On the Total Curvature and Betti Numbers of Complex Projective Manifolds
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Betti Numbers of Finite Volume Orbifolds 10
BETTI NUMBERS OF FINITE VOLUME ORBIFOLDS IDDO SAMET Abstract. We prove that the Betti numbers of a negatively curved orbifold are linearly bounded by its volume, generalizing a theorem of Gromov which establishes this bound for manifolds. An imme- diate corollary is that Betti numbers of a lattice in a rank-one Lie group are linearly bounded by its co-volume. 1. Introduction Let X be a Hadamard manifold, i.e. a connected, simply-connected, complete Riemannian manifold of non-positive curvature normalized such that −1 ≤ K ≤ 0. Let Γ be a discrete subgroup of Isom(X). If Γ is torsion-free then X=Γ is a Riemannian manifold. If Γ has torsion elements, then X=Γ has a structure of an orbifold. In both cases, the Riemannian structure defines the volume of X=Γ. An important special case is that of symmetric spaces X = KnG, where G is a connected semisimple Lie group without center and with no compact factors, and K is a maximal compact subgroup. Then X is non-positively curved, and G is the connected component of Isom(X). In this case, X=Γ has finite volume iff Γ is a lattice in G. The curvature of X is non-positive if rank(G) ≥ 2, and is negative if rank(G) = 1. In many cases, the volume of negatively curved manifold controls the complexity of its topology. A manifestation of this phenomenon is the celebrated theorem of Gromov [3, 10] stating that if X has sectional curvature −1 ≤ K < 0 then Xn (1) bi(X=Γ) ≤ Cn · vol(X=Γ); i=0 where bi are Betti numbers w.r.t. -

Cusp and B1 Growth for Ball Quotients and Maps Onto Z with Finitely
Cusp and b1 growth for ball quotients and maps onto Z with finitely generated kernel Matthew Stover∗ Temple University [email protected] August 8, 2018 Abstract 2 Let M = B =Γ be a smooth ball quotient of finite volume with first betti number b1(M) and let E(M) ≥ 0 be the number of cusps (i.e., topological ends) of M. We study the growth rates that are possible in towers of finite-sheeted coverings of M. In particular, b1 and E have little to do with one another, in contrast with the well-understood cases of hyperbolic 2- and 3-manifolds. We also discuss growth of b1 for congruence 2 3 arithmetic lattices acting on B and B . Along the way, we provide an explicit example of a lattice in PU(2; 1) admitting a homomorphism onto Z with finitely generated kernel. Moreover, we show that any cocompact arithmetic lattice Γ ⊂ PU(n; 1) of simplest type contains a finite index subgroup with this property. 1 Introduction Let Bn be the unit ball in Cn with its Bergman metric and Γ be a torsion-free group of isometries acting discretely with finite covolume. Then M = Bn=Γ is a manifold with a finite number E(M) ≥ 0 of cusps. Let b1(M) = dim H1(M; Q) be the first betti number of M. One purpose of this paper is to describe possible behavior of E and b1 in towers of finite-sheeted coverings. Our examples are closely related to the ball quotients constructed by Hirzebruch [25] and Deligne{ Mostow [17, 38]. -

HE WANG Abstract. a Mini-Course on Rational Homotopy Theory
RATIONAL HOMOTOPY THEORY HE WANG Abstract. A mini-course on rational homotopy theory. Contents 1. Introduction 2 2. Elementary homotopy theory 3 3. Spectral sequences 8 4. Postnikov towers and rational homotopy theory 16 5. Commutative differential graded algebras 21 6. Minimal models 25 7. Fundamental groups 34 References 36 2010 Mathematics Subject Classification. Primary 55P62 . 1 2 HE WANG 1. Introduction One of the goals of topology is to classify the topological spaces up to some equiva- lence relations, e.g., homeomorphic equivalence and homotopy equivalence (for algebraic topology). In algebraic topology, most of the time we will restrict to spaces which are homotopy equivalent to CW complexes. We have learned several algebraic invariants such as fundamental groups, homology groups, cohomology groups and cohomology rings. Using these algebraic invariants, we can seperate two non-homotopy equivalent spaces. Another powerful algebraic invariants are the higher homotopy groups. Whitehead the- orem shows that the functor of homotopy theory are power enough to determine when two CW complex are homotopy equivalent. A rational coefficient version of the homotopy theory has its own techniques and advan- tages: 1. fruitful algebraic structures. 2. easy to calculate. RATIONAL HOMOTOPY THEORY 3 2. Elementary homotopy theory 2.1. Higher homotopy groups. Let X be a connected CW-complex with a base point x0. Recall that the fundamental group π1(X; x0) = [(I;@I); (X; x0)] is the set of homotopy classes of maps from pair (I;@I) to (X; x0) with the product defined by composition of paths. Similarly, for each n ≥ 2, the higher homotopy group n n πn(X; x0) = [(I ;@I ); (X; x0)] n n is the set of homotopy classes of maps from pair (I ;@I ) to (X; x0) with the product defined by composition. -

On the Betti Numbers of Real Varieties
ON THE BETTI NUMBERS OF REAL VARIETIES J. MILNOR The object of this note will be to give an upper bound for the sum of the Betti numbers of a real affine algebraic variety. (Added in proof. Similar results have been obtained by R. Thom [lO].) Let F be a variety in the real Cartesian space Rm, defined by poly- nomial equations /i(xi, ■ ■ ■ , xm) = 0, ■ • • , fP(xx, ■ ■ ■ , xm) = 0. The qth Betti number of V will mean the rank of the Cech cohomology group Hq(V), using coefficients in some fixed field F. Theorem 2. If each polynomial f, has degree S k, then the sum of the Betti numbers of V is ^k(2k —l)m-1. Analogous statements for complex and/or projective varieties will be given at the end. I wish to thank W. May for suggesting this problem to me. Remark A. This is certainly not a best possible estimate. (Compare Remark B.) In the examples which I know, the sum of the Betti numbers of V is always 5=km. Consider for example the m polynomials fi(xx, ■ ■ ■ , xm) = (xi - l)(xi - 2) • • • (xi - k), where i=l, 2, • ■ • , m. These define a zero-dimensional variety, con- sisting of precisely km points. The proofs of Theorem 2 and of Theorem 1 (which will be stated later) depend on the following. Lemma 1. Let V~oERm be a zero-dimensional variety defined by poly- nomial equations fx = 0, ■ • • , fm = 0. Suppose that the gradient vectors dfx, • • • , dfm are linearly independent at each point of Vo- Then the number of points in V0 is at most equal to the product (deg fi) (deg f2) ■ ■ ■ (deg/m). -

An Introduction to Complex Algebraic Geometry with Emphasis on The
AN INTRODUCTION TO COMPLEX ALGEBRAIC GEOMETRY WITH EMPHASIS ON THE THEORY OF SURFACES By Chris Peters Mathematisch Instituut der Rijksuniversiteit Leiden and Institut Fourier Grenoble i Preface These notes are based on courses given in the fall of 1992 at the University of Leiden and in the spring of 1993 at the University of Grenoble. These courses were meant to elucidate the Mori point of view on classification theory of algebraic surfaces as briefly alluded to in [P]. The material presented here consists of a more or less self-contained advanced course in complex algebraic geometry presupposing only some familiarity with the theory of algebraic curves or Riemann surfaces. But the goal, as in the lectures, is to understand the Enriques classification of surfaces from the point of view of Mori-theory. In my opininion any serious student in algebraic geometry should be acquainted as soon as possible with the yoga of coherent sheaves and so, after recalling the basic concepts in algebraic geometry, I have treated sheaves and their cohomology theory. This part culminated in Serre’s theorems about coherent sheaves on projective space. Having mastered these tools, the student can really start with surface theory, in particular with intersection theory of divisors on surfaces. The treatment given is algebraic, but the relation with the topological intersection theory is commented on briefly. A fuller discussion can be found in Appendix 2. Intersection theory then is applied immediately to rational surfaces. A basic tool from the modern point of view is Mori’s rationality theorem. The treatment for surfaces is elementary and I borrowed it from [Wi]. -
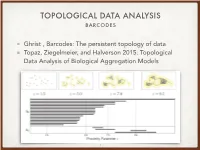
Topological Data Analysis of Biological Aggregation Models
TOPOLOGICAL DATA ANALYSIS BARCODES Ghrist , Barcodes: The persistent topology of data Topaz, Ziegelmeier, and Halverson 2015: Topological Data Analysis of Biological Aggregation Models 1 Questions in data analysis: • How to infer high dimensional structure from low dimensional representations? • How to assemble discrete points into global structures? 2 Themes in topological data analysis1 : 1. Replace a set of data points with a family of simplicial complexes, indexed by a proximity parameter. 2. View these topological complexes using the novel theory of persistent homology. 3. Encode the persistent homology of a data set as a parameterized version of a Betti number (a barcode). 1Work of Carlsson, de Silva, Edelsbrunner, Harer, Zomorodian 3 CLOUDS OF DATA Point cloud data coming from physical objects in 3-d 4 CLOUDS TO COMPLEXES Cech Rips complex complex 5 CHOICE OF PARAMETER ✏ ? USE PERSISTENT HOMOLOGY APPLICATION (TOPAZ ET AL.): BIOLOGICAL AGGREGATION MODELS Use two math models of biological aggregation (bird flocks, fish schools, etc.): Vicsek et al., D’Orsogna et al. Generate point clouds in position-velocity space at different times. Analyze the topological structure of these point clouds by calculating the first few Betti numbers. Visualize of Betti numbers using contours plots. Compare results to other measures/parameters used to quantify global behavior of aggregations. TDA AND PERSISTENT HOMOLOGY FORMING A SIMPLICIAL COMPLEX k-simplices • 1-simplex (edge): 2 points are within ✏ of each other. • 2-simplex (triangle): 3 points are pairwise within ✏ from each other EXAMPLE OF A VIETORIS-RIPS COMPLEX HOMOLOGY BOUNDARIES For k 0, create an abstract vector space C with basis consisting of the ≥ k set of k-simplices in S✏. -

J.M. Sullivan, TU Berlin A: Curves Diff Geom I, SS 2019 This Course Is an Introduction to the Geometry of Smooth Curves and Surf
J.M. Sullivan, TU Berlin A: Curves Diff Geom I, SS 2019 This course is an introduction to the geometry of smooth if the velocity never vanishes). Then the speed is a (smooth) curves and surfaces in Euclidean space Rn (in particular for positive function of t. (The cusped curve β above is not regular n = 2; 3). The local shape of a curve or surface is described at t = 0; the other examples given are regular.) in terms of its curvatures. Many of the big theorems in the DE The lengthR [ : Länge] of a smooth curve α is defined as subject – such as the Gauss–Bonnet theorem, a highlight at the j j len(α) = I α˙(t) dt. (For a closed curve, of course, we should end of the semester – deal with integrals of curvature. Some integrate from 0 to T instead of over the whole real line.) For of these integrals are topological constants, unchanged under any subinterval [a; b] ⊂ I, we see that deformation of the original curve or surface. Z b Z b We will usually describe particular curves and surfaces jα˙(t)j dt ≥ α˙(t) dt = α(b) − α(a) : locally via parametrizations, rather than, say, as level sets. a a Whereas in algebraic geometry, the unit circle is typically be described as the level set x2 + y2 = 1, we might instead This simply means that the length of any curve is at least the parametrize it as (cos t; sin t). straight-line distance between its endpoints. Of course, by Euclidean space [DE: euklidischer Raum] The length of an arbitrary curve can be defined (following n we mean the vector space R 3 x = (x1;:::; xn), equipped Jordan) as its total variation: with with the standard inner product or scalar product [DE: P Xn Skalarproduktp ] ha; bi = a · b := aibi and its associated norm len(α):= TV(α):= sup α(ti) − α(ti−1) : jaj := ha; ai. -

Topologically Constrained Segmentation with Topological Maps Alexandre Dupas, Guillaume Damiand
Topologically Constrained Segmentation with Topological Maps Alexandre Dupas, Guillaume Damiand To cite this version: Alexandre Dupas, Guillaume Damiand. Topologically Constrained Segmentation with Topological Maps. Workshop on Computational Topology in Image Context, Jun 2008, Poitiers, France. hal- 01517182 HAL Id: hal-01517182 https://hal.archives-ouvertes.fr/hal-01517182 Submitted on 2 May 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Topologically Constrained Segmentation with Topological Maps Alexandre Dupas1 and Guillaume Damiand2 1 XLIM-SIC, Universit´ede Poitiers, UMR CNRS 6172, Bˆatiment SP2MI, F-86962 Futuroscope Chasseneuil, France [email protected] 2 LaBRI, Universit´ede Bordeaux 1, UMR CNRS 5800, F-33405 Talence, France [email protected] Abstract This paper presents incremental algorithms used to compute Betti numbers with topological maps. Their implementation, as topological criterion for an existing bottom-up segmentation, is explained and results on artificial images are shown to illustrate the process. Keywords: Topological map, Topological constraint, Betti numbers, Segmentation. 1 Introduction In the image processing context, image segmentation is one of the main steps. Currently, most segmentation algorithms take into account color and texture of regions. Some of them also in- troduce geometrical criteria, like taking the shape of the object into account, to achieve a good segmentation. -

Circles in a Complex Projective Space
Adachi, T., Maeda, S. and Udagawa, S. Osaka J. Math. 32 (1995), 709-719 CIRCLES IN A COMPLEX PROJECTIVE SPACE TOSHIAKI ADACHI, SADAHIRO MAEDA AND SEIICHI UDAGAWA (Received February 15, 1994) 0. Introduction The study of circles is one of the interesting objects in differential geometry. A curve γ(s) on a Riemannian manifold M parametrized by its arc length 5 is called a circle, if there exists a field of unit vectors Ys along the curve which satisfies, together with the unit tangent vectors Xs — Ϋ(s)9 the differential equations : FSXS = kYs and FsYs= — kXs, where k is a positive constant, which is called the curvature of the circle γ(s) and Vs denotes the covariant differentiation along γ(s) with respect to the Aiemannian connection V of M. For given a point lEJIί, orthonormal pair of vectors u, v^ TXM and for any given positive constant k, we have a unique circle γ(s) such that γ(0)=x, γ(0) = u and (Psγ(s))s=o=kv. It is known that in a complete Riemannian manifold every circle can be defined for -oo<5<oo (Cf. [6]). The study of global behaviours of circles is very interesting. However there are few results in this direction except for the global existence theorem. In general, a circle in a Riemannian manifold is not closed. Here we call a circle γ(s) closed if = there exists So with 7(so) = /(0), XSo Xo and YSo— Yo. Of course, any circles in Euclidean m-space Em are closed. And also any circles in Euclidean m-sphere Sm(c) are closed. -

NOTES on CARTIER and WEIL DIVISORS Recall: Definition 0.1. A
NOTES ON CARTIER AND WEIL DIVISORS AKHIL MATHEW Abstract. These are notes on divisors from Ravi Vakil's book [2] on scheme theory that I prepared for the Foundations of Algebraic Geometry seminar at Harvard. Most of it is a rewrite of chapter 15 in Vakil's book, and the originality of these notes lies in the mistakes. I learned some of this from [1] though. Recall: Definition 0.1. A line bundle on a ringed space X (e.g. a scheme) is a locally free sheaf of rank one. The group of isomorphism classes of line bundles is called the Picard group and is denoted Pic(X). Here is a standard source of line bundles. 1. The twisting sheaf 1.1. Twisting in general. Let R be a graded ring, R = R0 ⊕ R1 ⊕ ::: . We have discussed the construction of the scheme ProjR. Let us now briefly explain the following additional construction (which will be covered in more detail tomorrow). L Let M = Mn be a graded R-module. Definition 1.1. We define the sheaf Mf on ProjR as follows. On the basic open set D(f) = SpecR(f) ⊂ ProjR, we consider the sheaf associated to the R(f)-module M(f). It can be checked easily that these sheaves glue on D(f) \ D(g) = D(fg) and become a quasi-coherent sheaf Mf on ProjR. Clearly, the association M ! Mf is a functor from graded R-modules to quasi- coherent sheaves on ProjR. (For R reasonable, it is in fact essentially an equiva- lence, though we shall not need this.) We now set a bit of notation. -

Riemannian Submanifolds: a Survey
RIEMANNIAN SUBMANIFOLDS: A SURVEY BANG-YEN CHEN Contents Chapter 1. Introduction .............................. ...................6 Chapter 2. Nash’s embedding theorem and some related results .........9 2.1. Cartan-Janet’s theorem .......................... ...............10 2.2. Nash’s embedding theorem ......................... .............11 2.3. Isometric immersions with the smallest possible codimension . 8 2.4. Isometric immersions with prescribed Gaussian or Gauss-Kronecker curvature .......................................... ..................12 2.5. Isometric immersions with prescribed mean curvature. ...........13 Chapter 3. Fundamental theorems, basic notions and results ...........14 3.1. Fundamental equations ........................... ..............14 3.2. Fundamental theorems ............................ ..............15 3.3. Basic notions ................................... ................16 3.4. A general inequality ............................. ...............17 3.5. Product immersions .............................. .............. 19 3.6. A relationship between k-Ricci tensor and shape operator . 20 3.7. Completeness of curvature surfaces . ..............22 Chapter 4. Rigidity and reduction theorems . ..............24 4.1. Rigidity ....................................... .................24 4.2. A reduction theorem .............................. ..............25 Chapter 5. Minimal submanifolds ....................... ...............26 arXiv:1307.1875v1 [math.DG] 7 Jul 2013 5.1. First and second variational formulas -

Grassmannians Via Projection Operators and Some of Their Special Submanifolds ∗
GRASSMANNIANS VIA PROJECTION OPERATORS AND SOME OF THEIR SPECIAL SUBMANIFOLDS ∗ IVKO DIMITRIC´ Department of Mathematics, Penn State University Fayette, Uniontown, PA 15401-0519, USA E-mail: [email protected] We study submanifolds of a general Grassmann manifold which are of 1-type in a suitably defined Euclidean space of F−Hermitian matrices (such a submanifold is minimal in some hypersphere of that space and, apart from a translation, the im- mersion is built using eigenfunctions from a single eigenspace of the Laplacian). We show that a minimal 1-type hypersurface of a Grassmannian is mass-symmetric and has the type-eigenvalue which is a specific number in each dimension. We derive some conditions on the mean curvature of a 1-type hypersurface of a Grassmannian and show that such a hypersurface with a nonzero constant mean curvature has at most three constant principal curvatures. At the end, we give some estimates of the first nonzero eigenvalue of the Laplacian on a compact submanifold of a Grassmannian. 1. Introduction The Grassmann manifold of k dimensional subspaces of the vector space − Fm over a field F R, C, H can be conveniently defined as the base man- ∈{ } ifold of the principal fibre bundle of the corresponding Stiefel manifold of F unitary frames, where a frame is projected onto the F plane spanned − − by it. As observed already in 1927 by Cartan, all Grassmannians are sym- metric spaces and they have been studied in such context ever since, using the root systems and the Lie algebra techniques. However, the submani- fold geometry in Grassmannians of higher rank is much less developed than the corresponding geometry in rank-1 symmetric spaces, the notable excep- tions being the classification of the maximal totally geodesic submanifolds (the well known results of J.A.