Fidelity Methodology for Tailplane Sizing Bento Silva De Mattos1, Ney Rafael Secco1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Conceptual Design Study of a Hydrogen Powered Ultra Large Cargo Aircraft
Conceptual Design Study of a Hydrogen Powered Ultra Large Cargo Aircraft R.A.J. Jansen University of Technology Technology of University Delft Delft Conceptual Design Study of a Hydrogen Powered Ultra Large Cargo Aircraft Towards a competitive and sustainable alternative of maritime transport by R.A.J. Jansen to obtain the degree of Master of Science at the Delft University of Technology, to be defended publicly on Tuesday January 10, 2017 at 9:00 AM. Student number: 4036093 Thesis registration: 109#17#MT#FPP Project duration: January 11, 2016 – January 10, 2017 Thesis committee: Dr. ir. G. La Rocca, TU Delft, supervisor Dr. A. Gangoli Rao, TU Delft Dr. ir. H. G. Visser, TU Delft An electronic version of this thesis is available at http://repository.tudelft.nl/. Acknowledgements This report presents the research performed to complete the master track Flight Performance and Propulsion at the Technical University of Delft. I am really grateful to the people who supported me both during the master thesis as well as during the rest of my student life. First of all, I would like to thank my supervisor, Gianfranco La Rocca. He supported and motivated me during the entire graduation project and provided valuable feedback during all the status meeting we had. I would also like to thank the exam committee, Arvind Gangoli Rao and Dries Visser, for their flexibility and time to assess my work. Moreover, I would like to thank Ali Elham for his advice throughout the project as well as during the green light meeting. Next to these people, I owe also thanks to the fellow students in room 2.44 for both their advice, as well as the enjoyable chats during the lunch and coffee breaks. -

Airframe Integration
Aerodynamic Design of the Hybrid Wing Body Propulsion- Airframe Integration May-Fun Liou1, Hyoungjin Kim2, ByungJoon Lee3, and Meng-Sing Liou4 NASA Glenn Research Center, Cleveland, Ohio, 44135 Abstract A hybrid wingbody (HWB) concept is being considered by NASA as a potential subsonic transport aircraft that meets aerodynamic, fuel, emission, and noise goals in the time frame of the 2030s. While the concept promises advantages over conventional wing-and-tube aircraft, it poses unknowns and risks, thus requiring in-depth and broad assessments. Specifically, the configuration entails a tight integration of the airframe and propulsion geometries; the aerodynamic impact has to be carefully evaluated. With the propulsion nacelle installed on the (upper) body, the lift and drag are affected by the mutual interference effects between the airframe and nacelle. The static margin for longitudinal stability is also adversely changed. We develop a design approach in which the integrated geometry of airframe (HWB) and propulsion is accounted for simultaneously in a simple algebraic manner, via parameterization of the planform and airfoils at control sections of the wingbody. In this paper, we present the design of a 300-passenger transport that employs distributed electric fans for propulsion. The trim for stability is achieved through the use of the wingtip twist angle. The geometric shape variables are determined through the adjoint optimization method by minimizing the drag while subject to lift, pitch moment, and geometry constraints. The design results clearly show the influence on the aerodynamic characteristics of the installed nacelle and trimming for stability. A drag minimization with the trim constraint yields a reduction of 10 counts in the drag coefficient. -

B-52, the “Stratofortress”
B-52, The “StratoFortress” Aerodynamics and Performance Build-up Service • Crew – Upper Deck • 2 Pilots • Electronic Warfare Officer • Latest Model – Lower Deck – B-52H • Bombardier – Last B-52H delivered in 1962 • Radar Navigator • Transonic Bomber – Nuclear Payload capable • Deployment – 20 Cruise Missiles – 102 B-52H’s • AGM-86C – 192 B-52G’s • AGM-12 Have Nap • AGM-84 Harpoon – All in Service of USAF as – Up to 50,000 lb ordnance far as we can tell payload – $53.4 million each [1998$] – 51 bombs of 750-lb class Additional Payload • In addition to attack ordnance, B-52H carries: – Norden APQ-156 Multi-mode targeting radar – Terrain Avoidance Radar – Electro-Optical Viewing System (EVS) • Infra-red and low light display used in conjunction with terrain avoidance sensors to navigate in bad weather at low altitudes, or with the nuclear windscreen shielding in place – ECM • ALT-28 jammer • ALQ-117, -115, -172 deception jammers – Optional Stinger Air to Air missiles in aft gun-turret Weight Breakdown • Max TOGW – 505,000 lb • Fuel Weight – 299,434 lb internal – 9,114 lb on non-jettisonable under- wing pylons • Ordnance Weight – 50,000 lb • Airframe operational empty – 146452 lb Basic Geometry • Length: 160.9 ft • Tail Plane • Wing – Horizontal Tail Span: – Span: 185 ft 55.625 ft – Horizontal Tail Plan Area: – Area: 4000 ft^2 ~1004 ft^2 – Root Chord: ~34.5 ft – Mean Chord: 21.62 ft – Vertical Tail Height: – Taper Ratio: 0.37 24.339 ft – Leading Edge Sweep: – Vertical Tail Plan Area: 35° ~451 ft^2 – AR: 8.56 Wing Geometry • Wing Root: 14% -

A Conceptual Design of a Short Takeoff and Landing Regional Jet Airliner
A Conceptual Design of a Short Takeoff and Landing Regional Jet Airliner Andrew S. Hahn 1 NASA Langley Research Center, Hampton, VA, 23681 Most jet airliner conceptual designs adhere to conventional takeoff and landing performance. Given this predominance, takeoff and landing performance has not been critical, since it has not been an active constraint in the design. Given that the demand for air travel is projected to increase dramatically, there is interest in operational concepts, such as Metroplex operations that seek to unload the major hub airports by using underutilized surrounding regional airports, as well as using underutilized runways at the major hub airports. Both of these operations require shorter takeoff and landing performance than is currently available for airliners of approximately 100-passenger capacity. This study examines the issues of modeling performance in this now critical flight regime as well as the impact of progressively reducing takeoff and landing field length requirements on the aircraft’s characteristics. Nomenclature CTOL = conventional takeoff and landing FAA = Federal Aviation Administration FAR = Federal Aviation Regulation RJ = regional jet STOL = short takeoff and landing UCD = three-dimensional Weissinger lifting line aerodynamics program I. Introduction EMAND for air travel over the next fifty to D seventy-five years has been projected to be as high as three times that of today. Given that the major airport hubs are already congested, and that the ability to increase capacity at these airports by building more full- size runways is limited, unconventional solutions are being considered to accommodate the projected increased demand. Two possible solutions being considered are: Metroplex operations, and using existing underutilized runways at the major hub airports. -

No Surprises Here
REPORT 2009 BUSINESS AIRCRAFT FLEET US were having a fire sale trying to NO SURPRISES HERE quickly get rid of their business air- craft in order to avoid government and public scrutiny, countries like Brazil were turning to Business Aviation as a business solution. The result – well, we think the numbers speak for them- selves. So yes, 2009 was a slow year for Business Aviation – as expected. The World Fleet continued to grow, although at a much slower rate than past years (the world fleet grew by seven percent last year, in comparison to this year’s 4.8 percent). And yes, Europe may have been a surprise as it navigated the crisis fairly well, but only saw a 9.7 percent increase in its fleet, which although strong is almost half the size of last year’s world-lead- ing 18 percent. But the slowdowns in Europe and the US are made up for by the 15.3, 27.1 and 13.3 percent growth rates in Africa, Asia/Middle East and South America respectively. FLEET TOTALS Ok, so we changed our minds about (As of End 2009) 2009. Business Aviation is not slowing World Fleet 29,992 down. Business Aviation is simply European Fleet 3,959 changing, shifting and going where Jet Aircraft Worldwide 17,118 business goes – building new Turboprops Worldwide 12,499 economies and ensuring that business gets done. By Nick Klenske ust take a brief glance at the Overview J numbers and it should be blatant- Let us start from the end – or as close No surprise here. -

Erik Benson an Article in the September 15, 2003, US. News And
“A PERSISTENT EXCEPTION TO TEXTBOOK ECONOMICS”: A HISTORICAL OVERVIEW OF INTERNATIONAL AIRLINES Erik Benson Ouachita Baptist University ABSTRACT The recent centennial of the Wright Brothers ‘flight stimulated study of the history of aviation in general and this historical overview of international airlines in particulaz International airlines are commercial enterprises, but their history suggests that the economics behind their development was often overridden ly political, diplomatic, strategic, imperial, cultural, and emotional pressures. International airlines have not always been economically rational enterprises. An article in the September 15, 2003, US. News and World Report chronicled the struggles within the US airline industry and the airlines’ efforts to resolve their problems. Author Richard J. Newman observes that “airlines are a persistent exception to textbook economics.” International airlines are commercial enterprises, but because the economics behind their development was often overridden by political, diplomatic, strategic, imperial, cultural, and emotional pressures, they have not always been economically rational enterprises. International airlines were born in the interwar period. World War I produced aeronautical advances and a glut of airplanes and pilots that combined to attract entrepreneurs to commercial aviation. The Allies anticipated a new world of aviation enterprise at war’s end and in 1917 formed a commission to establish a framework for international airlines. The Paris Convention agreed that nations would maintain sovereign control over their airspace and that international routes would be subject to diplomatic negotiation.2 International aviation was a child of economics and politics. International airlines sprang up. In Britain, the government insisted that the enterprise must, in the words of Winston Churchill, “fly by itself’ (p. -
Design Study of a Supersonic Business Jet with Variable Sweep Wings
27TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES DESIGN STUDY OF A SUPERSONIC BUSINESS JET WITH VARIABLE SWEEP WINGS E.Jesse, J.Dijkstra ADSE b.v. Keywords: swing wing, supersonic, business jet, variable sweepback Abstract A design study for a supersonic business jet with variable sweep wings is presented. A comparison with a fixed wing design with the same technology level shows the fundamental differences. It is concluded that a variable sweep design will show worthwhile advantages over fixed wing solutions. 1 General Introduction Fig. 1 Artist impression variable sweep design AD1104 In the EU 6th framework project HISAC (High Speed AirCraft) technologies have been studied to enable the design and development of an 2 The HISAC project environmentally acceptable Small Supersonic The HISAC project is a 6th framework project Business Jet (SSBJ). In this context a for the European Union to investigate the conceptual design with a variable sweep wing technical feasibility of an environmentally has been developed by ADSE, with support acceptable small size supersonic transport from Sukhoi, Dassault Aviation, TsAGI, NLR aircraft. With a budget of 27.5 M€ and 37 and DLR. The objective of this was to assess the partners in 13 countries this 4 year effort value of such a configuration for a possible combined much of the European industry and future SSBJ programme, and to identify critical knowledge centres. design and certification areas should such a configuration prove to be advantageous. To provide a framework for the different studies and investigations foreseen in the HISAC This paper presents the resulting design project a number of aircraft concept designs including the relevant considerations which were defined, which would all meet at least the determined the selected configuration. -
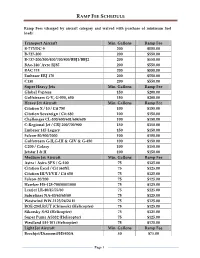
Ramp Fee Schedule
RAMP FEE SCHEDULE Ramp Fees (charged by aircraft category and waived with purchase of minimum fuel load): Transport Aircraft Min. Gallons Ramp Fee B-717/DC-9 200 $550.00 B-727-200 200 $550.00 B-737-200/300/400/700/800/BBJ1/BBJ2 200 $550.00 BAe-146/ Avro RJ85 200 $550.00 BAC 111 200 $550.00 Embraer ERJ 170 200 $550.00 C130 200 $550.00 Super Heavy Jets Min. Gallons Ramp Fee Global Express 150 $200.00 Gulfstream G-V, G-550, 650 150 $200.00 Heavy Jet Aircraft Min. Gallons Ramp Fee Citation X / 10 / Cit 750 100 $150.00 Citation Sovereign / Cit 680 100 $150.00 Challenger CL-300/600/601/604/605 100 $150.00 C-Regional Jet / CRJ 200/700/900 150 $150.00 Embraer 145 Legacy 150 $150.00 Falcon-50/900/2000 100 $150.00 Gulfstream G-II,G-III & GIV & G-450 100 $150.00 G200 / Galaxy 100 $150.00 Jetstar I & II 100 $150.00 Medium Jet Aircraft Min. Gallons Ramp Fee Astra / Astra SPX / G-100 75 $125.00 Citation Excel / Cit 560XL 75 $125.00 Citation III/VI/VII / Cit 650 75 $125.00 Falcon-20/200 75 $125.00 Hawker HS-125-700/800/1000 75 $125.00 Learjet LR-40/45/55/60 75 $125.00 Sabreliner NA-40/60/65/80 75 $125.00 Westwind WW-1123/24/24 II 75 $125.00 BOE-234LR/UT (Chinook) (Helicopter) 75 $125.00 Sikorsky S-92 (Helicopter) 75 $125.00 Super Puma AS332 (Helicopter) 75 $125.00 Westland EH-101 (Helicopter) 75 $125.00 Light Jet Aircraft Min. -
Global Fleet & Mro Market Forecast Summary
GLOBAL FLEET & MRO MARKET FORECAST SUMMARY 2017-2027 AUTHORS Tom Cooper, Vice President John Smiley, Senior Manager Chad Porter, Technical Specialist Chris Precourt, Technical Analyst For over a decade, Oliver Wyman has surveyed aviation and aerospace senior executives and industry influencers about key trends and challenges across the Maintenance, Repair, and Overhaul market. If you are responsible for maintenance and engineering activities at a carrier, aftermarket activities at an OEM, business operations at an MRO, or a lessor, you may want to participate in our survey. For more information, please contact our survey team at: [email protected]. To read last year’s survey, please see: http://www.oliverwyman.com/our-expertise/insights/2016/apr/mro-survey-2016.html . CONTENTS 1. EXECUTIVE SUMMARY 1 2. STATE OF THE INDUSTRY 5 Global Economic Outlook 7 Economic Drivers 11 3. FLEET FORECAST 17 In-Service Fleet Forecast 18 4. MRO MARKET FORECAST 31 Copyright © Oliver Wyman 1 EXECUTIVE SUMMARY EXECUTIVE SUMMARY Oliver Wyman’s 2017 assessment and 10-year outlook for the commercial airline transport fleet and the associated maintenance, repair, and overhaul (MRO) market marks the 17th year of supporting the industry with informed, validated industry data. This has become the most credible go-to forecast for many executives in the airline and MRO industry as well as for those with financial interests in the sector, such as private equity firms, investment banks and investment analysts. The global airline industry has made radical changes in the last few years and is producing strong financial results. While the degree of success varies among the world regions, favorable fuel prices and widespread capacity discipline are regarded as key elements in the 2016 record high in global profitability ($35.6 billion). -

Analytical Fuselage and Wing Weight Estimation of Transport Aircraft
NASA Technical Memorandum 110392 Analytical Fuselage and Wing Weight Estimation of Transport Aircraft Mark D. Ardema, Mark C. Chambers, Anthony P. Patron, Andrew S. Hahn, Hirokazu Miura, and Mark D. Moore May 1996 National Aeronautics and Space Administration Ames Research Center Moffett Field, California 94035-1000 NASA Technical Memorandum 110392 Analytical Fuselage and Wing Weight Estimation of Transport Aircraft Mark D. Ardema, Mark C. Chambers, and Anthony P. Patron, Santa Clara University, Santa Clara, California Andrew S. Hahn, Hirokazu Miura, and Mark D. Moore, Ames Research Center, Moffett Field, California May 1996 National Aeronautics and Space Administration Ames Research Center Moffett Field, California 94035-1000 2 Nomenclature KF1 frame stiffness coefficient, IAFF/ A fuselage cross-sectional area Kmg shell minimum gage factor AB fuselage surface area KP shell geometry factor for hoop stress AF frame cross-sectional area KS constant for shear stress in wing (AR) aspect ratio of wing Kth sandwich thickness parameter b wingspan; intercept of regression line lB fuselage length bs stiffener spacing lLE length from leading edge to structural box at theoretical root chord bS wing structural semispan, measured along quarter chord from fuselage lMG length from nose to fuselage mounted main gear bw stiffener depth lNG length from nose to nose gear CF Shanley’s constant lTE length from trailing edge to structural box at CP center of pressure theoretical root chord C root chord of wing at fuselage intersection R l1 length of nose -

Aircraft of Today. Aerospace Education I
DOCUMENT RESUME ED 068 287 SE 014 551 AUTHOR Sayler, D. S. TITLE Aircraft of Today. Aerospace EducationI. INSTITUTION Air Univ.,, Maxwell AFB, Ala. JuniorReserve Office Training Corps. SPONS AGENCY Department of Defense, Washington, D.C. PUB DATE 71 NOTE 179p. EDRS PRICE MF-$0.65 HC-$6.58 DESCRIPTORS *Aerospace Education; *Aerospace Technology; Instruction; National Defense; *PhysicalSciences; *Resource Materials; Supplementary Textbooks; *Textbooks ABSTRACT This textbook gives a brief idea aboutthe modern aircraft used in defense and forcommercial purposes. Aerospace technology in its present form has developedalong certain basic principles of aerodynamic forces. Differentparts in an airplane have different functions to balance theaircraft in air, provide a thrust, and control the general mechanisms.Profusely illustrated descriptions provide a picture of whatkinds of aircraft are used for cargo, passenger travel, bombing, and supersonicflights. Propulsion principles and descriptions of differentkinds of engines are quite helpful. At the end of each chapter,new terminology is listed. The book is not available on the market andis to be used only in the Air Force ROTC program. (PS) SC AEROSPACE EDUCATION I U S DEPARTMENT OF HEALTH. EDUCATION & WELFARE OFFICE OF EDUCATION THIS DOCUMENT HAS BEEN REPRO OUCH) EXACTLY AS RECEIVED FROM THE PERSON OR ORGANIZATION ORIG INATING IT POINTS OF VIEW OR OPIN 'IONS STATED 00 NOT NECESSARILY REPRESENT OFFICIAL OFFICE OF EOU CATION POSITION OR POLICY AIR FORCE JUNIOR ROTC MR,UNIVERS17/14AXWELL MR FORCEBASE, ALABAMA Aerospace Education I Aircraft of Today D. S. Sayler Academic Publications Division 3825th Support Group (Academic) AIR FORCE JUNIOR ROTC AIR UNIVERSITY MAXWELL AIR FORCE BASE, ALABAMA 2 1971 Thispublication has been reviewed and approvedby competent personnel of the preparing command in accordance with current directiveson doctrine, policy, essentiality, propriety, and quality. -

The Power for Flight: NASA's Contributions To
The Power Power The forFlight NASA’s Contributions to Aircraft Propulsion for for Flight Jeremy R. Kinney ThePower for NASA’s Contributions to Aircraft Propulsion Flight Jeremy R. Kinney Library of Congress Cataloging-in-Publication Data Names: Kinney, Jeremy R., author. Title: The power for flight : NASA’s contributions to aircraft propulsion / Jeremy R. Kinney. Description: Washington, DC : National Aeronautics and Space Administration, [2017] | Includes bibliographical references and index. Identifiers: LCCN 2017027182 (print) | LCCN 2017028761 (ebook) | ISBN 9781626830387 (Epub) | ISBN 9781626830370 (hardcover) ) | ISBN 9781626830394 (softcover) Subjects: LCSH: United States. National Aeronautics and Space Administration– Research–History. | Airplanes–Jet propulsion–Research–United States– History. | Airplanes–Motors–Research–United States–History. Classification: LCC TL521.312 (ebook) | LCC TL521.312 .K47 2017 (print) | DDC 629.134/35072073–dc23 LC record available at https://lccn.loc.gov/2017027182 Copyright © 2017 by the National Aeronautics and Space Administration. The opinions expressed in this volume are those of the authors and do not necessarily reflect the official positions of the United States Government or of the National Aeronautics and Space Administration. This publication is available as a free download at http://www.nasa.gov/ebooks National Aeronautics and Space Administration Washington, DC Table of Contents Dedication v Acknowledgments vi Foreword vii Chapter 1: The NACA and Aircraft Propulsion, 1915–1958.................................1 Chapter 2: NASA Gets to Work, 1958–1975 ..................................................... 49 Chapter 3: The Shift Toward Commercial Aviation, 1966–1975 ...................... 73 Chapter 4: The Quest for Propulsive Efficiency, 1976–1989 ......................... 103 Chapter 5: Propulsion Control Enters the Computer Era, 1976–1998 ........... 139 Chapter 6: Transiting to a New Century, 1990–2008 ....................................