Minewolf Tiller Test and Evaluation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Minewolf Opening up Roads in Sudan
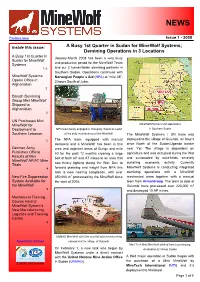
NEWS 01 / 06 Inside this issue: MineWolf opening up roads in Sudan Sudan MineWolf opening up roads in Sudan 1 Croatia MKA*DemING MineWolf team clears almost 1,400,000 m² in 2005 2 Airfield Task in Yei Bosnia & Herzegovina MineWolf supporting NPA to implement TAP Five AT mines detonated, nine AT mines As with previous tasks, MineWolf set up a in Brcko 3 milled into pieces and more than ten AP fully independent field camp was set up in mines detonated on about 3 km of road. order to ensure the machine was Research & That was the result on opening one of the operational for the maximum time each day. Development Mini MineWolf completes most important transport lines from MineWolf Systems’ Uganda into South Sudan. product range 4 Based on last years excellent results the Coming up next 4 NPA MineWolf team was called to open up the Yei-Juba road in Sudan. With Juba becoming the new capital of South Sudan, it is of great importance that it is opened for safe passage in order to distribute food and MineWolf in the field camp to build up infrastructure and enable local The MineWolf tiller design gave trade. The dangerous area was located on unprecedented results when used against the old demarcation line between the both AP and AT-mines. The machine Government of Sudan (GOS) forces, and the successfully withstood several M 15 and Sudan People Liberations Army (SPLA) and TM 57 AT mines but also reliably destroyed AP mines, like the No. 4, M 14 and was heavily mined from both sides. -

Mine Clearance with the Minewolf Machine in Sudan
Journal of Conventional Weapons Destruction Volume 10 Issue 1 The Journal of Mine Action Article 24 August 2006 Picking the Right Tool for the Right Task: Mine Clearance with the MineWolf Machine in Sudan Christoph Frehsee MineWolf Systems AG Follow this and additional works at: https://commons.lib.jmu.edu/cisr-journal Part of the Defense and Security Studies Commons, Emergency and Disaster Management Commons, Other Public Affairs, Public Policy and Public Administration Commons, and the Peace and Conflict Studies Commons Recommended Citation Frehsee, Christoph (2006) "Picking the Right Tool for the Right Task: Mine Clearance with the MineWolf Machine in Sudan," Journal of Mine Action : Vol. 10 : Iss. 1 , Article 24. Available at: https://commons.lib.jmu.edu/cisr-journal/vol10/iss1/24 This Article is brought to you for free and open access by the Center for International Stabilization and Recovery at JMU Scholarly Commons. It has been accepted for inclusion in Journal of Conventional Weapons Destruction by an authorized editor of JMU Scholarly Commons. For more information, please contact [email protected]. Frehsee: Picking the Right Tool for the Right Task: Mine Clearance with the MineWolf Machine in Sudan the IMATC to become humanitarian its national regeneration plan and assign es- to build a mine-detection dog training deminers and EOD technicians respective- sential funding and personnel. facility on the grounds of the IMATC. Picking the Right Tool for the Right Task: ly, was funded by the British government’s At present, MAT Chief Technical Advisor A continued partnership with Securatec, Department for International Development in Uganda Danny Danenbergsons is assist- a German-owned commercial dog-training Mine Clearance with the MineWolf and the U.K. -
Minewolf News Issue 1 2008
NEWS Previous issue Issue 1 - 2008 Inside this issue: A Busy 1st Quarter in Sudan for MineWolf Systems; Demining Operations in 3 Locations A Busy 1st Quarter in January-March 2008 has been a very busy Sudan for MineWolf and productive period for the MineWolf Team Systems 1-2 and our 3 humanitarian demining partners in Southern Sudan. Operations continued with MineWolf Systems Norwegian People´s Aid (NPA) at “mile 38”, Opens Office in 2 hours South of Juba. Afghanistan 2 Danish Demining Group Mini MineWolf Shipped to Afghanistan 3 UN Purchases Mini MineWolf Partners and Operations MineWolf for Deployment to NPA team busily engaged in changing chisels as a part in Southern Sudan Southern Lebanon of the daily maintenance of the MineWolf The MineWolf Systems / UN team was 3 The NPA team, equipped with manual deployed to the village of Gulumbi, an hour’s deminers and a MineWolf has been in this drive North of the Sudan/Uganda border German Army area and adjacent areas of Bungu and mile near Yei. The village is dependent on Publishes Official 40 for the past 12 months clearing a large agriculture and was occupied during the War Results of Mini belt of both AP and AT mines in an area that and surrounded by minefields, severely MineWolf AP/AT Mine saw heavy fighting during the War. Due to curtailing economic activity. Currently Trials 4 forward planning and insight from NPA this MineWolf Systems is conducting integrated task is now nearing completion, with over demining operations with a MineWolf New Fire Suppression 350,000 m2 processed by the MineWolf since mechanical team together with a manual System Available for the start of 2008. -

Mine Action Portfolio 2009 (© Werner Anderson) Ali Farfour, Libanon 2007 Front Page: I Donation Information E-Mail: Telefax: Telephone: Storgt
MINE ACTION Portfolio 2009 MINE ACTION Norwegian People’s Aid (NPA) is a 70 year old humanitarian organisation rooted in the Nor- wegian Labour Movement. We support people in their struggle for more power and influence over their own lives and in the development of their societies. Since 1992, NPA has been one of the lead NGOs in the field of humanitarian mine action, with programmes in 23 countries worldwide. Currently active in 16 affected countries, NPA continues to be a major contributor to terminating the global problem of Explosive Remnants of War (ERW), spending more than USD 30 mill annually on ERW preventive programmes. We played a significant role in the process that led to the signing of the Mine Ban Treaty in 1997 by projecting our empirical experiences from our fieldwork into our political involvement in the ICBL. We applied the same strategic approach on the initiative that led to the recent signing of the Convention on Cluster Munitions in Oslo, December 2008, where NPA played a crucial role in the process. 2009 is a monumental year for all of us who have fielded our energy into the struggle against the scourge of Anti Personnel (AP) landmines and ERW. Monumental because the new con- vention that will come into effect this year will effectively eliminate the threat from both the billions of cluster bombs currently placed in storage all over the world, as well as those tens Norwegian People`s Aid of millions currently taking innocent lives in many affected countries today. Mine Action Department Storgt. 33 A, Oslo, Norway -

A Guide to Road Clearance
James Madison University JMU Scholarly Commons Center for International Stabilization and Global CWD Repository Recovery 7-2008 A Guide to Road Clearance Geneva International Centre for Humanitarian Demining GICHD Follow this and additional works at: https://commons.lib.jmu.edu/cisr-globalcwd Part of the Defense and Security Studies Commons, Peace and Conflict Studies Commons, Public Policy Commons, and the Social Policy Commons Recommended Citation Humanitarian Demining, Geneva International Centre for, "A Guide to Road Clearance" (2008). Global CWD Repository. 1344. https://commons.lib.jmu.edu/cisr-globalcwd/1344 This Other is brought to you for free and open access by the Center for International Stabilization and Recovery at JMU Scholarly Commons. It has been accepted for inclusion in Global CWD Repository by an authorized administrator of JMU Scholarly Commons. For more information, please contact [email protected]. A Guide to Road Clearance The Geneva International Centre for Humanitarian Demining (GICHD) works for the elimination of anti-personnel mines and for the reduction of the humanitarian impact of other landmines and explosive remnants of war. To this end, the GICHD, in partnership with others, provides operational assistance, creates and disseminates knowledge, improves quality management and standards, and supports instruments of international law, all aimed at increasing the performance and professionalism of mine action. A Guide to Road Clearance, First Edition, GICHD, Geneva, July 2008. ISBN 2-940369-11-9 Acknowledgements -
Minewolf Flail and Tiller Machines: Testing the Differences Between Two Demining Technologies
Journal of Conventional Weapons Destruction Volume 10 Issue 2 The Journal of Mine Action Article 48 November 2006 MineWolf Flail and Tiller Machines: Testing the Differences between two Demining Technologies Heinz Rath MineWolf Systems GmbH Dieter Schröder MineWolf Systems GmbH Follow this and additional works at: https://commons.lib.jmu.edu/cisr-journal Part of the Defense and Security Studies Commons, Emergency and Disaster Management Commons, Other Public Affairs, Public Policy and Public Administration Commons, and the Peace and Conflict Studies Commons Recommended Citation Rath, Heinz and Schröder, Dieter (2006) "MineWolf Flail and Tiller Machines: Testing the Differences between two Demining Technologies," Journal of Mine Action : Vol. 10 : Iss. 2 , Article 48. Available at: https://commons.lib.jmu.edu/cisr-journal/vol10/iss2/48 This Article is brought to you for free and open access by the Center for International Stabilization and Recovery at JMU Scholarly Commons. It has been accepted for inclusion in Journal of Conventional Weapons Destruction by an authorized editor of JMU Scholarly Commons. For more information, please contact [email protected]. Rath and Schröder: MineWolf Flail and Tiller Machines: Testing the Differences between two Demining Technologies a small machine. Whether larger machines Soil type was the primary factor deter- could throw mines even greater distances mining throw patterns. Mine size and depth MineWolf Flail and Tiller Machines: than the maximum seen here of 65 metres were relatively unimportant. The depth set- remains to be tested, as throw distance is ting of the flail is likely to affect some val- Testing the Differences between a function of length of chain, design of ues in the data, but the overall trends found chain head, speed of rotation, and amount for mine size and depth should be similar. -

NPA Mine Action Sudan Q Report
NPA Mine Action Sudan – Second Quarter 2008 – 01 April to 30 June Dated 15 July 2008 Introduction During the Second Quarter (Q2) NPA Mine Action Sudan maintained operations in the three states of Western and Central Equatoria and Jonglei. Although the security setting has Jonglei fluctuated across the region - with specific reference to Abyei - and in the above three Western states, team deployments were adjusted where Equatoria necessary and productivity has been Central maintained. A number of task handovers took Equatoria place in Central Equatoria – they are covered below. Area of Operations 2008 Stakeholders Mike Rashid of the South Sudan Demining Commission (SSDC) Equatoria regional office attended a GIS-IMSMA training package at Logobero Camp in April. Other SSDC staff have been attached to the programme in other capacities. The programme received a number of visitors during the reporting period including Mr Petter Eide - Secretary General of NPA; Ms Carola Baller – First Secretary Netherlands Embassy; Mr Jan Ledang – Consul General and Mrs Nina Enger – Consul both from the Norwegian Consulate. In addition, Mr Darvin Lisica, Programme Manager Moses Bidhali – Supervisor Mechanical briefs NPA NPA Bosnia Herzegovina and Ms Vanja Sikirica, Secretary General at SS 548 Lora Health Centre Deputy PM Croatia conducted a successful and productive internal NPA Monitoring Mission. Operational deployment and productivity The graphs right and below describe the 500000 productivity during Q2 as against previous reporting periods. Q2 mechanical productivity 400000 has exceeded 400,000m2 which is very 300000 positive. Meanwhile the manual productivity 2007 has not been as strong; there are a number of 200000 reasons for this: i. -

Minewolf Systems Newsletter, Issue 2, 2008
NEWS Previous issue Issue 2 - 2008 Chilean Army Procures MineWolf Large-scale Mine Inside this issue: Clearance Systems to Clear Minefields along its Borders Chilean Army Procures MineWolfs The Chilean Army has “After a lengthy for Border Clearance 1 acquired two MineWolf evaluation process, large-scale mechanical mine we decided to UAE Land Forces Purchase two clearance machines with purchase systems MineWolfs support equipment to be used for demining with a proven track 2 projects along its remote high-altitude record of mine BACTEC Mini borders with Argentina, Peru and Bolivia. clearance in MineWolf Training Some of the minefields are at altitudes difficult terrain, as and Accreditation in Lebanon exceeding 5,000 meters. The terrain is well as repairability 3 characterized by sand, lava, and rocky soil. in the field. We Mini MineWolf also based our Training in decision on the Afghanistan: vendor’s ability to Accreditation Chile has an estimated Achieved by DDG support our 293 minefields along its borders containing one operations with the 1 3 million mines necessary MineWolf Systems hardware, expertise, and in-country Opens Office in Lebanon support. MineWolf Systems clearly fulfills these criteria.” said Col. Martin Borck Keim, 4 Tembo Quemado, Chile: large area Executive Secretary, Chilean National Air Mobility Trial with 2 minefields, over 1 million m with AT and AP Commission for Demining. Mini MineWolf mines, elevation 4700 meters. Completed During Augusto Pinochet’s dictatorship of 5 The Chilean government has been tackling 1973-1983, approximately one million MineWolf Systems at its landmine problem starting around 2002 mines were laid as a defensive measure. -

Mechanical Demining Equipment Catalogue 2010, GICHD, Geneva, January 2010
Mechanical Demining Equipment Catalogue 2010 The Geneva International Centre for Humanitarian Demining (GICHD) strives for a world free of anti-personnel mines and from the threat of other landmines and explosive remnants of war, and where the suffering and concerns of populations living in affected areas are addressed. The Centre is active in research, provides operational assistance and supports the implementation of the Anti-Personnel Mine Ban Convention. Mechanical Demining Equipment Catalogue 2010, GICHD, Geneva, January 2010. ISBN 2-940369 -33-X. © Geneva International Centre for Humanitarian Demining The description of the machines in this catalogue are those of the manufacturers. Test results mentioned in this catalogue are extracts or quotations of test reports provided either by the manufacturers or published at the International Test and Evaluation Programme (ITEP) website www.itep.ws. The sources are given. They do not necessarily represent the views of the Geneva International Centre for Humanitarian Demining, or the Government of Germany. The views expressed in this publication are otherwise those of the Geneva International Centre for Humanitarian Demining and do not necessarily represent those of the Government of Germany. The designations employed and the presentation of the material in this publication do not imply the expression of any opinion whatsoever on the part of UNMAS, the Government of Germany, or the Geneva International Centre for Humanitarian Demining concerning the legal status of any country, territory or area, or of its authorities or armed groups, or concerning the delimitation of its frontiers and boundaries. Further information on equipment testing is also available on www.gichd.org. -

UXB International Uses the Mini Minewolf in Afghanistan by Chris Thompson, Mechanical Demining Manager, UXB International, Bagram Airforce Base, Afghanistan
News Issue 3 – 2010 Inside this issue: MineWolf Systems operational MineWolf Systems in Northern Sudan operational in Northern In June MineWolf Systems were given a new Systems has the mechanical asset and me- Sudan 1 twelve month contract to operate and main- chanical operating team on the ground. The tain the UN MineWolf in the North of Sudan. team is working well together. It is the first MineWolf machines After five years of operating in Southern time TDI has worked with a MineWolf and aid Border Security in Sudan, this is the first time a MineWolf ma- following their accreditation in early July, the Tajikistan 1 chine has worked in the North. The contract grouping is now operational. links MineWolf Systems and The Develop- “We have been looking forward to an op- Mini MineWolf demonstrates ment Initiative (TDI) as contract partners. TDI portunity to work with and get some hands productivity in Cyprus 2 is managing the contract and supplying the on experience of the MineWolf solutions and manual and medical support whilst Minewolf although it’s early days we are thrilled with the professionalism of the team, the service UXB International support offered and the machine itself” said uses the Mini MineWolf Hugh Morris, Director of TDI. in Afghanistan 3 The machine is working initially in Hamash Korieb in Kassala State. It will remain there Updates from the Balkans 4 for the next 3 months until about October when the rains will be coming to an end and then it will move to operations in Blue Nile NPA continues to use State based out of the TDI HQ there in Ad their Mini MineWolf to assist Damazin. -

Minewolf Systems News, Issue 1, 2007
NEWS Issue 1 - 2007 Inside this issue: Latest CROMAC Test Demonstrates Robust Latest CROMAC Test Capabilities of the Mini MineWolf Demonstrates Robust The Croatian Mine Capabilities of the Mini MineWolf Action Centre 1 (CROMAC) Centre for Testing, MineWolf Arrives in Development and Training has released Wau, Sudan 2 its latest results of rigorous testing of the remote-controlled, tiller-based "Mini MineWolf" from MineWolf Systems AG. NPA’s Mini MineWolf Supports Operations Mini MineWolf on top soil lane in Bosnia- Herzegovina: Update The mandatory test was carried out at the • Machine endurance during repeated 3 Cerovac test site for demining machines antipersonnel (AP) mine activation near Karlovac, Croatia, resulting in full • Efficiency and effectiveness of the MineWolf Systems accreditation of the machine. remote control device Debuts at IDEX 2007 in Abu Dhabi, UAE • Performance of the machine in 4 The machine achieved excellent results in mine-suspected areas and in clearance depth, survivability and AP different types of soil, terrain, MineWolf Passes mine clearance gradients (horizontal and vertical EMC Testing 4 slope), as well as for vegetation clearing Opening of MineWolf • Necessary machine logistics, Systems East Africa servicing and maintenance 5 requirements MineWolf Systems to AP mines PMA-1A and PROM-1 prepared for testing Demonstrate of the Mini MineWolf The Mini MineWolf achieved all goals, Machines at Sibenik 6 The goals of the test were to determine: activating all 19 AP / Fragmentation mines in the test with no significant damage to • General technical characteristics of the machine and of the working either the machine or the working tool. Furthermore, a minimum 20cm ground tool clearance was demonstrated, and the • Soil processing depth for different machine proved itself able to manoeuvre types of soil and the speed of Newsletter archive around buildings, trenches, trees, steep motion of the machine gradients, and in dense vegetation. -

Mise En Page 1
Mechanical Demining Equipment Catalogue 2010 The Geneva International Centre for Humanitarian Demining (GICHD) strives for a world free of anti-personnel mines and from the threat of other landmines and explosive remnants of war, and where the suffering and concerns of populations living in affected areas are addressed. The Centre is active in research, provides operational assistance and supports the implementation of the Anti-Personnel Mine Ban Convention. Mechanical Demining Equipment Catalogue 2010, GICHD, Geneva, January 2010. ISBN 2-940369 -33-X. © Geneva International Centre for Humanitarian Demining The description of the machines in this catalogue are those of the manufacturers. Test results mentioned in this catalogue are extracts or quotations of test reports provided either by the manufacturers or published at the International Test and Evaluation Programme (ITEP) website www.itep.ws. The sources are given. They do not necessarily represent the views of the Geneva International Centre for Humanitarian Demining, or the Government of Germany. The views expressed in this publication are otherwise those of the Geneva International Centre for Humanitarian Demining and do not necessarily represent those of the Government of Germany. The designations employed and the presentation of the material in this publication do not imply the expression of any opinion whatsoever on the part of UNMAS, the Government of Germany, or the Geneva International Centre for Humanitarian Demining concerning the legal status of any country, territory or area, or of its authorities or armed groups, or concerning the delimitation of its frontiers and boundaries. Further information on equipment testing is also available on www.gichd.org.