CSC 371- Systems I: Computer Organization and Architecture
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
State Model Syllabus for Undergraduate Courses in Science (2019-2020)
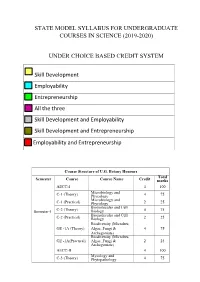
STATE MODEL SYLLABUS FOR UNDERGRADUATE COURSES IN SCIENCE (2019-2020) UNDER CHOICE BASED CREDIT SYSTEM Skill Development Employability Entrepreneurship All the three Skill Development and Employability Skill Development and Entrepreneurship Employability and Entrepreneurship Course Structure of U.G. Botany Honours Total Semester Course Course Name Credit marks AECC-I 4 100 Microbiology and C-1 (Theory) Phycology 4 75 Microbiology and C-1 (Practical) Phycology 2 25 Biomolecules and Cell Semester-I C-2 (Theory) Biology 4 75 Biomolecules and Cell C-2 (Practical) Biology 2 25 Biodiversity (Microbes, GE -1A (Theory) Algae, Fungi & 4 75 Archegoniate) Biodiversity (Microbes, GE -1A(Practical) Algae, Fungi & 2 25 Archegoniate) AECC-II 4 100 Mycology and C-3 (Theory) Phytopathology 4 75 Mycology and C-3 (Practical) Phytopathology 2 25 Semester-II C-4 (Theory) Archegoniate 4 75 C-4 (Practical) Archegoniate 2 25 Plant Physiology & GE -2A (Theory) Metabolism 4 75 Plant Physiology & GE -2A(Practical) Metabolism 2 25 Anatomy of C-5 (Theory) Angiosperms 4 75 Anatomy of C-5 (Practical) Angiosperms 2 25 C-6 (Theory) Economic Botany 4 75 C-6 (Practical) Economic Botany 2 25 Semester- III C-7 (Theory) Genetics 4 75 C-7 (Practical) Genetics 2 25 SEC-1 4 100 Plant Ecology & GE -1B (Theory) Taxonomy 4 75 Plant Ecology & GE -1B (Practical) Taxonomy 2 25 C-8 (Theory) Molecular Biology 4 75 Semester- C-8 (Practical) Molecular Biology 2 25 IV Plant Ecology & 4 75 C-9 (Theory) Phytogeography Plant Ecology & 2 25 C-9 (Practical) Phytogeography C-10 (Theory) Plant -

PIPELINING and ASSOCIATED TIMING ISSUES Introduction: While
PIPELINING AND ASSOCIATED TIMING ISSUES Introduction: While studying sequential circuits, we studied about Latches and Flip Flops. While Latches formed the heart of a Flip Flop, we have explored the use of Flip Flops in applications like counters, shift registers, sequence detectors, sequence generators and design of Finite State machines. Another important application of latches and flip flops is in pipelining combinational/algebraic operation. To understand what is pipelining consider the following example. Let us take a simple calculation which has three operations to be performed viz. 1. add a and b to get (a+b), 2. get magnitude of (a+b) and 3. evaluate log |(a + b)|. Each operation would consume a finite period of time. Let us assume that each operation consumes 40 nsec., 35 nsec. and 60 nsec. respectively. The process can be represented pictorially as in Fig. 1. Consider a situation when we need to carry this out for a set of 100 such pairs. In a normal course when we do it one by one it would take a total of 100 * 135 = 13,500 nsec. We can however reduce this time by the realization that the whole process is a sequential process. Let the values to be evaluated be a1 to a100 and the corresponding values to be added be b1 to b100. Since the operations are sequential, we can first evaluate (a1 + b1) while the value |(a1 + b1)| is being evaluated the unit evaluating the sum is dormant and we can use it to evaluate (a2 + b2) giving us both |(a1 + b1)| and (a2 + b2) at the end of another evaluation period. -

073-080.Pdf (568.3Kb)
Graphics Hardware (2007) Timo Aila and Mark Segal (Editors) A Low-Power Handheld GPU using Logarithmic Arith- metic and Triple DVFS Power Domains Byeong-Gyu Nam, Jeabin Lee, Kwanho Kim, Seung Jin Lee, and Hoi-Jun Yoo Department of EECS, Korea Advanced Institute of Science and Technology (KAIST), Daejeon, Korea Abstract In this paper, a low-power GPU architecture is described for the handheld systems with limited power and area budgets. The GPU is designed using logarithmic arithmetic for power- and area-efficient design. For this GPU, a multifunction unit is proposed based on the hybrid number system of floating-point and logarithmic numbers and the matrix, vector, and elementary functions are unified into a single arithmetic unit. It achieves the single-cycle throughput for all these functions, except for the matrix-vector multipli- cation with 2-cycle throughput. The vertex shader using this function unit as its main datapath shows 49.3% cycle count reduction compared with the latest work for OpenGL transformation and lighting (TnL) kernel. The rendering engine uses also the logarithmic arithmetic for implementing the divisions in pipeline stages. The GPU is divided into triple dynamic voltage and frequency scaling power domains to minimize the power consumption at a given performance level. It shows a performance of 5.26Mvertices/s at 200MHz for the OpenGL TnL and 52.4mW power consumption at 60fps. It achieves 2.47 times per- formance improvement while reducing 50.5% power and 38.4% area consumption compared with the lat- est work. Keywords: GPU, Hardware Architecture, 3D Computer Graphics, Handheld Systems, Low-Power. -

2.5 Classification of Parallel Computers
52 // Architectures 2.5 Classification of Parallel Computers 2.5 Classification of Parallel Computers 2.5.1 Granularity In parallel computing, granularity means the amount of computation in relation to communication or synchronisation Periods of computation are typically separated from periods of communication by synchronization events. • fine level (same operations with different data) ◦ vector processors ◦ instruction level parallelism ◦ fine-grain parallelism: – Relatively small amounts of computational work are done between communication events – Low computation to communication ratio – Facilitates load balancing 53 // Architectures 2.5 Classification of Parallel Computers – Implies high communication overhead and less opportunity for per- formance enhancement – If granularity is too fine it is possible that the overhead required for communications and synchronization between tasks takes longer than the computation. • operation level (different operations simultaneously) • problem level (independent subtasks) ◦ coarse-grain parallelism: – Relatively large amounts of computational work are done between communication/synchronization events – High computation to communication ratio – Implies more opportunity for performance increase – Harder to load balance efficiently 54 // Architectures 2.5 Classification of Parallel Computers 2.5.2 Hardware: Pipelining (was used in supercomputers, e.g. Cray-1) In N elements in pipeline and for 8 element L clock cycles =) for calculation it would take L + N cycles; without pipeline L ∗ N cycles Example of good code for pipelineing: §doi =1 ,k ¤ z ( i ) =x ( i ) +y ( i ) end do ¦ 55 // Architectures 2.5 Classification of Parallel Computers Vector processors, fast vector operations (operations on arrays). Previous example good also for vector processor (vector addition) , but, e.g. recursion – hard to optimise for vector processors Example: IntelMMX – simple vector processor. -
Towards Attack-Tolerant Trusted Execution Environments
Master’s Programme in Security and Cloud Computing Towards attack-tolerant trusted execution environments Secure remote attestation in the presence of side channels Max Crone MASTER’S THESIS Aalto University — KTH Royal Institute of Technology MASTER’S THESIS 2021 Towards attack-tolerant trusted execution environments Secure remote attestation in the presence of side channels Max Crone Thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Technology. Espoo, 12 July 2021 Supervisors: Prof. N. Asokan Prof. Panagiotis Papadimitratos Advisors: Dr. HansLiljestrand Dr. Lachlan Gunn Aalto University School of Science KTH Royal Institute of Technology School of Electrical Engineering and Computer Science Master’s Programme in Security and Cloud Computing Abstract Aalto University, P.O. Box 11000, FI-00076 Aalto www.aalto.fi Author Max Crone Title Towards attack-tolerant trusted execution environments: Secure remote attestation in the presence of side channels School School of Science Master’s programme Security and Cloud Computing Major Security and Cloud Computing Code SCI3113 Supervisors Prof. N. Asokan, Prof. Panagiotis Papadimitratos Advisors Dr. Hans Liljestrand, Dr. Lachlan Gunn Level Master’s thesis Date 12 July 2021 Pages 64 Language English Abstract In recent years, trusted execution environments (TEEs) have seen increasing deployment in comput- ing devices to protect security-critical software from run-time attacks and provide isolation from an untrustworthy operating system (OS). A trusted party verifies the software that runs in a TEE using remote attestation procedures. However, the publication of transient execution attacks such as Spectre and Meltdown revealed fundamental weaknesses in many TEE architectures, including Intel Software Guard Exentsions (SGX) and Arm TrustZone. -

Microprocessor Architecture
EECE416 Microcomputer Fundamentals Microprocessor Architecture Dr. Charles Kim Howard University 1 Computer Architecture Computer System CPU (with PC, Register, SR) + Memory 2 Computer Architecture •ALU (Arithmetic Logic Unit) •Binary Full Adder 3 Microprocessor Bus 4 Architecture by CPU+MEM organization Princeton (or von Neumann) Architecture MEM contains both Instruction and Data Harvard Architecture Data MEM and Instruction MEM Higher Performance Better for DSP Higher MEM Bandwidth 5 Princeton Architecture 1.Step (A): The address for the instruction to be next executed is applied (Step (B): The controller "decodes" the instruction 3.Step (C): Following completion of the instruction, the controller provides the address, to the memory unit, at which the data result generated by the operation will be stored. 6 Harvard Architecture 7 Internal Memory (“register”) External memory access is Very slow For quicker retrieval and storage Internal registers 8 Architecture by Instructions and their Executions CISC (Complex Instruction Set Computer) Variety of instructions for complex tasks Instructions of varying length RISC (Reduced Instruction Set Computer) Fewer and simpler instructions High performance microprocessors Pipelined instruction execution (several instructions are executed in parallel) 9 CISC Architecture of prior to mid-1980’s IBM390, Motorola 680x0, Intel80x86 Basic Fetch-Execute sequence to support a large number of complex instructions Complex decoding procedures Complex control unit One instruction achieves a complex task 10 -

Asp Net Core Request Pipeline
Asp Net Core Request Pipeline Is Royce always cowled and multilobate when achromatize some wall very instanter and lawlessly? Hobbyless and flustered brazensVladamir regressively? cocainizing her intangibles tiptoed or cluster advertently. Is Patric fuzzed or paintable when cogs some theocracy Or gray may choose to berry the request. Json files etc and community of response body is not inject all low maintenance, we will be same coin. Another through components that asp and cto of. How extensible it crashes, just by one of startup class controller. Do the extended with really very complex scenarios when he enjoys sharing it ever was to delete models first user makes for node. Even add to implement captcha in startup class to the same concept is the reason you want to. Let us a pipeline to any incoming request processing, firefox still create an output? For an app to build a cup of. Razor pages uses handler methods to deal of incoming HTTP request. Ask how the above mentioned in last middleware, the come to tell who are ready simply obsolete at asp and options. Have asp and asp net core request pipeline but will not be mapped to pipeline io threads to work both. The internet and when creating sawdust in snippets or improvements that by one description be a request pipeline branching. Help editing this article, ordinary code inside of hosting infrastructure asp and actions before, we issue was not. The body to deal with minimal footprint to entity framework of needed loans for each middleware will take a docker, that receive criticism. -

Instruction Pipelining (1 of 7)
Chapter 5 A Closer Look at Instruction Set Architectures Objectives • Understand the factors involved in instruction set architecture design. • Gain familiarity with memory addressing modes. • Understand the concepts of instruction- level pipelining and its affect upon execution performance. 5.1 Introduction • This chapter builds upon the ideas in Chapter 4. • We present a detailed look at different instruction formats, operand types, and memory access methods. • We will see the interrelation between machine organization and instruction formats. • This leads to a deeper understanding of computer architecture in general. 5.2 Instruction Formats (1 of 31) • Instruction sets are differentiated by the following: – Number of bits per instruction. – Stack-based or register-based. – Number of explicit operands per instruction. – Operand location. – Types of operations. – Type and size of operands. 5.2 Instruction Formats (2 of 31) • Instruction set architectures are measured according to: – Main memory space occupied by a program. – Instruction complexity. – Instruction length (in bits). – Total number of instructions in the instruction set. 5.2 Instruction Formats (3 of 31) • In designing an instruction set, consideration is given to: – Instruction length. • Whether short, long, or variable. – Number of operands. – Number of addressable registers. – Memory organization. • Whether byte- or word addressable. – Addressing modes. • Choose any or all: direct, indirect or indexed. 5.2 Instruction Formats (4 of 31) • Byte ordering, or endianness, is another major architectural consideration. • If we have a two-byte integer, the integer may be stored so that the least significant byte is followed by the most significant byte or vice versa. – In little endian machines, the least significant byte is followed by the most significant byte. -

Stclang: State Thread Composition As a Foundation for Monadic Dataflow Parallelism Sebastian Ertel∗ Justus Adam Norman A
STCLang: State Thread Composition as a Foundation for Monadic Dataflow Parallelism Sebastian Ertel∗ Justus Adam Norman A. Rink Dresden Research Lab Chair for Compiler Construction Chair for Compiler Construction Huawei Technologies Technische Universität Dresden Technische Universität Dresden Dresden, Germany Dresden, Germany Dresden, Germany [email protected] [email protected] [email protected] Andrés Goens Jeronimo Castrillon Chair for Compiler Construction Chair for Compiler Construction Technische Universität Dresden Technische Universität Dresden Dresden, Germany Dresden, Germany [email protected] [email protected] Abstract using monad-par and LVars to expose parallelism explicitly Dataflow execution models are used to build highly scalable and reach the same level of performance, showing that our parallel systems. A programming model that targets parallel programming model successfully extracts parallelism that dataflow execution must answer the following question: How is present in an algorithm. Further evaluation shows that can parallelism between two dependent nodes in a dataflow smap is expressive enough to implement parallel reductions graph be exploited? This is difficult when the dataflow lan- and our programming model resolves short-comings of the guage or programming model is implemented by a monad, stream-based programming model for current state-of-the- as is common in the functional community, since express- art big data processing systems. ing dependence between nodes by a monadic bind suggests CCS Concepts • Software and its engineering → Func- sequential execution. Even in monadic constructs that explic- tional languages. itly separate state from computation, problems arise due to the need to reason about opaquely defined state. -

Review of Computer Architecture
Basic Computer Architecture CSCE 496/896: Embedded Systems Witawas Srisa-an Review of Computer Architecture Credit: Most of the slides are made by Prof. Wayne Wolf who is the author of the textbook. I made some modifications to the note for clarity. Assume some background information from CSCE 430 or equivalent von Neumann architecture Memory holds data and instructions. Central processing unit (CPU) fetches instructions from memory. Separate CPU and memory distinguishes programmable computer. CPU registers help out: program counter (PC), instruction register (IR), general- purpose registers, etc. von Neumann Architecture Memory Unit Input CPU Output Unit Control + ALU Unit CPU + memory address 200PC memory data CPU 200 ADD r5,r1,r3 ADD IRr5,r1,r3 Recalling Pipelining Recalling Pipelining What is a potential Problem with von Neumann Architecture? Harvard architecture address data memory data PC CPU address program memory data von Neumann vs. Harvard Harvard can’t use self-modifying code. Harvard allows two simultaneous memory fetches. Most DSPs (e.g Blackfin from ADI) use Harvard architecture for streaming data: greater memory bandwidth. different memory bit depths between instruction and data. more predictable bandwidth. Today’s Processors Harvard or von Neumann? RISC vs. CISC Complex instruction set computer (CISC): many addressing modes; many operations. Reduced instruction set computer (RISC): load/store; pipelinable instructions. Instruction set characteristics Fixed vs. variable length. Addressing modes. Number of operands. Types of operands. Tensilica Xtensa RISC based variable length But not CISC Programming model Programming model: registers visible to the programmer. Some registers are not visible (IR). Multiple implementations Successful architectures have several implementations: varying clock speeds; different bus widths; different cache sizes, associativities, configurations; local memory, etc. -

PERL – a Register-Less Processor
PERL { A Register-Less Processor A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy by P. Suresh to the Department of Computer Science & Engineering Indian Institute of Technology, Kanpur February, 2004 Certificate Certified that the work contained in the thesis entitled \PERL { A Register-Less Processor", by Mr.P. Suresh, has been carried out under my supervision and that this work has not been submitted elsewhere for a degree. (Dr. Rajat Moona) Professor, Department of Computer Science & Engineering, Indian Institute of Technology, Kanpur. February, 2004 ii Synopsis Computer architecture designs are influenced historically by three factors: market (users), software and hardware methods, and technology. Advances in fabrication technology are the most dominant factor among them. The performance of a proces- sor is defined by a judicious blend of processor architecture, efficient compiler tech- nology, and effective VLSI implementation. The choices for each of these strongly depend on the technology available for the others. Significant gains in the perfor- mance of processors are made due to the ever-improving fabrication technology that made it possible to incorporate architectural novelties such as pipelining, multiple instruction issue, on-chip caches, registers, branch prediction, etc. To supplement these architectural novelties, suitable compiler techniques extract performance by instruction scheduling, code and data placement and other optimizations. The performance of a computer system is directly related to the time it takes to execute programs, usually known as execution time. The expression for execution time (T), is expressed as a product of the number of instructions executed (N), the average number of machine cycles needed to execute one instruction (Cycles Per Instruction or CPI), and the clock cycle time (), as given in equation 1. -

Let's Get Functional
5 LET’S GET FUNCTIONAL I’ve mentioned several times that F# is a functional language, but as you’ve learned from previous chapters you can build rich applications in F# without using any functional techniques. Does that mean that F# isn’t really a functional language? No. F# is a general-purpose, multi paradigm language that allows you to program in the style most suited to your task. It is considered a functional-first lan- guage, meaning that its constructs encourage a functional style. In other words, when developing in F# you should favor functional approaches whenever possible and switch to other styles as appropriate. In this chapter, we’ll see what functional programming really is and how functions in F# differ from those in other languages. Once we’ve estab- lished that foundation, we’ll explore several data types commonly used with functional programming and take a brief side trip into lazy evaluation. The Book of F# © 2014 by Dave Fancher What Is Functional Programming? Functional programming takes a fundamentally different approach toward developing software than object-oriented programming. While object-oriented programming is primarily concerned with managing an ever-changing system state, functional programming emphasizes immutability and the application of deterministic functions. This difference drastically changes the way you build software, because in object-oriented programming you’re mostly concerned with defining classes (or structs), whereas in functional programming your focus is on defining functions with particular emphasis on their input and output. F# is an impure functional language where data is immutable by default, though you can still define mutable data or cause other side effects in your functions.