Analysis and Analogue Computer Representation of Commutating Machines and Its Application to Control Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mutual Inductance and Transformer Theory Questions: 1 Through 15 Lab Exercise: Transformer Voltage/Current Ratios (Question 61)
ELTR 115 (AC 2), section 1 Recommended schedule Day 1 Topics: Mutual inductance and transformer theory Questions: 1 through 15 Lab Exercise: Transformer voltage/current ratios (question 61) Day 2 Topics: Transformer step ratio Questions: 16 through 30 Lab Exercise: Auto-transformers (question 62) Day 3 Topics: Maximum power transfer theorem and impedance matching with transformers Questions: 31 through 45 Lab Exercise: Auto-transformers (question 63) Day 4 Topics: Transformer applications, power ratings, and core effects Questions: 46 through 60 Lab Exercise: Differential voltage measurement using the oscilloscope (question 64) Day 5 Exam 1: includes Transformer voltage ratio performance assessment Lab Exercise: work on project Project: Initial project design checked by instructor and components selected (sensitive audio detector circuit recommended) Practice and challenge problems Questions: 66 through the end of the worksheet Impending deadlines Project due at end of ELTR115, Section 3 Question 65: Sample project grading criteria 1 ELTR 115 (AC 2), section 1 Project ideas AC power supply: (Strongly Recommended!) This is basically one-half of an AC/DC power supply circuit, consisting of a line power plug, on/off switch, fuse, indicator lamp, and a step-down transformer. The reason this project idea is strongly recommended is that it may serve as the basis for the recommended power supply project in the next course (ELTR120 – Semiconductors 1). If you build the AC section now, you will not have to re-build an enclosure or any of the line-power circuitry later! Note that the first lab (step-down transformer circuit) may serve as a prototype for this project with just a few additional components. -

DRM105, PM Sinusoidal Motor Vector Control with Quadrature
PM Sinusoidal Motor Vector Control with Quadrature Encoder Designer Reference Manual Devices Supported: MCF51AC256 Document Number: DRM105 Rev. 0 09/2008 How to Reach Us: Home Page: www.freescale.com Web Support: http://www.freescale.com/support USA/Europe or Locations Not Listed: Freescale Semiconductor, Inc. Technical Information Center, EL516 2100 East Elliot Road Tempe, Arizona 85284 1-800-521-6274 or +1-480-768-2130 www.freescale.com/support Europe, Middle East, and Africa: Freescale Halbleiter Deutschland GmbH Technical Information Center Information in this document is provided solely to enable system and Schatzbogen 7 software implementers to use Freescale Semiconductor products. There are 81829 Muenchen, Germany no express or implied copyright licenses granted hereunder to design or +44 1296 380 456 (English) fabricate any integrated circuits or integrated circuits based on the +46 8 52200080 (English) information in this document. +49 89 92103 559 (German) +33 1 69 35 48 48 (French) www.freescale.com/support Freescale Semiconductor reserves the right to make changes without further notice to any products herein. Freescale Semiconductor makes no warranty, Japan: representation or guarantee regarding the suitability of its products for any Freescale Semiconductor Japan Ltd. particular purpose, nor does Freescale Semiconductor assume any liability Headquarters arising out of the application or use of any product or circuit, and specifically ARCO Tower 15F disclaims any and all liability, including without limitation consequential or 1-8-1, Shimo-Meguro, Meguro-ku, incidental damages. “Typical” parameters that may be provided in Freescale Tokyo 153-0064 Semiconductor data sheets and/or specifications can and do vary in different Japan applications and actual performance may vary over time. -

Power Management Consortium (PMC) Nuggets
CPES ANNUAL REPORT 2020 103 Power Management Consortium (PMC) Nuggets 104 Low Loss Integrated Inductor and Transformer Structure and Application 114 Design Optimization of an Unregulated LLC Converter with Integrated in Regulated LLC Converter for 48 V Bus Converter Magnetics for a Two-Stage, 48 V VRM 105 Magnetic Integration of Matrix Transformer with a Highly Controllable 115 Wide-Voltage Range, High-Efficiency Sigma Converter 48 V VRM with Leakage Inductance Integrated Magnetics 106 Control Technique for CRM-Based, High-Frequency, 116 Modeling and Control for a 48 V/1 V Sigma Converter for Very Fast Soft-Switching Three-Phase Inverter Under Grid Fault Condition Transient Response 107 Critical Conduction Mode-Based, High-Frequency, Single-Phase 117 A Two-Stage Rail Grade DC-DC Converter Based on a GaN Device Transformerless PV Inverter 118 Design-Oriented Equivalent Circuit Model for Resonant Converters 108 Transmitter Coil Design for Free-Positioning Omnidirectional Wireless 119 Critical-Conduction-Mode-Based Soft-Switching Modulation for Three- Power Transfer System Phase PV Inverters with Reactive Power Transfer Capability 109 Shielding Study of a 6.78 MHz Omnidirectional Wireless Power Transfer 120 Improved Three-Phase Critical-Mode-Based Soft-Switching Modulation System Technique with Low Leakage Current for PV Inverter Application 110 The LCCL-LC Resonant Converter and Its Soft Switching Realization for 121 Balance Technique for CM Noise Reduction in Critical-Mode-Based Three- Omnidirectional Wireless Power Transfer Systems Phase -

Fall 2011 Meeting Minutes Boston MA November 3,2011
IEEE/PES Transformers Committee Fall 2011 Meeting Minutes Boston MA November 3,2011 Unapproved IEEE/PES Transformers Committee Meeting Fall 2011 Boston MA Committee Members and Guests Registered for the Spring 2011 Meeting Albers, Timothy: II Bertolini, Edward: AP - LM Campbell, James: II Allaway, Dave: II Berube, Jean-Noel: II Carlos, Arnaldo: AP Allaway, Marcene: SP Betancourt, Enrique: CM Caronia, Paul: II Allen, Jerry: AP Bhatia, Paramjit: II Caskey, John: AP Allen, Abbey: II Binder, Wallace: CM Caskey, Melissa: G Alton, Henry: II Bishop Jr, Wayne: II Castellanos, Juan: CM Amos, Richard: CM Bishop, Cherie: SP Castillo, Alonso: II Amos, Norann: SP Blackburn, Gene: CM Castillo, Karla: SP Anderson, Gregory: CM Blackburn, Martha: SP Chadderdon, Philip: II Anderson, Jeffrey: II Blackmon, Jr., James: AP Cheim, Luiz: AP Angell, Don: AP Blackmon, Donna: SP Cherry, Donald: CM Ansari, Tauhid: AP Blaydon, Daniel: CM Chiodo, Vincent: II Anthony, Stephen: II Boettger, William: CM Chisholm, Paul: AP Antosz, Stephen: CM Boettger, Pat: SP Chiu, Bill: CM Armstrong, James: AP Bolliger, Alain: AP Lu, Minnie: SP Arpino, Carlo: CM Bolliger, Dominique: SP Chmiel, Frank: AP Arpino, Tina: SP Boman, Paul: CM Choinski, Scott: AP Asano, Roberto: AP Borowitz, James: II Bartholomew, Kathy: SP Atef, Kahveh: II Botti, Michael: II Christodoulou, Larry: II Averitt, Ralph: II Botti, Nicole: SP Chrobak, John: II Ayers, Donald: CM Bozich, Bradford: II Chu, Donald: CM Bae, Yongbae: II Bradford, Ira: II Claiborne, C. Clair: CM Ballard, Jay: AP Brady, Ryan: II Cocchiarale, -
Application Note AN-1024 Flyback Transformer Design for The
Application Note AN-1024 Flyback Transformer Design for the IRIS40xx Series Table of Contents Page 1. Introduction to Flyback Transformer Design ...............................................1 2. Power Supply Design Criteria Required .......................................................2 3. Transformer Design Process.........................................................................2 4) Transformer Construction .............................................................................9 4.1) Transformer Materials..................................................................................10 4.2) Winding Styles.............................................................................................12 4.3) Winding Order..............................................................................................12 4.4) Multiple Outputs...........................................................................................12 4.5) Leakage Inductance ....................................................................................13 5) Transformer Core Types ..............................................................................14 6) Wire Table .....................................................................................................16 7) References ....................................................................................................17 8) Transformer Component Sources...............................................................17 One of the most important factors in the design of -

The Performance of a Special Repulsion Motor in A
THE PERFORMANCE OF A SPECIAL REPULSION MOTOR IN A CLOSED-LOOP POSITIONING SYSTEM A THESIS Presented to the Faculty of the Graduate Division by Eugene Dale McCalia In Partial Fulfillment of the Requirements for the Degree Master of Science in Electrical Engineering Georgia Institute of Technology June, 1959 "In presenting the dissertation as a partial fulfillment of the requirements for an advanced degree from the Georgia Institute of Technology, I agree that the Library of the Institution shall make it available for inspection and circulation in accordance with its regulations governing materials of this type. I agree that permission to copy from, or to publish from, this dissertation may be granted by the professor under whose direction it was written, or, in his absence, by the dean of the Graduate Division when such copying or publication is solely for scholarly purposes and does not involve potential financial gain. It is understood that any copying from, or publication of, this dissertation which involves potential financial gain will not be allowed without written permission. THE PERFORMANCE OF A SPECIAL REPULSION MOTOR IN A CLOSED-LOOP POSITIONING SYSTEM Approved: Z2^__ ^ L.J& a M. Date of Approval: )vkv ^-6 ~ l<i^c/ .J- ...... ' •' ' "t' 11 ACKNOWLEDGMENTS The author wishes to acknowledge with appreciation his indebted ness to Dr. F. 0. Nottingham, Jr. who suggested the problem and also for the assistance and encouragement that he so cheerfully contributed throughout the course of this study, To my wife, I express appreciation for her love, patience and understanding and also for her assistance and encouragement in the preparation of the final draft. -
Modeling, Analogue and Tests of an Electric Machine
MODELING, ANALOGUE AND TESTS OF AN ELECTRIC MACHINE VOLTAGE CONTROL SYSTEM 'by GRAHAM E.' DAWSON ( j B.A.Sc, University of British. Columbia, 1963. A THESIS SUBMITTED IN PARTIAL FULFILMENT OF THE REQUIREMENTS, FOR THE DEGREE OF MASTER OF APPLIED SCIENCE. in the Department of Electrical Engineering We accept this thesis as conforming to the required standard Members of the Committee Head of the Department .»»«... Members of the Department of Electrical Engineering THE UNIVERSITY OF BRITISH COLUMBIA September, 1966 In presenting this thesis in partial fulfilment of the requirements for an advanced degree at the University of British Columbia, I agree that the Library shall make it freely.avai1able for reference and study. I further agree that permission for ex• tensive copying of this thesis for scholarly purposes may be granted by the Head of my Department or by his representatives.. It is understood that copying or publication of this thesis for finan• cial gain shall not be allowed without my.written permission. Department of Electrical Engineering The University of British Columbia Vancou ve r.,8, Canada Date 7. MM ABSTRACT This thesis is concerned with the modeling, analogue and tests of an interconnected four electric machine voltage control system. Many analogue studies of electric machines have been done but most are concerned with the development of analogue techniques and only a few give substantiation of the validity of the analogue models through comparison of results from analogue studies and from real machine tests. Chapter 2 describes the procedure and the system under study. Chapter 3 describes the methods used for the determination of the electrical and mechanical system parameters. -

Course Description Bachelor of Technology (Electrical Engineering)
COURSE DESCRIPTION BACHELOR OF TECHNOLOGY (ELECTRICAL ENGINEERING) COLLEGE OF TECHNOLOGY AND ENGINEERING MAHARANA PRATAP UNIVERSITY OF AGRICULTURE AND TECHNOLOGY UDAIPUR (RAJASTHAN) SECOND YEAR (SEMESTER-I) BS 211 (All Branches) MATHEMATICS – III Cr. Hrs. 3 (3 + 0) L T P Credit 3 0 0 Hours 3 0 0 COURSE OUTCOME - CO1: Understand the need of numerical method for solving mathematical equations of various engineering problems., CO2: Provide interpolation techniques which are useful in analyzing the data that is in the form of unknown functionCO3: Discuss numerical integration and differentiation and solving problems which cannot be solved by conventional methods.CO4: Discuss the need of Laplace transform to convert systems from time to frequency domains and to understand application and working of Laplace transformations. UNIT-I Interpolation: Finite differences, various difference operators and theirrelationships, factorial notation. Interpolation with equal intervals;Newton’s forward and backward interpolation formulae, Lagrange’sinterpolation formula for unequal intervals. UNIT-II Gauss forward and backward interpolation formulae, Stirling’s andBessel’s central difference interpolation formulae. Numerical Differentiation: Numerical differentiation based on Newton’sforward and backward, Gauss forward and backward interpolation formulae. UNIT-III Numerical Integration: Numerical integration by Trapezoidal, Simpson’s rule. Numerical Solutions of Ordinary Differential Equations: Picard’s method,Taylor’s series method, Euler’s method, modified -

Power Processing, Part 1. Electric Machinery Analysis
DOCONEIT MORE BD 179 391 SE 029 295,. a 'AUTHOR Hamilton, Howard B. :TITLE Power Processing, Part 1.Electic Machinery Analyiis. ) INSTITUTION Pittsburgh Onii., Pa. SPONS AGENCY National Science Foundation, Washingtcn, PUB DATE 70 GRANT NSF-GY-4138 NOTE 4913.; For related documents, see SE 029 296-298 n EDRS PRICE MF01/PC10 PusiPostage. DESCRIPTORS *College Science; Ciirriculum Develoiment; ElectricityrFlectrOmechanical lechnology: Electronics; *Fagineering.Education; Higher Education;,Instructional'Materials; *Science Courses; Science Curiiculum:.*Science Education; *Science Materials; SCientific Concepts ABSTRACT A This publication was developed as aportion of a two-semester sequence commeicing ateither the sixth cr'seventh term of,the undergraduate program inelectrical engineering at the University of Pittsburgh. The materials of thetwo courses, produced by a ional Science Foundation grant, are concernedwith power convrs systems comprising power electronicdevices, electrouthchanical energy converters, and associated,logic Configurations necessary to cause the system to behave in a prescribed fashion. The emphisis in this portionof the two course sequence (Part 1)is on electric machinery analysis. lechnigues app;icable'to electric machines under dynamicconditions are anallzed. This publication consists of sevenchapters which cW-al with: (1) basic principles: (2) elementary concept of torqueand geherated voltage; (3)tile generalized machine;(4i direct current (7) macrimes; (5) cross field machines;(6),synchronous machines; and polyphase -

DC Motor Workshop
DC Motor Annotated Handout American Physical Society A. What You Already Know Make a labeled drawing to show what you think is inside the motor. Write down how you think the motor works. Please do this independently. This important step forces students to create a preliminary mental model for the motor, which will be their starting point. Since they are writing it down, they can compare it with their answer to the same question at the end of the activity. B. Observing and Disassembling the Motor 1. Use the small screwdriver to take the motor apart by bending back the two metal tabs that hold the white plastic end-piece in place. Pull off this plastic end-piece, and then slide out the part that spins, which is called the armature. 2. Describe what you see. 3. How do you think the motor works? Discuss this question with the others in your group. C. Mounting the Armature 1. Use the diagram below to locate the commutator—the split ring around the motor shaft. This is the armature. Shaft Commutator Coil of wire (electromagnetic) 2. Look at the drawing on the next page and find the brushes—two short ends of bare wire that make a "V". The brushes will make electrical contact with the commutator, and gravity will hold them together. In addition the brushes will support one end of the armature and cradle it to prevent side- to-side movement. 1 3. Using the cup, the two rubber bands, the piece of bare wire, and the three pieces of insulated wire, mount the armature as in the diagram below. -
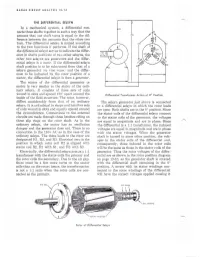
In a Mechanical System, a Differential
RADAR CIRCUIT ANALYSIS 13-14 THE DIFFERENTIAL SElSYN In a mechanical system, a differential con- 52 nects three shafts together in such a way that the amount that one shaft turns is equal to the dif- zsv ference between the amounts that the other two turn. The differential selsyn is named according to the two functions it performs. If the shaft of the differential selsyn serves to indicate the differ- ence in shafts positions of two other selsyns, the other two selsyns are generators and the differ- ential selsyn is a motor. If the differential selsyn shaft position is to be subtracted from that of a 53 selsyn generator (or vice versa) and the differ- ence to be indicated by the rotor position of a i----OV---o-i motor, the differential selsyn is then a generator. ~---OV--~~_-4 ~ The stator of the differential generator or motor is very similar to the stator of the ordi- nary selsyn. It consists of three sets of coils 0 wound in slots and spaced 120 apart around the Differential Transformer Action at 0° Position inside of the field structure. The rotor, however, differs considerably from that of an ordinary The selsyn generator just above is connected selsyn. It is cylindrical in shape and has three sets to a differential selsyn in which the rotor leads of coils wound in slots and equally spaced around are open. Both shafts are in the 0° position. Since the circumference. Connections to the external the stator coils of the differential selsyn connect circuits are made through three brushes riding on to the stator coils of the generator, the voltages three slip rings on the rotor shaft. -

SIE Paper – V – ELECTRICAL MACHINE TECHNOLOGY Unit
Subject Code : SIE Paper – V – ELECTRICAL MACHINE TECHNOLOGY Unit – I: DC Generators and Motors DC Generators : Types of generators – Series wound generator – Separately excited generator – Shunt wound generator – Condition for self excitation – Compound wound generator – Efficiency of DC machines. DC Motors: Back e.m.f. – Speed of a DC motor – Condition for maximum power – Armature reaction and commutation – Characteristics of D.C. motors – Motor starters – Speed control of D.C. motor. Unit – II - Transformers Transformer – Construction – Transformation ratio – Primary – No load current – Transformer on load – Effect of resistance – Equivalent circuit of static transformer – Testing of transformers – Use of transformers with measuring instruments. Unit – III: Electronic Control of AC Motors. Instability of AC motors – Variable speed induction motor drives – Torque speed characteristics of induction motors – Inverters for driving the motor – Speed control of induction motor by variable voltage - fixed frequency supply – Synchronous motor control. Unit – IV: Alternator and Amplidyne. Alternator – Construction – Operation – Frequency - Pitch factor and distribution factor – E.M.F. equation of alternator. Amplidyne – Amplification factor – Use of amplidyne in control – Amplidyne for control of voltage – Amplidyne for control of current. Unit – V: Industrial Timing Circuits. Introduction – Constituents of Industrial timing circuits – classification of timers – Thermal timers – Electro mechanical timers – Electronic timers – Classification of electronic timers – RC timing elements – Time base generators – SCR delay timer – IC electronic timer. Books for Study: 1. Industrial Electronics – G.K. Mithal – Khanna Publishers – Delhi – 15 th edition – 1992. 2. Electrical Technology – H. Cotton – CBS Publishers – Delhi. Books for References: 1. Electrical Technology – B.L. Theraja, A.K. Theraja – NIRJA construction and Development Co(p) Ltd.