Analyzing Cyber-Physical Threats on Robotic Platforms †
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Interview with Mark Tilden (Photo Courtesy of Wowwee Ltd.) Wowwee Courtesy of (Photo
APPENDIX ■ ■ ■ Interview with Mark Tilden (Photo courtesy of WowWee Ltd.) WowWee courtesy of (Photo Figure A-1. Here’s Mark Tilden at the 2005 New York Toy Fair. I have used excerpts from this interview throughout the book where applicable, but I also wanted to print it in its entirety. Some things, like Mark’s wonderful commentary on Hong Kong cuisine and his off-the-cuff comments on everything and anything, just didn’t fit into the structure of The Robosapien Companion, but they will be of interest to anyone who is curious about or admires the man behind the robots. 291 292 APPENDIX ■ INTERVIEW WITH MARK TILDEN This interview was conducted on February 13, 2005, at Wolfgang’s Steakhouse in the Murray Hill neighborhood of midtown Manhattan, in New York City. I recorded it with an Olympus DM-10 voice recorder. The dining room at Wolfgang’s is known for its historic tiled ceilings designed by Raphael Guastavino. They are beautiful, but they are an acoustic night- mare! Fortunately, my trusty DM-10 was up to the task. I have edited this only very lightly, mainly breaks where we spoke to waiters and so on. Also note that during a portion of this interview, Mark is showing me a slideshow on a little portable LCD screen. Most of the pictures from the slideshow ended up in Chapter 3. But if during the interview he seems to be making a reference, chances are it is to something on the screen. Without further ado, here is the full text of the interview. -

Laboratorio De Robots Autónomos En El Contexto De Las Carreras De Informática Experiencias Para Su Implementación Resumen 1
Laboratorio de Robots Autónomos en el Contexto de las Carreras de Informática Experiencias para su Implementación J. Ierache (1,2) M Dittler(1,2), H Padovani (2) (1)Instituto de Sistemas Inteligentes y Enseñanza experimental de la Robótica (ISIER) (2)Facultad de Informática Ciencia de la Comunicación y Técnicas Especiales Universidad de Morón Cabildo 134, (B1708JPD) Morón, Buenos Aires, Argentina 54-11-56272000 interno 189/746 (1,2) {jierache, pdittler, hpadovani } @unimoron.edu.ar Resumen Este trabajo presenta nuestras experiencias para la implementación de un laboratorio de sistemas autónomo de robots aplicado a la formación de estudiantes iniciales y avanzados en carreras de informática, considerando las tecnologías especificas, robots, juguetes autónomos, lenguajes y ambientes de programación, como así también la construcción de un robot bípedo de programación abierta a partir de un juguete. Estos robots por su bajo costo y la documentación disponible facilitan un amplio acceso a distintas Universidades e Institutos. En este contexto, la enseñanza de programación aplicada a través de sistemas autónomos de robots facilita la interacción entre sistemas autónomos, el ambiente de actuación, dispositivos de comunicación celulares, PDA, entre otros dispositivos. Presentan una oportunidad estratégica para la formación de recursos humanos cubriendo diversos aspectos desde la elaboración de la especificación, modelado, desarrollo del software e implementación y pruebas de un sistema autónomo de robots Palabras claves: Robótica, Tecnologías -

Robosapien V2 Diagnostics
Robosapien V2 Diagnostics Infared Sensors Color Detection Sound Detection Precision grip Humanoid Hip Movement Bi-pedal motion Foot Sensors Compatibility Flexibility Picking up pins, lying down, and dancing are no problem for Robosapien V2. Fluid hip and joint movement make the new Robosapien seem more life-like than before. Smooth movement in the arms allows the Robosapien V2 to pick up objects and even do some bowling on the side. True bipedal movement is possible in the Robosapien V2 through the use of hip movement and even has five walking gaits as well. Wish you could have someone else teach your pet (robot) dog a trick or two? Many advances have been made to the Robosapien V2 robot. One great leap the Robosapien has made is the ability to interact with both roboraptor and robopet. Robosapien V2 will have robopet perform tricks and tame the most unruly roboraptor. Programming Intelligence The Robosapien Infrared sensors on the robot’s head allow it to follow a laser path set by remote control and detect nearby obstacles. The has six different program modes. color vision system allows Robosapien to identify skin tones and colors. Sensors on each side of Robosapien V2’s head Remote control, guard, demo, programmable, allow it to hear nearby sounds and react to the world. and autonomous are five of those different modes. Autonomous mode allows Robosapien V2 to move freely on its own and interact with its environment. Touch sensors on each finger let Robosapien V2 know if it Remote control mode allows you to control your has picked up any objects. -
Roboboa User Manual
ROBOBOAA Fusion of Technology and Personality User Manual Item No. 8032 | Ages 8+ Welcome ongratulations on purchasing your new C Roboboa™ from Wowwee, a cool sci-fi tech toy with mood and mobility. Combining advanced A.I. animations with lights, vision, and sound, Roboboa is a smart desk light, wake-up alarm, scanning room guard, disco marquee, roving tank, safety light, playful cannon, and friendly and attentive “alien” robot. Fun and useful for the whole family! Hold m o d Please read these instructions carefully for e details on how to get the most out of your tail/head Roboboa. R eset Strafe track S can Lazer Package contents explore S leep Cannon 1 x Roboboa alarm D aily Test 1 x Remote controller guard Se ntry Patrol This user manual demo Pa rty Volume execute Pr ogram Back 1 Welcome ongratulations on purchasing your new C Roboboa™ from Wowwee, a cool sci-fi tech toy with mood and mobility. Combining advanced A.I. animations with lights, vision, and sound, Roboboa is a smart desk light, wake-up alarm, scanning room guard, disco marquee, roving tank, safety light, playful cannon, and friendly and attentive “alien” robot. Fun and useful for the whole family! Hold m o d Please read these instructions carefully for e details on how to get the most out of your tail/head Roboboa. R eset Strafe track S can Lazer Package contents explore S leep Cannon 1 x Roboboa alarm D aily Test 1 x Remote controller guard Se ntry Patrol This user manual demo Pa rty Volume execute Pr ogram Back 1 Contents Contents Welcome p.1 Remote controller quick reference -

Is Your Roomba Male Or Female? the Role of Gender Stereotypes and Cultural Norms in Robot Design
Intersect, Volume 2, Number 1 (2009) Is Your Roomba Male or Female? The Role of Gender Stereotypes and Cultural Norms in Robot Design Micol Marchetti-Bowick Stanford University Introduction In cultures all over the world, gender plays a central role in each individual’s identity as well as in the way people interpret others’ actions, thoughts, and emotions. Today, as robots begin to creep further and further out from futuristic films and science fiction novels and into the here and now of day-to-day life, they too need to be understood and interpreted as a part of society. Because gender is such a key part of human identity, it is also often used as a starting point for a robot’s persona, particularly if the robot has any human-like physical attributes such as a face or body. The majority of these robots, whether created as toys, tools, or commodities, possess gender-specific features that identify them as either male or female. In many cases, even the most ambiguously gendered robots are referred to consistently as either “he” or “she”—rarely is the pronoun “it” used. Whether these gender identities are explicit or subtle, and whether they are expressed through form or function, they contribute towards establishing the robot’s role in society. A robot’s designer can precisely dictate what its physical and behavioral features will be. As a result, the gendered attributes that are projected onto robots reflect many of the assumptions and stereotypes about gender that are present in the minds of both the designer and the robot’s potential users. -
Use of Low Cost Personal Robots for the Encouragement, Demonstration and Assessment of Physical Activities
Use of Low Cost Personal Robots for the Encouragement, Demonstration and Assessment of Physical Activities Thitipong Nandhabiwat M.Sc. (Information Science), University of Pittsburgh, USA B.Sc. (Computer Science), University of Waikato, NZ This thesis is presented for the degree of Doctor of Information Technology of Murdoch University January 2011 i DECLARATION I declare that this thesis is my own account of my research and contains as its main content work, which has not previously been submitted for a degree at any tertiary education institution. To the best of my knowledge the thesis contains no material previously published or written by another person, except where due reference has been made in the text. ____________________________ Thitipong Nandhabiwat ii ABSTRACT One of the biggest challenges today is the issue of an overweight population. The issue is expected to impose tremendous pressure on the economic and financial health of a nation. The problem is now affecting developed and developing countries alike. In countries such as the USA and Australia, it has been reported that over 50% of the adult population are now either overweight or obese and the situation is expected to get worse. In developing countries like China, India and Thailand, similar problem is also emerging and in particular among the younger generation who has been exposed to wide varieties of processed or “junk” food. Apart from dietary and genetic reasons, the root cause of the weight problem is lacking of physical activities. With the increasing choices of indoor entertainment and transport facilities, in particular private cars, adult and children are now on average burning less daily calories while consuming more food loaded with high levels of sugar and fat. -
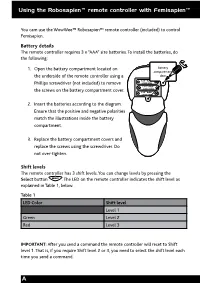
A Using the Robosapien™ Remote Controller with Femisapien™
Using the Robosapien™ remote controller with Femisapien™ You cam use the WowWee™ Robosapien™ remote controller (included) to control Femisapien. Battery details The remote controller requires 3 x “AAA” size batteries. To install the batteries, do the following: 1. Open the battery compartment located on Battery compartment the underside of the remote controller using a door 1.5V "AAA" Phillips screwdriver (not included) to remove LR03 UM4 1.5V "AAA" the screws on the battery compartment cover. LR03 UM4 1.5V "AAA" LR03 UM4 2. Insert the batteries according to the diagram. Ensure that the positive and negative polarities match the illustrations inside the battery compartment. 3. Replace the battery compartment covers and replace the screws using the screwdriver. Do not over-tighten. Shift levels The remote controller has 3 shift levels. You can change levels by pressing the Select button SELECT . The LED on the remote controller indicates the shift level as explained in Table 1, below. Table 1 LED Color Shift level Level 1 Green Level 2 Red Level 3 IMPORTANT: After you send a command the remote controller will reset to Shift level 1. That is, if you require Shift level 2 or 3, you need to select the shift level each time you send a command. A Remote controller overview LED transmitter T P HU EE MP SW S P W UM 1 EEP TH 2 T P LED shift indicator A IC P L K U K 5 U K B H A P IC 1 L P IG E C E A K 3 H IK N 4 TR S S TR N IK EA E 5 L 1 6 TH W R O W O R P H W TH R IS 7 U T 8 B LE SLEEP LISTEN 9 STRIKE 2 STRIKE 2 10 B U LL P D E O T Z S E 11 R R E S E T P TU E R T N S S N T 12 R E 14 P U T S T 3 R I E K IK 13 E R 3 T S B A 15 C K S S P T O E O P SELECT Shift select 16 18 R IG H T LEFT E 17 S C O N N IC A D D E M 2 O O E M XE 1 DE CU 19 TE ALL DEMO 20 WA F KE UP POWER OF B Remote controller functions The control functions for each level are explained in the following table (Table 2). -

A Spotlight on Security and Privacy Risks with Future Household Robots: Attacks and Lessons
A Spotlight on Security and Privacy Risks with Future Household Robots: Attacks and Lessons Tamara Denning, Cynthia Matuszek, Karl Koscher, Joshua R. Smith, and Tadayoshi Kohno Computer Science and Engineering, University of Washington Paul G. Allen Center Box 352350 Seattle, WA 98195 {tdenning, cynthia, supersat, jrs, yoshi}@cs.washington.edu ABSTRACT however, there is currently a marked void in the considera- Future homes will be populated with large numbers of robots tion of the security and privacy risks associated with house- with diverse functionalities, ranging from chore robots to el- hold robotics. The need for such considerations is clear: fu- der care robots to entertainment robots. While household ture robots in the home could introduce new or amplify ex- robots will offer numerous benefits, they also have the po- isting security and privacy risks for homeowners and other tential to introduce new security and privacy vulnerabilities occupants. In many cases it may not be obvious how to over- into the home. Our research consists of three parts. First, to come these security and privacy risks. serve as a foundation for our study, we experimentally ana- lyze three of today’s household robots for security and pri- The purpose of this paper is to explore these potential secu- vacy vulnerabilities: the WowWee Rovio, the Erector Spy- rity and privacy risks, identify the associated challenges, and kee, and the WowWee RoboSapien V2. Second, we synthe- present suggestions for overcoming these challenges. We ar- size the results of our experimental analyses and identify key gue that now is the ideal time to conduct such research, while lessons and challenges for securing future household robots. -
The Official Robosapien Hacker's Guide 255 Pages
The Official Robosapien Hacker's Guide 255 pages From the Back Cover: You''ve owned Robosapien for six months now and you''re wondering three things: what''s inside, how can I hack it, and can I get college credit for this thing? -- Mark W. Tilden TAKE ROBOSAPIEN BEYOND THE LIMIT -- HACK IT! The Official Robosapien Hacker''s Guide is a true insider''s sourcebook of over one dozen fun, inexpensive, and high-performance hacks that you can perform on the world’s best-selling robot of all time. This manual is fully endorsed by WowWee Ltd., Robosapien''s manufacturer, and features an introduction by Mark W. Tilden, Robosapien''s designer! You''ll learn how to make Robosapien do things you never thought possible. So if you''re ready to make the award-winning Robosapien more appealing, capable, and compelling than it already is, tighten your chin strap and take a look inside. This book gives you -- • Complete, step-by-step illustrated guidance on hacking the brains out of Robosapien • An inside-out Crack ''n Hack guide to Robosapien''s anatomy • Full directions on controlling your robot with a Mac or PC • How to''s for converting Robosapien from remote infrared (IR) to remote radio control (RC) • A candid interview with Mark Tilden, robot designer extraordinare • Enough handholding to make you think that we ought to be dating • Instructions on remote programming and wireless surveillance from anywhere within your house • One of the most complete Robosapien reference guides on Earth • Some fashion sense on how to make a designer''s statement with a new Robosapien wardrobe • A backstage pass to meet the next generation of robots -- a full preview of V2, RoboRaptor, and RoboPet! MAXIMIZE YOUR ROBOSAPIEN FUN! About the Author Dave Prochnow is a frequent contributor to MacAddict, MAKE, Nuts and Volts, and SERVO Magazine, as well as the award-winning author of 25 nonfiction books including the best-selling Experiments with EPROMs. -
Roboremote User Manual
User manual Ages 8+ Item No. 8000 Contents Introduction..................................................................................................................... 1 Package contents........................................................................................................... 2 Battery details................................................................................................................ 3 Battery requirements................................................................................................... 3 Battery installation.......................................................................................................3 Roboremote basics....................................................................................................... 4 Terminology..................................................................................................................4 Remote controller....................................................................................................... ..4 Roboremote software interface............................................................................... ..6 System requirements.................................................................................................. ..6 Installing the software................................................................................................ 7 Running the software................................................................................................. 7 Software overview....................................................................................................... -

Robótica En El Contexto De Las Tecnologías De La Educación
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by SEDICI - Repositorio de la UNLP IX Congreso de Tecnolog´ıaen Educaci´on& Educaci´onen Tecnolog´ıa 364 Robótica en el Contexto de las Tecnologías de la Educación Gustavo Pereira 1,Jorge Ierache 1 Norberto Mazza1 ,Juan Iribarren 1, Rodolfo Meda 1,Diego Avila 1, Emiliano Lorusso 1, Sofia Fasce 1 Instituto de Sistemas Inteligentes y Enseñanza Experimental de la Robótica (ISIER) 1 Laboratorio de sistemas de información avanzados Facultad de Ingeniería Universidad de Buenos Aires 2 ISIER, Facultad de Informática Ciencias de la Comunicación y Técnicas Especiales Universidad de Morón, Cabildo 134, (B1708JPD) Morón, Buenos Aires, Argentina 54 11 5627 200 int 189 [email protected] Resumen construcción de un robot físico y la programación de su comportamiento en Mediante la implementación y ampliación de ambientes reactivos, cooperativos y kits de robótica o dispositivos que son competitivos. considerados juguetes se pueden realizar experiencias en el contexto de las Tecnologías En trabajos anteriores Ierache et al [2], [3],[4] de la Educación con alumnos de niveles se trató la aplicación de un Laboratorio de iniciales e inclusive con alumnos de niveles Sistemas Autónomos de Robots (LSAR) el más avanzados. que colabora con distintas áreas en los procesos de formación de alumnos en el marco Los alumnos iniciales pueden inclusive del contexto propuesto en figura 1, se observa incorporarse al mundo de la programación al el Paradigma bajo el cual el alumno desarrolla observar de una forma mucho más clara y su trabajo, la Metodología que se aplica bajo el atrayente el resultado de su código.