The Interplay Between Hyperbolic Symmetry and History
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Ricci, Levi-Civita, and the Birth of General Relativity Reviewed by David E
BOOK REVIEW Einstein’s Italian Mathematicians: Ricci, Levi-Civita, and the Birth of General Relativity Reviewed by David E. Rowe Einstein’s Italian modern Italy. Nor does the author shy away from topics Mathematicians: like how Ricci developed his absolute differential calculus Ricci, Levi-Civita, and the as a generalization of E. B. Christoffel’s (1829–1900) work Birth of General Relativity on quadratic differential forms or why it served as a key By Judith R. Goodstein tool for Einstein in his efforts to generalize the special theory of relativity in order to incorporate gravitation. In This delightful little book re- like manner, she describes how Levi-Civita was able to sulted from the author’s long- give a clear geometric interpretation of curvature effects standing enchantment with Tul- in Einstein’s theory by appealing to his concept of parallel lio Levi-Civita (1873–1941), his displacement of vectors (see below). For these and other mentor Gregorio Ricci Curbastro topics, Goodstein draws on and cites a great deal of the (1853–1925), and the special AMS, 2018, 211 pp. 211 AMS, 2018, vast secondary literature produced in recent decades by the world that these and other Ital- “Einstein industry,” in particular the ongoing project that ian mathematicians occupied and helped to shape. The has produced the first 15 volumes of The Collected Papers importance of their work for Einstein’s general theory of of Albert Einstein [CPAE 1–15, 1987–2018]. relativity is one of the more celebrated topics in the history Her account proceeds in three parts spread out over of modern mathematical physics; this is told, for example, twelve chapters, the first seven of which cover episodes in [Pais 1982], the standard biography of Einstein. -

The Birth of Hyperbolic Geometry Carl Friederich Gauss
The Birth of Hyperbolic Geometry Carl Friederich Gauss • There is some evidence to suggest that Gauss began studying the problem of the fifth postulate as early as 1789, when he was 12. We know in letters that he had done substantial work of the course of many years: Carl Friederich Gauss • “On the supposition that Euclidean geometry is not valid, it is easy to show that similar figures do not exist; in that case, the angles of an equilateral triangle vary with the side in which I see no absurdity at all. The angle is a function of the side and the sides are functions of the angle, a function which, of course, at the same time involves a constant length. It seems somewhat of a paradox to say that a constant length could be given a priori as it were, but in this again I see nothing inconsistent. Indeed it would be desirable that Euclidean geometry were not valid, for then we should possess a general a priori standard of measure.“ – Letter to Gerling, 1816 Carl Friederich Gauss • "I am convinced more and more that the necessary truth of our geometry cannot be demonstrated, at least not by the human intellect to the human understanding. Perhaps in another world, we may gain other insights into the nature of space which at present are unattainable to us. Until then we must consider geometry as of equal rank not with arithmetic, which is purely a priori, but with mechanics.“ –Letter to Olbers, 1817 Carl Friederich Gauss • " There is no doubt that it can be rigorously established that the sum of the angles of a rectilinear triangle cannot exceed 180°. -

Understand the Principles and Properties of Axiomatic (Synthetic
Michael Bonomi Understand the principles and properties of axiomatic (synthetic) geometries (0016) Euclidean Geometry: To understand this part of the CST I decided to start off with the geometry we know the most and that is Euclidean: − Euclidean geometry is a geometry that is based on axioms and postulates − Axioms are accepted assumptions without proofs − In Euclidean geometry there are 5 axioms which the rest of geometry is based on − Everybody had no problems with them except for the 5 axiom the parallel postulate − This axiom was that there is only one unique line through a point that is parallel to another line − Most of the geometry can be proven without the parallel postulate − If you do not assume this postulate, then you can only prove that the angle measurements of right triangle are ≤ 180° Hyperbolic Geometry: − We will look at the Poincare model − This model consists of points on the interior of a circle with a radius of one − The lines consist of arcs and intersect our circle at 90° − Angles are defined by angles between the tangent lines drawn between the curves at the point of intersection − If two lines do not intersect within the circle, then they are parallel − Two points on a line in hyperbolic geometry is a line segment − The angle measure of a triangle in hyperbolic geometry < 180° Projective Geometry: − This is the geometry that deals with projecting images from one plane to another this can be like projecting a shadow − This picture shows the basics of Projective geometry − The geometry does not preserve length -

Riemann's Contribution to Differential Geometry
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Elsevier - Publisher Connector Historia Mathematics 9 (1982) l-18 RIEMANN'S CONTRIBUTION TO DIFFERENTIAL GEOMETRY BY ESTHER PORTNOY UNIVERSITY OF ILLINOIS AT URBANA-CHAMPAIGN, URBANA, IL 61801 SUMMARIES In order to make a reasonable assessment of the significance of Riemann's role in the history of dif- ferential geometry, not unduly influenced by his rep- utation as a great mathematician, we must examine the contents of his geometric writings and consider the response of other mathematicians in the years immedi- ately following their publication. Pour juger adkquatement le role de Riemann dans le developpement de la geometric differentielle sans etre influence outre mesure par sa reputation de trks grand mathematicien, nous devons &udier le contenu de ses travaux en geometric et prendre en consideration les reactions des autres mathematiciens au tours de trois an&es qui suivirent leur publication. Urn Riemann's Einfluss auf die Entwicklung der Differentialgeometrie richtig einzuschZtzen, ohne sich von seinem Ruf als bedeutender Mathematiker iiberm;issig beeindrucken zu lassen, ist es notwendig den Inhalt seiner geometrischen Schriften und die Haltung zeitgen&sischer Mathematiker unmittelbar nach ihrer Verijffentlichung zu untersuchen. On June 10, 1854, Georg Friedrich Bernhard Riemann read his probationary lecture, "iber die Hypothesen welche der Geometrie zu Grunde liegen," before the Philosophical Faculty at Gdttingen ill. His biographer, Dedekind [1892, 5491, reported that Riemann had worked hard to make the lecture understandable to nonmathematicians in the audience, and that the result was a masterpiece of presentation, in which the ideas were set forth clearly without the aid of analytic techniques. -

Hyperbolic Geometry
Flavors of Geometry MSRI Publications Volume 31,1997 Hyperbolic Geometry JAMES W. CANNON, WILLIAM J. FLOYD, RICHARD KENYON, AND WALTER R. PARRY Contents 1. Introduction 59 2. The Origins of Hyperbolic Geometry 60 3. Why Call it Hyperbolic Geometry? 63 4. Understanding the One-Dimensional Case 65 5. Generalizing to Higher Dimensions 67 6. Rudiments of Riemannian Geometry 68 7. Five Models of Hyperbolic Space 69 8. Stereographic Projection 72 9. Geodesics 77 10. Isometries and Distances in the Hyperboloid Model 80 11. The Space at Infinity 84 12. The Geometric Classification of Isometries 84 13. Curious Facts about Hyperbolic Space 86 14. The Sixth Model 95 15. Why Study Hyperbolic Geometry? 98 16. When Does a Manifold Have a Hyperbolic Structure? 103 17. How to Get Analytic Coordinates at Infinity? 106 References 108 Index 110 1. Introduction Hyperbolic geometry was created in the first half of the nineteenth century in the midst of attempts to understand Euclid’s axiomatic basis for geometry. It is one type of non-Euclidean geometry, that is, a geometry that discards one of Euclid’s axioms. Einstein and Minkowski found in non-Euclidean geometry a This work was supported in part by The Geometry Center, University of Minnesota, an STC funded by NSF, DOE, and Minnesota Technology, Inc., by the Mathematical Sciences Research Institute, and by NSF research grants. 59 60 J. W. CANNON, W. J. FLOYD, R. KENYON, AND W. R. PARRY geometric basis for the understanding of physical time and space. In the early part of the twentieth century every serious student of mathematics and physics studied non-Euclidean geometry. -

Chapter 14 Hyperbolic Geometry Math 4520, Fall 2017
Chapter 14 Hyperbolic geometry Math 4520, Fall 2017 So far we have talked mostly about the incidence structure of points, lines and circles. But geometry is concerned about the metric, the way things are measured. We also mentioned in the beginning of the course about Euclid's Fifth Postulate. Can it be proven from the the other Euclidean axioms? This brings up the subject of hyperbolic geometry. In the hyperbolic plane the parallel postulate is false. If a proof in Euclidean geometry could be found that proved the parallel postulate from the others, then the same proof could be applied to the hyperbolic plane to show that the parallel postulate is true, a contradiction. The existence of the hyperbolic plane shows that the Fifth Postulate cannot be proven from the others. Assuming that Mathematics itself (or at least Euclidean geometry) is consistent, then there is no proof of the parallel postulate in Euclidean geometry. Our purpose in this chapter is to show that THE HYPERBOLIC PLANE EXISTS. 14.1 A quick history with commentary In the first half of the nineteenth century people began to realize that that a geometry with the Fifth postulate denied might exist. N. I. Lobachevski and J. Bolyai essentially devoted their lives to the study of hyperbolic geometry. They wrote books about hyperbolic geometry, and showed that there there were many strange properties that held. If you assumed that one of these strange properties did not hold in the geometry, then the Fifth postulate could be proved from the others. But this just amounted to replacing one axiom with another equivalent one. -
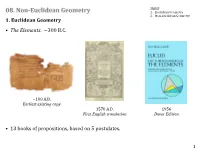
08. Non-Euclidean Geometry 1
Topics: 08. Non-Euclidean Geometry 1. Euclidean Geometry 2. Non-Euclidean Geometry 1. Euclidean Geometry • The Elements. ~300 B.C. ~100 A.D. Earliest existing copy 1570 A.D. 1956 First English translation Dover Edition • 13 books of propositions, based on 5 postulates. 1 Euclid's 5 Postulates 1. A straight line can be drawn from any point to any point. • • A B 2. A finite straight line can be produced continuously in a straight line. • • A B 3. A circle may be described with any center and distance. • 4. All right angles are equal to one another. 2 5. If a straight line falling on two straight lines makes the interior angles on the same side together less than two right angles, then the two straight lines, if produced indefinitely, meet on that side on which the angles are together less than two right angles. � � • � + � < 180∘ • Euclid's Accomplishment: showed that all geometric claims then known follow from these 5 postulates. • Is 5th Postulate necessary? (1st cent.-19th cent.) • Basic strategy: Attempt to show that replacing 5th Postulate with alternative leads to contradiction. 3 • Equivalent to 5th Postulate (Playfair 1795): 5'. Through a given point, exactly one line can be drawn parallel to a given John Playfair (1748-1819) line (that does not contain the point). • Parallel straight lines are straight lines which, being in the same plane and being • Only two logically possible alternatives: produced indefinitely in either direction, do not meet one 5none. Through a given point, no lines can another in either direction. (The Elements: Book I, Def. -

4. Hyperbolic Geometry
4. Hyperbolic Geometry 4.1 The three geometries Here we will look at the basic ideas of hyperbolic geometry including the ideas of lines, distance, angle, angle sum, area and the isometry group and Þnally the construction of Schwartz triangles. We develop enough formulas for the disc model to be able to understand and calculate in the isometry group and to work with the isometries arising from Schwartz triangles. Some of the derivations are complicated or just brute force symbolic computations, so we illustrate the basic idea with hand calculation and relegate the drudgery to Maple worksheets. None of the major results are proven but rather are given as statements of fact. Refer to the Beardon [10] and Magnus [21] texts for more background on hyperbolic geometry. 4.2 Synthetic and analytic geometry similarities To put hyperbolic geometry in context we compare the three basic geometries. There are three two dimensional geometries classiÞed on the basis of the parallel postulate, or alternatively the angle sum theorem for triangles. Geometry Parallel Postulate Angle sum Models spherical no parallels > 180◦ sphere euclidean unique parallels =180◦ standard plane hyperbolic inÞnitely many parallels < 180◦ disc, upper half plane The three geometries share a lot of common properties familiar from synthetic geom- etry. Each has a collection of lines which are certain curves in the given model as detailed in the table below. Geometry Symbol Model Lines spherical S2, C sphere great circles euclidean C standard plane standard lines b lines and circles perpendicular unit disc D z C : z < 1 { ∈ | | } to the boundary lines and circles perpendicular upper half plane U z C :Im(z) > 0 { ∈ } to the real axis Remark 4.1 If we just want to refer to a model of hyperbolic geometry we will use H to denote it. -

Science and Fascism
Science and Fascism Scientific Research Under a Totalitarian Regime Michele Benzi Department of Mathematics and Computer Science Emory University Outline 1. Timeline 2. The ascent of Italian mathematics (1860-1920) 3. The Italian Jewish community 4. The other sciences (mostly Physics) 5. Enter Mussolini 6. The Oath 7. The Godfathers of Italian science in the Thirties 8. Day of infamy 9. Fascist rethoric in science: some samples 10. The effect of Nazism on German science 11. The aftermath: amnesty or amnesia? 12. Concluding remarks Timeline • 1861 Italy achieves independence and is unified under the Savoy monarchy. Venice joins the new Kingdom in 1866, Rome in 1870. • 1863 The Politecnico di Milano is founded by a mathe- matician, Francesco Brioschi. • 1871 The capital is moved from Florence to Rome. • 1880s Colonial period begins (Somalia, Eritrea, Lybia and Dodecanese). • 1908 IV International Congress of Mathematicians held in Rome, presided by Vito Volterra. Timeline (cont.) • 1913 Emigration reaches highest point (more than 872,000 leave Italy). About 75% of the Italian popu- lation is illiterate and employed in agriculture. • 1914 Benito Mussolini is expelled from Socialist Party. • 1915 May: Italy enters WWI on the side of the Entente against the Central Powers. More than 650,000 Italian soldiers are killed (1915-1918). Economy is devastated, peace treaty disappointing. • 1921 January: Italian Communist Party founded in Livorno by Antonio Gramsci and other former Socialists. November: National Fascist Party founded in Rome by Mussolini. Strikes and social unrest lead to political in- stability. Timeline (cont.) • 1922 October: March on Rome. Mussolini named Prime Minister by the King. -
Prize Is Awarded Every Three Years at the Joint Mathematics Meetings
AMERICAN MATHEMATICAL SOCIETY LEVI L. CONANT PRIZE This prize was established in 2000 in honor of Levi L. Conant to recognize the best expository paper published in either the Notices of the AMS or the Bulletin of the AMS in the preceding fi ve years. Levi L. Conant (1857–1916) was a math- ematician who taught at Dakota School of Mines for three years and at Worcester Polytechnic Institute for twenty-fi ve years. His will included a bequest to the AMS effective upon his wife’s death, which occurred sixty years after his own demise. Citation Persi Diaconis The Levi L. Conant Prize for 2012 is awarded to Persi Diaconis for his article, “The Markov chain Monte Carlo revolution” (Bulletin Amer. Math. Soc. 46 (2009), no. 2, 179–205). This wonderful article is a lively and engaging overview of modern methods in probability and statistics, and their applications. It opens with a fascinating real- life example: a prison psychologist turns up at Stanford University with encoded messages written by prisoners, and Marc Coram uses the Metropolis algorithm to decrypt them. From there, the article gets even more compelling! After a highly accessible description of Markov chains from fi rst principles, Diaconis colorfully illustrates many of the applications and venues of these ideas. Along the way, he points to some very interesting mathematics and some fascinating open questions, especially about the running time in concrete situ- ations of the Metropolis algorithm, which is a specifi c Monte Carlo method for constructing Markov chains. The article also highlights the use of spectral methods to deduce estimates for the length of the chain needed to achieve mixing. -

MATH32052 Hyperbolic Geometry
MATH32052 Hyperbolic Geometry Charles Walkden 12th January, 2019 MATH32052 Contents Contents 0 Preliminaries 3 1 Where we are going 6 2 Length and distance in hyperbolic geometry 13 3 Circles and lines, M¨obius transformations 18 4 M¨obius transformations and geodesics in H 23 5 More on the geodesics in H 26 6 The Poincar´edisc model 39 7 The Gauss-Bonnet Theorem 44 8 Hyperbolic triangles 52 9 Fixed points of M¨obius transformations 56 10 Classifying M¨obius transformations: conjugacy, trace, and applications to parabolic transformations 59 11 Classifying M¨obius transformations: hyperbolic and elliptic transforma- tions 62 12 Fuchsian groups 66 13 Fundamental domains 71 14 Dirichlet polygons: the construction 75 15 Dirichlet polygons: examples 79 16 Side-pairing transformations 84 17 Elliptic cycles 87 18 Generators and relations 92 19 Poincar´e’s Theorem: the case of no boundary vertices 97 20 Poincar´e’s Theorem: the case of boundary vertices 102 c The University of Manchester 1 MATH32052 Contents 21 The signature of a Fuchsian group 109 22 Existence of a Fuchsian group with a given signature 117 23 Where we could go next 123 24 All of the exercises 126 25 Solutions 138 c The University of Manchester 2 MATH32052 0. Preliminaries 0. Preliminaries 0.1 Contact details § The lecturer is Dr Charles Walkden, Room 2.241, Tel: 0161 27 55805, Email: [email protected]. My office hour is: WHEN?. If you want to see me at another time then please email me first to arrange a mutually convenient time. 0.2 Course structure § 0.2.1 MATH32052 § MATH32052 Hyperbolic Geoemtry is a 10 credit course. -

Hyperbolic Geometry
Flavors of Geometry MSRI Publications Volume 31, 1997 Hyperbolic Geometry JAMES W. CANNON, WILLIAM J. FLOYD, RICHARD KENYON, AND WALTER R. PARRY Contents 1. Introduction 59 2. The Origins of Hyperbolic Geometry 60 3. Why Call it Hyperbolic Geometry? 63 4. Understanding the One-Dimensional Case 65 5. Generalizing to Higher Dimensions 67 6. Rudiments of Riemannian Geometry 68 7. Five Models of Hyperbolic Space 69 8. Stereographic Projection 72 9. Geodesics 77 10. Isometries and Distances in the Hyperboloid Model 80 11. The Space at Infinity 84 12. The Geometric Classification of Isometries 84 13. Curious Facts about Hyperbolic Space 86 14. The Sixth Model 95 15. Why Study Hyperbolic Geometry? 98 16. When Does a Manifold Have a Hyperbolic Structure? 103 17. How to Get Analytic Coordinates at Infinity? 106 References 108 Index 110 1. Introduction Hyperbolic geometry was created in the first half of the nineteenth century in the midst of attempts to understand Euclid’s axiomatic basis for geometry. It is one type of non-Euclidean geometry, that is, a geometry that discards one of Euclid’s axioms. Einstein and Minkowski found in non-Euclidean geometry a ThisworkwassupportedinpartbyTheGeometryCenter,UniversityofMinnesota,anSTC funded by NSF, DOE, and Minnesota Technology, Inc., by the Mathematical Sciences Research Institute, and by NSF research grants. 59 60 J. W. CANNON, W. J. FLOYD, R. KENYON, AND W. R. PARRY geometric basis for the understanding of physical time and space. In the early part of the twentieth century every serious student of mathematics and physics studied non-Euclidean geometry. This has not been true of the mathematicians and physicists of our generation.