Conformal Mapping, Convexity and Total Absolute Curvature
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Geometry of Curves
Appendix A Geometry of Curves “Arc, amplitude, and curvature sustain a similar relation to each other as time, motion and velocity, or as volume, mass and density.” Carl Friedrich Gauss The rest of this lecture notes is about geometry of curves and surfaces in R2 and R3. It will not be covered during lectures in MATH 4033 and is not essential to the course. However, it is recommended for readers who want to acquire workable knowledge on Differential Geometry. A.1. Curvature and Torsion A.1.1. Regular Curves. A curve in the Euclidean space Rn is regarded as a function r(t) from an interval I to Rn. The interval I can be finite, infinite, open, closed n n or half-open. Denote the coordinates of R by (x1, x2, ... , xn), then a curve r(t) in R can be written in coordinate form as: r(t) = (x1(t), x2(t),..., xn(t)). One easy way to make sense of a curve is to regard it as the trajectory of a particle. At any time t, the functions x1(t), x2(t), ... , xn(t) give the coordinates of the particle in n R . Assuming all xi(t), where 1 ≤ i ≤ n, are at least twice differentiable, then the first derivative r0(t) represents the velocity of the particle, its magnitude jr0(t)j is the speed of the particle, and the second derivative r00(t) represents the acceleration of the particle. As a course on Differential Manifolds/Geometry, we will mostly study those curves which are infinitely differentiable (i.e. -

J.M. Sullivan, TU Berlin A: Curves Diff Geom I, SS 2019 This Course Is an Introduction to the Geometry of Smooth Curves and Surf
J.M. Sullivan, TU Berlin A: Curves Diff Geom I, SS 2019 This course is an introduction to the geometry of smooth if the velocity never vanishes). Then the speed is a (smooth) curves and surfaces in Euclidean space Rn (in particular for positive function of t. (The cusped curve β above is not regular n = 2; 3). The local shape of a curve or surface is described at t = 0; the other examples given are regular.) in terms of its curvatures. Many of the big theorems in the DE The lengthR [ : Länge] of a smooth curve α is defined as subject – such as the Gauss–Bonnet theorem, a highlight at the j j len(α) = I α˙(t) dt. (For a closed curve, of course, we should end of the semester – deal with integrals of curvature. Some integrate from 0 to T instead of over the whole real line.) For of these integrals are topological constants, unchanged under any subinterval [a; b] ⊂ I, we see that deformation of the original curve or surface. Z b Z b We will usually describe particular curves and surfaces jα˙(t)j dt ≥ α˙(t) dt = α(b) − α(a) : locally via parametrizations, rather than, say, as level sets. a a Whereas in algebraic geometry, the unit circle is typically be described as the level set x2 + y2 = 1, we might instead This simply means that the length of any curve is at least the parametrize it as (cos t; sin t). straight-line distance between its endpoints. Of course, by Euclidean space [DE: euklidischer Raum] The length of an arbitrary curve can be defined (following n we mean the vector space R 3 x = (x1;:::; xn), equipped Jordan) as its total variation: with with the standard inner product or scalar product [DE: P Xn Skalarproduktp ] ha; bi = a · b := aibi and its associated norm len(α):= TV(α):= sup α(ti) − α(ti−1) : jaj := ha; ai. -

The Riemann Mapping Theorem Christopher J. Bishop
The Riemann Mapping Theorem Christopher J. Bishop C.J. Bishop, Mathematics Department, SUNY at Stony Brook, Stony Brook, NY 11794-3651 E-mail address: [email protected] 1991 Mathematics Subject Classification. Primary: 30C35, Secondary: 30C85, 30C62 Key words and phrases. numerical conformal mappings, Schwarz-Christoffel formula, hyperbolic 3-manifolds, Sullivan’s theorem, convex hulls, quasiconformal mappings, quasisymmetric mappings, medial axis, CRDT algorithm The author is partially supported by NSF Grant DMS 04-05578. Abstract. These are informal notes based on lectures I am giving in MAT 626 (Topics in Complex Analysis: the Riemann mapping theorem) during Fall 2008 at Stony Brook. We will start with brief introduction to conformal mapping focusing on the Schwarz-Christoffel formula and how to compute the unknown parameters. In later chapters we will fill in some of the details of results and proofs in geometric function theory and survey various numerical methods for computing conformal maps, including a method of my own using ideas from hyperbolic and computational geometry. Contents Chapter 1. Introduction to conformal mapping 1 1. Conformal and holomorphic maps 1 2. M¨obius transformations 16 3. The Schwarz-Christoffel Formula 20 4. Crowding 27 5. Power series of Schwarz-Christoffel maps 29 6. Harmonic measure and Brownian motion 39 7. The quasiconformal distance between polygons 48 8. Schwarz-Christoffel iterations and Davis’s method 56 Chapter 2. The Riemann mapping theorem 67 1. The hyperbolic metric 67 2. Schwarz’s lemma 69 3. The Poisson integral formula 71 4. A proof of Riemann’s theorem 73 5. Koebe’s method 74 6. -

Geodetic Position Computations
GEODETIC POSITION COMPUTATIONS E. J. KRAKIWSKY D. B. THOMSON February 1974 TECHNICALLECTURE NOTES REPORT NO.NO. 21739 PREFACE In order to make our extensive series of lecture notes more readily available, we have scanned the old master copies and produced electronic versions in Portable Document Format. The quality of the images varies depending on the quality of the originals. The images have not been converted to searchable text. GEODETIC POSITION COMPUTATIONS E.J. Krakiwsky D.B. Thomson Department of Geodesy and Geomatics Engineering University of New Brunswick P.O. Box 4400 Fredericton. N .B. Canada E3B5A3 February 197 4 Latest Reprinting December 1995 PREFACE The purpose of these notes is to give the theory and use of some methods of computing the geodetic positions of points on a reference ellipsoid and on the terrain. Justification for the first three sections o{ these lecture notes, which are concerned with the classical problem of "cCDputation of geodetic positions on the surface of an ellipsoid" is not easy to come by. It can onl.y be stated that the attempt has been to produce a self contained package , cont8.i.ning the complete development of same representative methods that exist in the literature. The last section is an introduction to three dimensional computation methods , and is offered as an alternative to the classical approach. Several problems, and their respective solutions, are presented. The approach t~en herein is to perform complete derivations, thus stqing awrq f'rcm the practice of giving a list of for11111lae to use in the solution of' a problem. -

Riemannian Submanifolds: a Survey
RIEMANNIAN SUBMANIFOLDS: A SURVEY BANG-YEN CHEN Contents Chapter 1. Introduction .............................. ...................6 Chapter 2. Nash’s embedding theorem and some related results .........9 2.1. Cartan-Janet’s theorem .......................... ...............10 2.2. Nash’s embedding theorem ......................... .............11 2.3. Isometric immersions with the smallest possible codimension . 8 2.4. Isometric immersions with prescribed Gaussian or Gauss-Kronecker curvature .......................................... ..................12 2.5. Isometric immersions with prescribed mean curvature. ...........13 Chapter 3. Fundamental theorems, basic notions and results ...........14 3.1. Fundamental equations ........................... ..............14 3.2. Fundamental theorems ............................ ..............15 3.3. Basic notions ................................... ................16 3.4. A general inequality ............................. ...............17 3.5. Product immersions .............................. .............. 19 3.6. A relationship between k-Ricci tensor and shape operator . 20 3.7. Completeness of curvature surfaces . ..............22 Chapter 4. Rigidity and reduction theorems . ..............24 4.1. Rigidity ....................................... .................24 4.2. A reduction theorem .............................. ..............25 Chapter 5. Minimal submanifolds ....................... ...............26 arXiv:1307.1875v1 [math.DG] 7 Jul 2013 5.1. First and second variational formulas -
Design Data 21
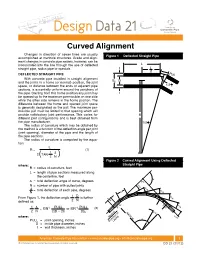
Design Data 21 Curved Alignment Changes in direction of sewer lines are usually Figure 1 Deflected Straight Pipe accomplished at manhole structures. Grade and align- Figure 1 Deflected Straight Pipe ment changes in concrete pipe sewers, however, can be incorporated into the line through the use of deflected L straight pipe, radius pipe or specials. t L 2 DEFLECTED STRAIGHT PIPE Pull With concrete pipe installed in straight alignment Bc D and the joints in a home (or normal) position, the joint ∆ space, or distance between the ends of adjacent pipe 1/2 N sections, is essentially uniform around the periphery of the pipe. Starting from this home position any joint may t be opened up to the maximum permissible on one side while the other side remains in the home position. The difference between the home and opened joint space is generally designated as the pull. The maximum per- missible pull must be limited to that opening which will provide satisfactory joint performance. This varies for R different joint configurations and is best obtained from the pipe manufacturer. ∆ 1/2 N The radius of curvature which may be obtained by this method is a function of the deflection angle per joint (joint opening), diameter of the pipe and the length of the pipe sections. The radius of curvature is computed by the equa- tion: L R = (1) 1 ∆ 2 TAN ( 2 N ) Figure 2 Curved Alignment Using Deflected Figure 2 Curved Alignment Using Deflected where: Straight Pipe R = radius of curvature, feet Straight Pipe L = length of pipe sections measured along the centerline, feet ∆ ∆ = total deflection angle of curve, degrees P.I. -

The Chazy XII Equation and Schwarz Triangle Functions
Symmetry, Integrability and Geometry: Methods and Applications SIGMA 13 (2017), 095, 24 pages The Chazy XII Equation and Schwarz Triangle Functions Oksana BIHUN and Sarbarish CHAKRAVARTY Department of Mathematics, University of Colorado, Colorado Springs, CO 80918, USA E-mail: [email protected], [email protected] Received June 21, 2017, in final form December 12, 2017; Published online December 25, 2017 https://doi.org/10.3842/SIGMA.2017.095 Abstract. Dubrovin [Lecture Notes in Math., Vol. 1620, Springer, Berlin, 1996, 120{348] showed that the Chazy XII equation y000 − 2yy00 + 3y02 = K(6y0 − y2)2, K 2 C, is equivalent to a projective-invariant equation for an affine connection on a one-dimensional complex manifold with projective structure. By exploiting this geometric connection it is shown that the Chazy XII solution, for certain values of K, can be expressed as y = a1w1 +a2w2 +a3w3 where wi solve the generalized Darboux{Halphen system. This relationship holds only for certain values of the coefficients (a1; a2; a3) and the Darboux{Halphen parameters (α; β; γ), which are enumerated in Table2. Consequently, the Chazy XII solution y(z) is parametrized by a particular class of Schwarz triangle functions S(α; β; γ; z) which are used to represent the solutions wi of the Darboux{Halphen system. The paper only considers the case where α + β +γ < 1. The associated triangle functions are related among themselves via rational maps that are derived from the classical algebraic transformations of hypergeometric functions. The Chazy XII equation is also shown to be equivalent to a Ramanujan-type differential system for a triple (P;^ Q;^ R^). -

Some Examples of Critical Points for the Total Mean Curvature Functional
Proceedings of the Edinburgh Mathematical Society (2000) 43, 587-603 © SOME EXAMPLES OF CRITICAL POINTS FOR THE TOTAL MEAN CURVATURE FUNCTIONAL JOSU ARROYO1, MANUEL BARROS2 AND OSCAR J. GARAY1 1 Departamento de Matemdticas, Universidad del Pais Vasco/Euskal Herriko Unibertsitatea, Aptdo 644 > 48080 Bilbao, Spain ([email protected]; [email protected]) 2 Departamento de Geometria y Topologia, Facultad de Ciencias, Universidad de Granada, 18071 Granada, Spain ([email protected]) (Received 31 March 1999) Abstract We study the following problem: existence and classification of closed curves which are critical points for the total curvature functional, defined on spaces of curves in a Riemannian manifold. This problem is completely solved in a real space form. Next, we give examples of critical points for this functional in a class of metrics with constant scalar curvature on the three sphere. Also, we obtain a rational one-parameter family of closed helices which are critical points for that functional in CP2(4) when it is endowed with its usual Kaehlerian structure. Finally, we use the principle of symmetric criticality to get equivariant submanifolds, constructed on the above curves, which are critical points for the total mean curvature functional. Keywords: total curvature; critical points; total tension AMS 1991 Mathematics subject classification: Primary 53C40; 53A05 1. Introduction The tension field of a submanifold is the Euler-Lagrange operator associated with the energy of the submanifold [9] and it is precisely the mean curvature vector field. Thus, the amount of tension that a submanifold receives at one point is measured by the mean curvature function at that point, a. -
![Arxiv:1709.02078V1 [Math.DG]](https://docslib.b-cdn.net/cover/7789/arxiv-1709-02078v1-math-dg-1047789.webp)
Arxiv:1709.02078V1 [Math.DG]
DENSITY OF A MINIMAL SUBMANIFOLD AND TOTAL CURVATURE OF ITS BOUNDARY Jaigyoung Choe∗ and Robert Gulliver Abstract Given a piecewise smooth submanifold Γn−1 ⊂ Rm and p ∈ Rm, we define the vision angle Πp(Γ) to be the (n − 1)-dimensional volume of the radial projection of Γ to the unit sphere centered at p. If p is a point on a stationary n-rectifiable set Σ ⊂ Rm with boundary Γ, then we show the density of Σ at p is ≤ the density at its vertex p of the n−1 cone over Γ. It follows that if Πp(Γ) is less than twice the volume of S , for all p ∈ Γ, then Σ is an embedded submanifold. As a consequence, we prove that given two n-planes n n Rm n R1 , R2 in and two compact convex hypersurfaces Γi of Ri ,i =1, 2, a nonflat minimal submanifold spanned by Γ := Γ1 ∪ Γ2 is embedded. 1 Introduction Fenchel [F1] showed that the total curvature of a closed space curve γ ⊂ Rm is at least 2π, and it equals 2π if and only if γ is a plane convex curve. F´ary [Fa] and Milnor [M] independently proved that a simple knotted regular curve has total curvature larger than 4π. These two results indicate that a Jordan curve which is curved at most double the minimum is isotopically simple. But in fact minimal surfaces spanning such Jordan curves must be simple as well. Indeed, Nitsche [N] showed that an analytic Jordan curve in R3 with total curvature at most 4π bounds exactly one minimal disk. -

Radius-Of-Curvature.Pdf
CHAPTER 5 CURVATURE AND RADIUS OF CURVATURE 5.1 Introduction: Curvature is a numerical measure of bending of the curve. At a particular point on the curve , a tangent can be drawn. Let this line makes an angle Ψ with positive x- axis. Then curvature is defined as the magnitude of rate of change of Ψ with respect to the arc length s. Ψ Curvature at P = It is obvious that smaller circle bends more sharply than larger circle and thus smaller circle has a larger curvature. Radius of curvature is the reciprocal of curvature and it is denoted by ρ. 5.2 Radius of curvature of Cartesian curve: ρ = = (When tangent is parallel to x – axis) ρ = (When tangent is parallel to y – axis) Radius of curvature of parametric curve: ρ = , where and – Example 1 Find the radius of curvature at any pt of the cycloid , – Solution: Page | 1 – and Now ρ = = – = = =2 Example 2 Show that the radius of curvature at any point of the curve ( x = a cos3 , y = a sin3 ) is equal to three times the lenth of the perpendicular from the origin to the tangent. Solution : – – – = – 3a [–2 cos + ] 2 3 = 6 a cos sin – 3a cos = Now = – = Page | 2 = – – = – – = = 3a sin …….(1) The equation of the tangent at any point on the curve is 3 3 y – a sin = – tan (x – a cos ) x sin + y cos – a sin cos = 0 ……..(2) The length of the perpendicular from the origin to the tangent (2) is – p = = a sin cos ……..(3) Hence from (1) & (3), = 3p Example 3 If & ' are the radii of curvature at the extremities of two conjugate diameters of the ellipse = 1 prove that Solution: Parametric equation of the ellipse is x = a cos , y=b sin = – a sin , = b cos = – a cos , = – b sin The radius of curvature at any point of the ellipse is given by = = – – – – – Page | 3 = ……(1) For the radius of curvature at the extremity of other conjugate diameter is obtained by replacing by + in (1). -

Curvatures of Smooth and Discrete Surfaces
Curvatures of Smooth and Discrete Surfaces John M. Sullivan Abstract. We discuss notions of Gauss curvature and mean curvature for polyhedral surfaces. The discretizations are guided by the principle of preserving integral relations for curvatures, like the Gauss/Bonnet theorem and the mean-curvature force balance equation. Keywords. Discrete Gauss curvature, discrete mean curvature, integral curvature rela- tions. The curvatures of a smooth surface are local measures of its shape. Here we con- sider analogous quantities for discrete surfaces, meaning triangulated polyhedral surfaces. Often the most useful analogs are those which preserve integral relations for curvature, like the Gauss/Bonnet theorem or the force balance equation for mean curvature. For sim- plicity, we usually restrict our attention to surfaces in euclidean three-space E3, although some of the results generalize to other ambient manifolds of arbitrary dimension. This article is intended as background for some of the related contributions to this volume. Much of the material here is not new; some is even quite old. Although some references are given, no attempt has been made to give a comprehensive bibliography or a full picture of the historical development of the ideas. 1. Smooth curves, framings and integral curvature relations A companion article [Sul08] in this volume investigates curves of finite total curvature. This class includes both smooth and polygonal curves, and allows a unified treatment of curvature. Here we briefly review the theory of smooth curves from the point of view we arXiv:0710.4497v1 [math.DG] 24 Oct 2007 will later adopt for surfaces. The curvatures of a smooth curve γ (which we usually assume is parametrized by its arclength s) are the local properties of its shape, invariant under euclidean motions. -

Conjugacy Classification of Quaternionic M¨Obius Transformations
CONJUGACY CLASSIFICATION OF QUATERNIONIC MOBIUS¨ TRANSFORMATIONS JOHN R. PARKER AND IAN SHORT Abstract. It is well known that the dynamics and conjugacy class of a complex M¨obius transformation can be determined from a simple rational function of the coef- ficients of the transformation. We study the group of quaternionic M¨obius transforma- tions and identify simple rational functions of the coefficients of the transformations that determine dynamics and conjugacy. 1. Introduction The motivation behind this paper is the classical theory of complex M¨obius trans- formations. A complex M¨obiustransformation f is a conformal map of the extended complex plane of the form f(z) = (az + b)(cz + d)−1, where a, b, c and d are complex numbers such that the quantity σ = ad − bc is not zero (we sometimes write σ = σf in order to avoid ambiguity). There is a homomorphism from SL(2, C) to the group a b of complex M¨obiustransformations which takes the matrix ( c d ) to the map f. This homomorphism is surjective because the coefficients of f can always be scaled so that σ = 1. The collection of all complex M¨obius transformations for which σ takes the value 1 forms a group which can be identified with PSL(2, C). A member f of PSL(2, C) is simple if it is conjugate in PSL(2, C) to an element of PSL(2, R). The map f is k–simple if it may be expressed as the composite of k simple transformations but no fewer. Let τ = a + d (and likewise we write τ = τf where necessary).