacts at the top of the piston and piston hammering at the cylinder head 22 3.6 Cracks in the top of the piston 24 4 Piston skirt 26 4.1 Piston seizure on the thrust and opposite side (piston skirt area only) 26 4.2 Piston seizure on one side of the piston skirt 27 4.3 Diagonal piston seizure next to the pin bore 28 4.4 Asymmetrical wear pattern on the piston skirt 30 4.5 Piston seizure in the lower piston skirt area only 31 4.6 Heavy wear at the piston skirt with a rough, matte surface 32 4.7 Wear marks on one side of the piston skirt 33 5 Support – piston pin bushing 34 5.1 Seizure in the pin bore 34 5.2 Cratered piston wall in the pin boss area 35 6 Piston rings 36 6.1 Piston rings with burn marks and seizure marks on the 36 piston skirt 6.2 Damage to the ring belt due to fractured piston rings 37 6.3 Heavy wear of the piston ring grooves and piston rings 38 6.4 Heavy radial wear of the piston rings 39 7 Cylinder liners 40 7.1 Pitting on the outer -
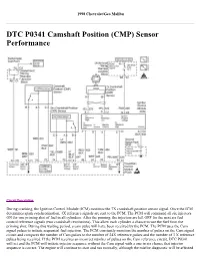
DTC P0341 Camshaft Position (CMP) Sensor Performance
1998 Chevrolet/Geo Malibu DTC P0341 Camshaft Position (CMP) Sensor Performance Circuit Description During cranking, the Ignition Control Module (ICM) monitors the 7X crankshaft position sensor signal. Once the ICM determines spark synchronization, 3X reference signals are sent to the PCM. The PCM will command all six injectors ON for one priming shot of fuel in all cylinders. After the priming, the injectors are left OFF for the next six fuel control reference signals (two crankshaft revolutions). This allow each cylinder a chance to use the fuel from the priming shot. During this waiting period, a cam pulse will have been received by the PCM. The PCM uses the Cam signal pulses to initiate sequential fuel injection. The PCM constantly monitors the number of pulses on the Cam signal circuit and compares the number of Cam pulses to the number of 24X reference pulses and the number of 3 X reference pulses being received. If the PCM receives an incorrect number of pulses on the Cam reference circuit, DTC P0341 will set and the PCM will initiate injector sequence without the Cam signal with a one in six chance that injector sequence is correct. The engine will continue to start and run normally, although the misfire diagnostic will be affected if a misfiring condition occurs. Conditions for Setting the DTC z The engine is running (3X reference pulses are being received). z CMP sensor reference pulse is not detected every engine cycle. Action Taken When the DTC Sets z The PCM will illuminate the malfunction indicator lamp (MIL) during the second consecuitive trip in which the diagnostic has been run and failed. -

Oldsmobile Note: These Cams Use .000" Intake and Exhaust Valve Lash
HYDRAULIC CAMSHAFTS Non Roller 1967-up 260 307 (5.0L) 350 (5.7L) 400 403 425 455 (39° bank angle) Oldsmobile Note: These cams use .000" intake and exhaust valve lash. X-TREME MILEAGE CAMS AVAILABLE! CONTACT CROWER TECHNICIANS FOR MORE INFO. Grind Advertised Duration Gross Lift Description C.I.D. Part Lobe Duration @ .050" 1.6 / 1.6 Rec Group Number Center Intake Exhaust Intake Exhaust Intake Exhaust Kit BAJA BEAST / PERFORMANCE LEVEL 2 - Low to mid-range torque 260 280H for daily drivability. Economical price. 56915 280° 289° 204° 214° .450" .474" 84057 350 112° RPM Power Range: 1500 to 4250 / Redline: 5500 plus. POWER BEAST / PERFORMANCE LEVEL 3 - Delivers impressive mid- 350 289H range and top end power. Healthy sound. Economical price. 56903 289° 300° 214° 224° .474" .498" 84057 425 112° RPM Power Range: 1750 to 4500 / Redline: 5750 plus. ULTRA BEAST / PERFORMANCE LEVEL 4 - Upper mid-range to top 455 304H end power. Emphasis on top end. 56919 304° 316° 234° 244° .520" .542" 84057 cid 112° RPM Power Range: 2000 to 4800 / Redline: 6200 plus. MILEAGE COMPU-PRO / Performance Level 1 - These cams are 400 250HDP designed to enhance throttle response and low-end torque in vans, 56258 250° 258° 192° 196° .429" .445" 84057 403 112° trucks and passenger cars while delivering fuel efficient motoring. High vacuum and smooth idle are characteristic of these profiles. Stock or small cfm carburetor, small diameter tube headers, dual 425 260HDP exhaust, and ignition rework are recommended for maximum 56260 260° 266° 203° 211° .448" .450" 84057 cid 112° benefit. -

Technology Overview
VQ35HR•VQ25HR Engine Technology Overview V6 GASOLINE ENGINE Advanced technology takes the next generation of Nissan’s world-renowned VQ engine to new pinnacles of high-rev performance and environmental friendliness. Nissan’s latest six-cylinder V-type Major technologies engine inherits the high-performance DNA that has made Nissan’s VQ Taking the award-winning VQ series another step series famous. Taking the acclaimed toward the ultimate powertrain, Nissan’s next- VQ engine’s “smooth transition” generation VQ35HR & VQ25HR are thoroughly concept to higher revolutions than reengineered to boost the rev limit and deliver greater ever, this VQ is a powerful and agile power, while achieving exceptional fuel economy and new powerplant for Nissan’s front- clean emissions. engine, rear-wheel-drive vehicles. Higher revolution limit By greatly reducing friction, Nissan engineers achieved a smooth transition to the high-rev limit, New VQ Engine which has been boosted to a 7,500rpm redline. Advantages Lengthened connecting rods Smooth transition up to high-rev redline Lengthening the connecting rods by 7.6mm reduces Lengthened connecting rods, addition of a ladder piston sideforce on the cylinder walls. This reduces frame and other improvements greatly reduce friction for smoother piston action to support high- friction. The result is effortless throttle response rev performance. all the way to the 7500-rpm redline. New ladder frame Top level power performance in class The lower cylinder block that supports the crankshaft Improved intake and exhaust systems, raised uses a ladder-frame structure for increased stiffness. combustion efficiency, and other enhancements This suppresses vibration to minimize friction at high achieve class-leading power. -

Facts Guide 9/18/17, 2�54 PM
Facts Guide 9/18/17, 254 PM 2016 HR-V Facts Guide INTRODUCTION The Honda Brand At Honda, dreams have been instrumental to our success from the very beginning. Today, those dreams are reflected in our automobiles. In the 21st century, the power of Honda’s dreams will continue to lead to new insights and new technology. Examples of turning dreams into reality include the 2016 HR‑V and 2016 Pilot. Thanks to Honda’s EarthDreams® Technology, these all-new crossovers offer drivers remarkable functionality and capability, while still achieving exceptional fuel-economy ratings and low emissions. The imagination of Honda engineers exceeded earthly limits by pioneering a new type of jet aircraft—the HondaJet®, the ultimate in advanced light-jet travel that consumes far less fuel than conventional jets in its class. And let’s not forget ASIMO®, a Honda robot that walks, talks and sings—and serves as an advanced study in mobility to inspire out-of-the-box thinking. Honda’s innovative spirit is alive and well. It’s evident in a wide variety of products. And as Honda continues to innovate, those products will continue to improve lives— which is what “The Power of Dreams” is all about. Design Concept The all-new Honda HR‑V is a sleekly styled CUV that offers exceptional versatility, advanced connectivity, excellent fuel efficiency1 and fun-to-drive performance —all in a highly affordable package. http://dfgdev.rpa-dev.com/honda/print-model.aspx?modelname=HR-V&m…ng;safety;walkaround;competition;features;technologies&host=honda Page 1 of 114 Facts Guide 9/18/17, 254 PM What's New The 2016 Honda HR‑V is new from the ground up. -

2006Redlinecatalog.Pdf
-SM Featured Product Pages Products Brakes 2-14 Running Gear 15-20 Towing Accessories 21-25 Electrical 26-38 Hardware 39-42 Jacks, Couplers & Fenders 43-46 Technical Info & Indexes 47-48 The Redline Story Redline Products, LLC may seem like a new com- Today, Redline Products, LLC is located in a pany, but we’re far from it! In fact, the Redline 20,000 sq. ft. facility with state-of-the-art packag- brand was created in 1989 by Redneck Trailer ing tools, a lean management staff, a manufactur- Supplies as a captive point-of-purchase packag- ing ERP system, and a warehouse to stock fast ing operation and was located within their facili- moving products. We have upgraded our pack- ty. The Redline brand grew steadily over the fol- aging graphics and methods to help customers lowing years to become one of the most recog- locate and purchase the exact part they need. nized packaged trailer parts brands in the trailer The color-coded bars located at the top of each parts aftermarket. With over 500 packaged trail- package guide the customer quickly to the right er parts, Redline has one of the broadest trailer product category. The product description and repair parts selections in the business. And, with application information on the front and back of our strategic alliance with the largest trailer parts the package helps to target the specific part that distributor in the country, we have fast, easy will do the job. We believe in making the right access to just about any trailer part you need. -
MACH 26 Instructions
Carburetor Adjustments Starting Your Engine For The First Time power potential. First run attempts can be more frustrating than with other (less powerful) sport engines, so take Your Mach 26 engine comes equipped with a pre- The first start of your engine is the most critical time of your time—it will be worth the wait! cision slide-valve carburetor. Take a moment to review the engine’s life, dictating how well it will perform. After the pictures below to familiarize yourself with the various installing the engine in your model and inserting the glow Glow plug failure is a common occurrence when breaking functions of the carb. Loosening the nut located on the plug, turn on your radio system and attach a glow igniter in a new engine. To test your plug, let the engine idle at side of the crankcase under the carburetor body will allow to the glow plug. a properly adjusted low-speed needle setting with the glow igniter attached. Then, remove the igniter. If you hear you to rotate the carburetor. Make certain to mount the When using a recoil starter, never pull the rope throttle arm to the side required by your particular vehicle. no appreciable change in engine rpm, then the plug is MACH .26 out to its full length, as doing so may cause still good. If the engine loads up and the rpm’s decrease, Although preset at the factory, some changes in the damage and recoil starter failure. Quick, short it’s time to replace the glow plug. Owner’s Manual needle setting can occur during shipping and handling. -
Engine Inspection After Overboost.Pdf
MANDATORY 652 Oliver Street Williamsport, PA 17701 U.S.A. Tel. 5703236181 Fax. 5703277101 SERVICE BULLETIN www.lycoming.com DATE: September 29, 2010 Service Bulletin No. 592 (Supersedes Service Bulletin No. 369J) Engineering Aspects are FAA (DER) Approved SUBJECT: Engine Inspection after Overboost MODELS AFFECTED: All Lycoming piston engines. TIME OF COMPLIANCE: As required by the subject bulletin. NOTE Prior to maintenance, review the entire Service Bulletin to be sure you have a complete understanding of the procedure and requirements to prevent mistakes from an incomplete review of all of the information in this document. This Service Bulletin contains information about required corrective action to take in response to engine overboost on Lycoming supercharged and turbocharged engines. This information was in Service Bulletin No. 369J. With the revision, Service Bulletin No. 369K, this overboost information has now been moved to this Service Bulletin as a stand alone document for clarity. Overboost in Supercharged and Turbocharged Engines Overboost is a condition in which a reciprocating engine (which has either a supercharger or turbocharger) exceeds maximum rated manifold pressure. While this increase in manifold pressure supports engine operation during flight, during ground operation and takeoff, an excess manifold pressure can damage the engine if it is not controlled correctly. If the throttle is opened too quickly, the high pressure enters the cylinders and is compressed to even higher pressure which can cause detonation, overheating, or cylinder damage. The following control the maximum manifold pressure of supercharged/turbocharged engines: • Redline throttle control by pilot usually reached somewhere before fullopen throttle, depending upon density altitude • Preset density controller senses compressor discharge density and varies the manifold pressure to enable the engine to power up to critical altitude, regardless of the density altitude. -

Contents Page Preface ' 7 Chapter 1 — Introduction 9 Chapter 2— The
Contents Page Preface ' 7 Chapter 1 — Introduction 9 Chapter 2— The cylinder head 13 Chapter 3 — Porting and cylinder scavenging 27 Chapter 4 — The exhaust 76 Chapter 5 — Carburation 93 Chapter 6 — Ignition 125 Chapter 7— The bottom end 143 Chapter 8— Lubrication and cooling 166 Chapter 9— Power measurement and gearing 174 Appendix I — Introduction 187 A Motocross modifications 187 B Enduro modifications 198 C Road race modifications 202 Appendix II— Table of useful equivalents 219 Appendix III—Speciality suppliers • 220 Index 222 Preface FROM A very humble beginning, the two-stroke internal combustion engine has now been developed to a degree that was not thought possible just a few years ago. I am sure even the engineers who have stood by the two-stroke principle for so long find it staggering that this mechanically simple device can produce as much power as it does today, with relative reliability. Originally, I looked upon two-stroke engines with contempt. They made a horrible ring-ding noise, nothing like the beautiful note of four-stroke racing engines. They emitted a blue haze from their tailpipes too, which appeared unsightly, long before any of us heard of the word pollution. On hot days these engines seized with monotonous regularity. Difficult starting, flooding and plug fouling seemed the order of the day. Consequently I wrote off two-strokes, convinced I would never lower myself to develop one of these unreliable little beasts in my workshop. But that all changed when two of my friends bought themselves 250cc Bultaco Pursang motocross bikes and insisted I prepared them. -

Engine Optimisation and Performance Characteristics for a Formula SAE Race Car
University of Southern Queensland Faculty of Engineering and Surveying Engine Optimisation and Performance Characteristics for a Formula SAE Race Car A dissertation submitted by Melinda Rachel Plank in fulfilment of the requirements of Courses ENG4111 and 4112 Research Project towards the degree of Bachelor of Engineering (Mechanical) Submitted: October, 2005 i Abstract This dissertation documents an investigation into determining methods of achieving optimised engine performance. Designs for improved intake and exhaust systems are also presented, and have formed an important focus of the project overall. Methods for modifying a dynamometer and results of engine testing using this equipment comprise another important aspect of this dissertation. Optimisation of engine performance in this case was required for a specific application. Therefore, preliminary research involved identifying specific engine performance requirements in the application of Formula SAE, together with determining full specification of engine characteristics for a 1994 Yamaha YZF600 engine. The most crucial aspects of engine operation requiring improved performance were identified, to determine directions for pursuing modifications to existing components. As a result, custom intake and exhaust systems have been designed for use on the YZF600, according to the relevant fundamental engineering principles and empirical correlations. A mechanism for determining engine operating characteristics and quantifying and comparing engine performance also formed an integral component of this project. Research into potential dynamometer options was carried out to determine the most suitable option to be modified for use in Formula SAE engine testing. Modification of this dynamometer enabled determination of benchmark performance characteristics; however, attempts to test the 2004 inlet manifold indicated that the dynamometer itself was not suitable for determining the performance of an engine in this configuration. -

Engine (Liter; CID). All Other Original Equipment Emission Control Devices
(Page 1 of 3) State of California AIR RESOURCES BOARD EXECUTIVE ORDER D-133-12 Relating to Exemptions under Section 27156 of the Vehicle Code REDLINE, INC., A SUBSIDIARY OF IMPAC REDLINE CARBURETOR CONVERSION KITS #K8607 AND #K8608 USING ONE (1) WEBER MODEL 32/34 DFT9 A or 32/39 DFT11 A Pursuant to the authority vested in the Air., Resources Board by Section 27156 of the Vehicle Code; and Pursuant to the authority vested in the undersigned by Sections 39515 and 39516 of the Health and Safety Code and Executive Order G-45-5; IT IS ORDERED AND RESOLVED: That the installation of the Redline Carburetor Conversion Kits #K8607 and #K8608 using one (1) Weber 32/34 DFT9 A or 32/34 DFT11 A carburetor have been found not to reduce the effectiveness of required motor vehicle pollution control devices and, therefore, are exempt from the prohibitions of Section 27156 of the Vehicle Code for the vehicles listed below: Year Make Model Engine (liter; CID). Redline Kit No. 1977-1978 Ford. Courier 2.3, 140 K8607 1979-1980 Ford Courier 2.3, 140 K8608 The following modifications to the exhaust emission control system are permitted: 1) The throttle positioner (dashpot), on vehicles so equipped, may be removed. 2) The deceleration control valve (Coasting Richer valve) and accelerator microswitch, on vehicles so equipped, may be disconnected and removed. 3) The vacuum hose routing may be changed as specified in the installation instructions. All other original equipment emission control devices must be retained. The vehicle must be tuned to the vehicle manufacturer's specifications. -

2010 Redline Sv U-M-109-0004
California Environmental Protection Agency EXECUTIVE ORDER U-M-109-0004 REDLINE HOLDING LLC New Emission-Compliant CI AIR RESOURCES BOARD Off-Highway Recreational Vehicles Pursuant to the authority vested in the Air Resources Board by the Health and Safety Code, Division 26, Part 5, Chapters 1 and 2; and Pursuant to the authority vested in the undersigned by Health and Safety Code Sections 39515 and 39516 and Executive Order G-02-003; IT IS ORDERED: The engine and exhaust emission control systems produced by the manufacturer are certified as described below for off-highway recreational vehicles. Production vehicles shall be in all material respects the same as those for which certification is granted. The manufacturer shall ensure that character "C" or "3" is not used in the eighth (8") position of the vehicle identification number (VIN) of all vehicles in the engine family listed below. Violation of this VIN provision may result in incorrect registration of the vehicles. MODEL ENGINE VEHICLE FUEL SPECIAL FEATURES & YEAR ENGINE FAMILY DISPLACEMENT (cc) TYPE TYPE EMISSION CONTROL SYSTEMS 2010 ARDLX.750REV 749 SV Gasoline SFI VEHICLE MAKE and MODEL / ENGINE CODE (EIM in "kg" for Certification Chassis Testing, or Rated Power in "KW" or "hp" for Certification Engine Testing MAKE ENGINE (CC) VEHICLE MODEL MAKE ENGINE (CC) VEHICLE MODEL REDLINE 749 REVOLT / ARDLX.750REV (51.5 *W) REDLINE 749 REVOLT XL / ARDLX.750REV (51.5 KW) REDLINE RIOT / ARDLX.750REV (51.5 KW) ATV=all-terrain vehicle; OFMC=offroad motorcycle; UV-off-road utility vehicle;