Adapting Standard Video Codecs for Depth Streaming
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Encoding H.264 Video for Streaming and Progressive Download
W4: KEY ENCODING SKILLS, TECHNOLOGIES TECHNIQUES STREAMING MEDIA EAST - 2019 Jan Ozer www.streaminglearningcenter.com [email protected]/ 276-235-8542 @janozer Agenda • Introduction • Lesson 5: How to build encoding • Lesson 1: Delivering to Computers, ladder with objective quality metrics Mobile, OTT, and Smart TVs • Lesson 6: Current status of CMAF • Lesson 2: Codec review • Lesson 7: Delivering with dynamic • Lesson 3: Delivering HEVC over and static packaging HLS • Lesson 4: Per-title encoding Lesson 1: Delivering to Computers, Mobile, OTT, and Smart TVs • Computers • Mobile • OTT • Smart TVs Choosing an ABR Format for Computers • Can be DASH or HLS • Factors • Off-the-shelf player vendor (JW Player, Bitmovin, THEOPlayer, etc.) • Encoding/transcoding vendor Choosing an ABR Format for iOS • Native support (playback in the browser) • HTTP Live Streaming • Playback via an app • Any, including DASH, Smooth, HDS or RTMP Dynamic Streaming iOS Media Support Native App Codecs H.264 (High, Level 4.2), HEVC Any (Main10, Level 5 high) ABR formats HLS Any DRM FairPlay Any Captions CEA-608/708, WebVTT, IMSC1 Any HDR HDR10, DolbyVision ? http://bit.ly/hls_spec_2017 iOS Encoding Ladders H.264 HEVC http://bit.ly/hls_spec_2017 HEVC Hardware Support - iOS 3 % bit.ly/mobile_HEVC http://bit.ly/glob_med_2019 Android: Codec and ABR Format Support Codecs ABR VP8 (2.3+) • Multiple codecs and ABR H.264 (3+) HLS (3+) technologies • Serious cautions about HLS • DASH now close to 97% • HEVC VP9 (4.4+) DASH 4.4+ Via MSE • Main Profile Level 3 – mobile HEVC (5+) -

Google Chrome Browser Dropping H.264 Support 14 January 2011, by John Messina
Google Chrome Browser dropping H.264 support 14 January 2011, by John Messina with the codecs already supported by the open Chromium project. Specifically, we are supporting the WebM (VP8) and Theora video codecs, and will consider adding support for other high-quality open codecs in the future. Though H.264 plays an important role in video, as our goal is to enable open innovation, support for the codec will be removed and our resources directed towards completely open codec technologies." Since Google is developing the WebM technology, they can develop a good video standard using open source faster and better than a current standard video player can. The problem with H.264 is that it cost money and On January 11, Google announced that Chrome’s the patents for the technologies in H.264 are held HTML5 video support will change to match codecs by 27 companies, including Apple and Microsoft supported by the open source Chromium project. and controlled by MPEG LA. This makes H.264 Chrome will support the WebM (VP8) and Theora video expensive for content owners and software makers. codecs, and support for the H.264 codec will be removed to allow resources to focus on open codec Since Apple and Microsoft hold some of the technologies. patents for the H.264 technology and make money off the licensing fees, it's in their best interest not to change the technology in their browsers. (PhysOrg.com) -- Google will soon stop supporting There is however concerns that Apple and the H.264 video codec in their Chrome browser Microsoft's lack of support for WebM may impact and will support its own WebM and Ogg Theora the Chrome browser. -

Qoe Based Comparison of H.264/AVC and Webm/VP8 in Error-Prone Wireless Networkqoe Based Comparison of H.264/AVC and Webm/VP8 In
QoE based comparison of H.264/AVC and WebM/VP8 in an error-prone wireless network Omer Nawaz, Tahir Nawaz Minhas, Markus Fiedler Department of Technology and Aesthetics (DITE) Blekinge Institute of Technology Karlskrona, Sweden fomer.nawaz, tahir.nawaz.minhas, markus.fi[email protected] Abstract—Quality of Experience (QoE) management is a prime the subsequent inter-frames are dependent will result in more topic of research community nowadays as video streaming, quality loss as compared to lower priority frame. Hence, the online gaming and security applications are completely reliant traditional QoS metrics simply fails to analyze the network on the network service quality. Moreover, there are no standard models to map Quality of Service (QoS) into QoE. HTTP measurement’s impact on the end-user service satisfaction. media streaming is primarily used for such applications due The other approach to measure the user-satisfaction is by to its coherence with the Internet and simplified management. direct interaction via subjective assessment. But the downside The most common video codecs used for video streaming are is the time and cost associated with these qualitative subjective H.264/AVC and Google’s VP8. In this paper, we have analyzed assessments and their inability to be applied in real-time the performance of these two codecs from the perspective of QoE. The most common end-user medium for accessing video content networks. The objective measurement quality tools like Mean is via home based wireless networks. We have emulated an error- Squared Error (MSE), Peak signal-to-noise ratio (PSNR), prone wireless network with different scenarios involving packet Structural Similarity Index (SSIM), etc. -
Digital Audio Processor Vp-8
VP-8 DIGITAL AUDIO PROCESSOR TECHNICAL MANUAL ORSIS ® 600 Industrial Drive, New Bern, North Carolina, USA 28562 VP-8 Digital Audio Processor Technical Manual - 1st Edition - Revised [VP8GuiSetup_2_3_x(and above).exe] ©2009 Vorsis* Vorsis 600 Industrial Drive New Bern, North Carolina 28562 tel 252-638-7000 / fax 252-637-1285 * a division of Wheatstone Corporation VP-8 / Apr 2009 Attention! A TTENTION Federal Communications Commission (FCC) Compliance Notice: Radio Frequency Notice NOTE: This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to Part 15 of the FCC rules. These limits are designed to provide reasonable protection against harmful interference when the equipment is operated in a commercial environment. This equipment generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with the instruction manual, may cause harmful interference to radio communications. Operation of this equipment in a residential area is likely to cause harmful interference in which case the user will be required to correct the interference at his own expense. This is a Class A product. In a domestic environment, this product may cause radio interference, in which case, the user may be required to take appropriate measures. This equipment must be installed and wired properly in order to assure compliance with FCC regulations. Caution! Any modifications not expressly approved in writing by Wheatstone could void the user's authority to operate this equipment. VP-8 / May 2008 READ ME! Making Audio Processing History In 2005 Wheatstone returned to its roots in audio processing with the creation of Vorsis, a new division of the company. -
VP8 Vs VP9 – Is This About Quality Or Bitrate?
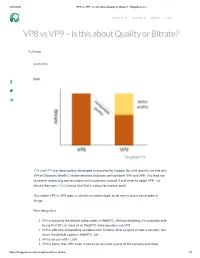
4/27/2020 VP8 vs VP9 - Is this about Quality or Bitrate? • BlogGeek.me PRODUCTS SERVICES ABOUT BLOG VP8 vs VP9 – Is this about Quality or Bitrate? Technology 09/05/2016 Both. VP8 and VP9 are video codecs developed and pushed by Google. Up until recently, we had only VP8 in Chrome’s WebRTC implementation and now, we have both VP8 and VP9. This lead me to several interesting conversations with customers around if and when to adopt VP9 – or should they use H.264 instead (but that’s a story for another post). This whole VP8 vs VP9 topic is usually misunderstood, so let me try to put some order in things. First things ƒrst: 1. VP8 is currently the default video codec in WebRTC. Without checking, it is probably safe to say that 90% or more of all WebRTC video sessions use VP8 2. VP9 is o∆cially and publicly available from Chrome 49 or so (give or take a version). But it isn’t the default codec in WebRTC. Yet 3. VP8 is on par with H.264 4. VP9 is better than VP8 when it comes to resultant quality of the compressed video https://bloggeek.me/vp8-vs-vp9-quality-or-bitrate/ 1/5 4/27/2020 VP8 vs VP9 - Is this about Quality or Bitrate? • BlogGeek.me 5. VP8 takes up less resources (=CPU) to compress video With that in mind, the following can be deduced: You can use the migration to VP9 for one of two things (or both): 1. Improve the quality of your video experience 2. -

20.1 Data Sheet - Supported File Formats
20.1 Data Sheet - Supported File Formats Target release 20.1 Epic Document status DRAFT Document owner Dieter Van Rijsselbergen Designer Not applicable Architecture Dieter Van Rijsselbergen QA Assumptions Implementation of Avid proxy formats produced by Edge impose a number of known Avid-specific conversions. Avid proxies are under consideration and will be included upon binding commitment. Implementation of ingest through rewrapping (instead of transcoding) of formats with Avid-supported video and audio codecs are under consideration and will be included upon binding commitment. Implementation of ingest through transcoding to Avid-supported video codecs other than DNxHD or DNxHR are under consideration and will be included upon binding commitment. Limecraft Flow and Edge - Ingest File Formats # File Codecs and Variants Edge Flow Status Notes Container ingest ingest 1 MXF MXF OP1a Deployed No P2 spanned clips supported at the Sony XDCAM (DV25, MPEG moment. IMX codecs), XDCAM HD and Referencing original OP1a media from Flow XDCAM HD 422 AAFs is possible using AMA media linking in also for Canon Avid. C300/C500 and XF series AAF workflows for P2 are not implemented end-to-end yet. Sony XAVC (incl. XAVC Intra and XAVC-L codecs) ARRI Alexa MXF (DNxHD codec) AS-11 MXF (MPEG IMX/D10, AVC-I codecs) MXF OP-atom Deployed. P2 (DV codec) and P2 HD Only (DVCPro HD, AVC-I 50 and available AVC-I 100 codecs) in Edge. 1.1 MXF Sony RAW and X-OCN (XT, LT, Deployed. Due to the heavy data rates involved in ST) Only processing these files, a properly provisioned for Sony Venice, F65, available system is required, featuring fast storage PMW-F55, PMW-F5 and NEX in Edge. -

Speeding up VP9 Intra Encoder with Hierarchical Deep Learning Based Partition Prediction Somdyuti Paul, Andrey Norkin, and Alan C
IEEE TRANSACTIONS ON IMAGE PROCESSING 1 Speeding up VP9 Intra Encoder with Hierarchical Deep Learning Based Partition Prediction Somdyuti Paul, Andrey Norkin, and Alan C. Bovik Abstract—In VP9 video codec, the sizes of blocks are decided during encoding by recursively partitioning 64×64 superblocks using rate-distortion optimization (RDO). This process is com- putationally intensive because of the combinatorial search space of possible partitions of a superblock. Here, we propose a deep learning based alternative framework to predict the intra- mode superblock partitions in the form of a four-level partition tree, using a hierarchical fully convolutional network (H-FCN). We created a large database of VP9 superblocks and the corresponding partitions to train an H-FCN model, which was subsequently integrated with the VP9 encoder to reduce the intra- mode encoding time. The experimental results establish that our approach speeds up intra-mode encoding by 69.7% on average, at the expense of a 1.71% increase in the Bjøntegaard-Delta bitrate (BD-rate). While VP9 provides several built-in speed levels which are designed to provide faster encoding at the expense of decreased rate-distortion performance, we find that our model is able to outperform the fastest recommended speed level of the reference VP9 encoder for the good quality intra encoding configuration, in terms of both speedup and BD-rate. Fig. 1. Recursive partition of VP9 superblock at four levels showing the possible types of partition at each level. Index Terms—VP9, video encoding, block partitioning, intra prediction, convolutional neural networks, machine learning. supports partitioning a block into four square quadrants, VP9 I. -

An Analysis of VP8, a New Video Codec for the Web Sean Cassidy
Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 11-1-2011 An Analysis of VP8, a new video codec for the web Sean Cassidy Follow this and additional works at: http://scholarworks.rit.edu/theses Recommended Citation Cassidy, Sean, "An Analysis of VP8, a new video codec for the web" (2011). Thesis. Rochester Institute of Technology. Accessed from This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact [email protected]. An Analysis of VP8, a New Video Codec for the Web by Sean A. Cassidy A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of Master of Science in Computer Engineering Supervised by Professor Dr. Andres Kwasinski Department of Computer Engineering Rochester Institute of Technology Rochester, NY November, 2011 Approved by: Dr. Andres Kwasinski R.I.T. Dept. of Computer Engineering Dr. Marcin Łukowiak R.I.T. Dept. of Computer Engineering Dr. Muhammad Shaaban R.I.T. Dept. of Computer Engineering Thesis Release Permission Form Rochester Institute of Technology Kate Gleason College of Engineering Title: An Analysis of VP8, a New Video Codec for the Web I, Sean A. Cassidy, hereby grant permission to the Wallace Memorial Library to repro- duce my thesis in whole or part. Sean A. Cassidy Date i Acknowledgements I would like to thank my thesis advisors, Dr. Andres Kwasinski, Dr. Marcin Łukowiak, and Dr. Muhammad Shaaban for their suggestions, advice, and support. -

Encoding, Fast and Slow: Low-Latency Video Processing Using Thousands of Tiny Threads Sadjad Fouladi, Riad S
Encoding, Fast and Slow: Low-Latency Video Processing Using Thousands of Tiny Threads Sadjad Fouladi, Riad S. Wahby, and Brennan Shacklett, Stanford University; Karthikeyan Vasuki Balasubramaniam, University of California, San Diego; William Zeng, Stanford University; Rahul Bhalerao, University of California, San Diego; Anirudh Sivaraman, Massachusetts Institute of Technology; George Porter, University of California, San Diego; Keith Winstein, Stanford University https://www.usenix.org/conference/nsdi17/technical-sessions/presentation/fouladi This paper is included in the Proceedings of the 14th USENIX Symposium on Networked Systems Design and Implementation (NSDI ’17). March 27–29, 2017 • Boston, MA, USA ISBN 978-1-931971-37-9 Open access to the Proceedings of the 14th USENIX Symposium on Networked Systems Design and Implementation is sponsored by USENIX. Encoding, Fast and Slow: Low-Latency Video Processing Using Thousands of Tiny Threads Sadjad Fouladi , Riad S. Wahby , Brennan Shacklett , Karthikeyan Vasuki Balasubramaniam , William Zeng , Rahul Bhalerao , Anirudh Sivaraman , George Porter , Keith Winstein Stanford University , University of California San Diego , Massachusetts Institute of Technology Abstract sion relies on temporal correlations among nearby frames. Splitting the video across independent threads prevents We describe ExCamera, a system that can edit, transform, exploiting correlations that cross the split, harming com- and encode a video, including 4K and VR material, with pression efficiency. As a result, video-processing systems low latency. The system makes two major contributions. generally use only coarse-grained parallelism—e.g., one First, we designed a framework to run general-purpose thread per video, or per multi-second chunk of a video— parallel computations on a commercial “cloud function” frustrating efforts to process any particular video quickly. -

Video - Dive Into HTML5
Video - Dive Into HTML5 You are here: Home ‣ Dive Into HTML5 ‣ Video on the Web ❧ Diving In nyone who has visited YouTube.com in the past four years knows that you can embed video in a web page. But prior to HTML5, there was no standards- based way to do this. Virtually all the video you’ve ever watched “on the web” has been funneled through a third-party plugin — maybe QuickTime, maybe RealPlayer, maybe Flash. (YouTube uses Flash.) These plugins integrate with your browser well enough that you may not even be aware that you’re using them. That is, until you try to watch a video on a platform that doesn’t support that plugin. HTML5 defines a standard way to embed video in a web page, using a <video> element. Support for the <video> element is still evolving, which is a polite way of saying it doesn’t work yet. At least, it doesn’t work everywhere. But don’t despair! There are alternatives and fallbacks and options galore. <video> element support IE Firefox Safari Chrome Opera iPhone Android 9.0+ 3.5+ 3.0+ 3.0+ 10.5+ 1.0+ 2.0+ But support for the <video> element itself is really only a small part of the story. Before we can talk about HTML5 video, you first need to understand a little about video itself. (If you know about video already, you can skip ahead to What Works on the Web.) ❧ http://diveintohtml5.org/video.html (1 of 50) [6/8/2011 6:36:23 PM] Video - Dive Into HTML5 Video Containers You may think of video files as “AVI files” or “MP4 files.” In reality, “AVI” and “MP4″ are just container formats. -
Openmax IL VP8 and Webp Codec
OpenMAX™ Integration Layer Extension VP8 and WebP Codec Component Version 1.0.0 Copyright © 2012 The Khronos Group Inc. February 14, 2012 Document version 1.0.0.0 Copyright © 2005-2012 The Khronos Group Inc. All Rights Reserved. This specification is protected by copyright laws and contains material proprietary to the Khronos Group, Inc. It or any components may not be reproduced, republished, distributed, transmitted, displayed, broadcast, or otherwise exploited in any manner without the express prior written permission of the Khronos Group. You may use this specification for implementing the functionality therein, without altering or removing any trademark, copyright or other notice from the specification, but the receipt or possession of this specification does not convey any rights to reproduce, disclose, or distribute its contents, or to manufacture, use, or sell anything that it may describe, in whole or in part. Khronos Group grants express permission to any current Promoter, Contributor or Adopter member of Khronos to copy and redistribute UNMODIFIED versions of this specification in any fashion, provided that NO CHARGE is made for the specification and the latest available update of the specification for any version of the API is used whenever possible. Such distributed specification may be reformatted AS LONG AS the contents of the specification are not changed in any way. The specification may be incorporated into a product that is sold as long as such product includes significant independent work developed by the seller. A link to the current version of this specification on the Khronos Group website should be included whenever possible with specification distributions. -

Content Guidelines
APPEDINX H Content Guidelines Content Guidelines The following table lists the content guidelines for the Cisco IEC 4650. Table H-1 Content Guidelines Video formats Multiple video formats are supported on the native player including MPEG-1, MPEG-2, MPEG-4, and H.264. Multiple containers/muxers are supported on the native player including AVI, MOV, MP4, MPEG2, and MPEG-2/TS (extensions: .wmv, .avi, .mov, .mp4, .mpg, .ts). Formats not recommended: On2 VP 6 (used by old FLV) Note Native video is strongly preferred over Flash video. Note The IEC 4650 supports WebM (VP8/Vorbis) and Ogg (Theora/Vorbis) for HTML5 video. Note Use of the native player strongly preferred over HTML5 video. Note The native player’s video compatibility can be validated by using VLC 2.0.8. Audio formats Multiple audio formats are supported on the native player including mp2, mp3, aac, mp4a, wma1, wma2, flac, and mpga. HTML HTML4 / CSS3 (early support for HTML5) Flash Up to Flash 11 Cisco Interactive Experience Client User Guide H-1 Appendix H Content Guidelines Content Guidelines Video Performance When using a native player, the IEC 4610 can support H.264 video up to Limitations 720p @ 6Mbps. Note The amount of CPU power required to decode a video clip depends on multiple factors such as codec, bitrate, and resolution of the video source. Different video codecs have different compression algorithms. H.264 offers much better compression efficiency than MPEG-2 or MPEG-4 but uses much more a complex algorithm and requires more CPU power to decode. For example, to achieve the same level of quality, it may require 5 Mbps using MPEG2 but less than 2 Mbps using H.264.