An Angular/Linear Speed Bicycle Example
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rotational Motion (The Dynamics of a Rigid Body)
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Robert Katz Publications Research Papers in Physics and Astronomy 1-1958 Physics, Chapter 11: Rotational Motion (The Dynamics of a Rigid Body) Henry Semat City College of New York Robert Katz University of Nebraska-Lincoln, [email protected] Follow this and additional works at: https://digitalcommons.unl.edu/physicskatz Part of the Physics Commons Semat, Henry and Katz, Robert, "Physics, Chapter 11: Rotational Motion (The Dynamics of a Rigid Body)" (1958). Robert Katz Publications. 141. https://digitalcommons.unl.edu/physicskatz/141 This Article is brought to you for free and open access by the Research Papers in Physics and Astronomy at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Robert Katz Publications by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. 11 Rotational Motion (The Dynamics of a Rigid Body) 11-1 Motion about a Fixed Axis The motion of the flywheel of an engine and of a pulley on its axle are examples of an important type of motion of a rigid body, that of the motion of rotation about a fixed axis. Consider the motion of a uniform disk rotat ing about a fixed axis passing through its center of gravity C perpendicular to the face of the disk, as shown in Figure 11-1. The motion of this disk may be de scribed in terms of the motions of each of its individual particles, but a better way to describe the motion is in terms of the angle through which the disk rotates. -

Linear and Angular Velocity Examples
Linear and Angular Velocity Examples Example 1 Determine the angular displacement in radians of 6.5 revolutions. Round to the nearest tenth. Each revolution equals 2 radians. For 6.5 revolutions, the number of radians is 6.5 2 or 13 . 13 radians equals about 40.8 radians. Example 2 Determine the angular velocity if 4.8 revolutions are completed in 4 seconds. Round to the nearest tenth. The angular displacement is 4.8 2 or 9.6 radians. = t 9.6 = = 9.6 , t = 4 4 7.539822369 Use a calculator. The angular velocity is about 7.5 radians per second. Example 3 AMUSEMENT PARK Jack climbs on a horse that is 12 feet from the center of a merry-go-round. 1 The merry-go-round makes 3 rotations per minute. Determine Jack’s angular velocity in radians 4 per second. Round to the nearest hundredth. 1 The merry-go-round makes 3 or 3.25 revolutions per minute. Convert revolutions per minute to radians 4 per second. 3.25 revolutions 1 minute 2 radians 0.3403392041 radian per second 1 minute 60 seconds 1 revolution Jack has an angular velocity of about 0.34 radian per second. Example 4 Determine the linear velocity of a point rotating at an angular velocity of 12 radians per second at a distance of 8 centimeters from the center of the rotating object. Round to the nearest tenth. v = r v = (8)(12 ) r = 8, = 12 v 301.5928947 Use a calculator. The linear velocity is about 301.6 centimeters per second. -

Owner's Manual
IBD-Mountain EN 07-01-19 m0520 © Batch Bicycles Ltd 2019 PLEASE VISIT YOUR AUTHORIZED BATCH RETAILER FOR SERVICE AND QUESTIONS. Batch Bicycles 8889 Gander Creek Dr. Dayton, OH 45342 833.789.8899 batchbicycles.com OWNER’S MANUAL for Mountain Bikes BATCH Limited Warranty We’ve Got You Covered damage, failure, or loss that is caused by improper Owner’s Manual Index Batch Bicycles comes with our industry’s best war- assembly, maintenance, adjustment, storage, or ranty program – Batch Bicycles Service Program. use of the product. This limited warranty does not Safety and Warnings ...........................................................................................2-5 Once your Batch Bicycle is registered, Batch extend to future performance. Bicycles provides each original retail purchaser of a Batch Bicycle a warranty against defects in materi- This Limited Warranty will be void if the prod- Assembly and Parts ..............................................................................................6-18 als and workmanship, as stated below: uct is ever: • Used in any competitive sport Brake System .............................................................................................................. 19-22 General: • Used for stunt riding, jumping, aerobatics or Warranty Part or model specifi cations are subject to change similar activity without notice. • Modifi ed in any way Shift System .................................................................................................................. 23-29 This Limited Warranty -
Adjustments and Settings Electronic Groupsets
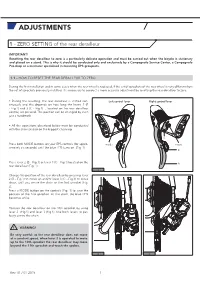
ADJUSTMENTS 1 - ZERO SETTING of the rear derailleur IMPORTANT! Resetting the rear derailleur to zero is a particularly delicate operation and must be carried out when the bicycle is stationary and placed on a stand. This is why it should be conducted only and exclusively by a Campagnolo Service Center, a Campagnolo Pro-shop or a mechanic specialised in mounting EPS groupsets. 1.1 - HOW TO RESET THE REAR DERAILLEUR TO ZERO During the first installation and in some cases when the rear wheel is replaced, if the set of sprockets of the new wheel is very different from the set of sprockets previously installed, it is necessary to conduct a more accurate adjustment by resetting the rear derailleur to zero. • During the resetting, the rear derailleur is shifted con- Left control lever Right control lever tinuously and this depends on how long the levers 2 (B - Fig.1) and 3 (C - Fig.1) , located on the rear derailleur control, are pressed. The position can be changed by even just a hundredth. • All the operations described below must be conducted with the chain placed on the biggest chainring. C Press both MODE buttons on your EPS controls (for appro- mode mode ximately six seconds) until the blue LED turns on (Fig. 1). B Press lever 2 (B - Fig.1) or lever 3 (C - Fig.1) located on the A rear derailleur (Fig. 1). 1 Change the position of the rear derailleur by pressing lever 2 (B - Fig.1) to move up and/or lever 3 (C - Fig.1) to move down, until you centre the chain on the 2nd sprocket (Fig. -

Rotational Motion of Electric Machines
Rotational Motion of Electric Machines • An electric machine rotates about a fixed axis, called the shaft, so its rotation is restricted to one angular dimension. • Relative to a given end of the machine’s shaft, the direction of counterclockwise (CCW) rotation is often assumed to be positive. • Therefore, for rotation about a fixed shaft, all the concepts are scalars. 17 Angular Position, Velocity and Acceleration • Angular position – The angle at which an object is oriented, measured from some arbitrary reference point – Unit: rad or deg – Analogy of the linear concept • Angular acceleration =d/dt of distance along a line. – The rate of change in angular • Angular velocity =d/dt velocity with respect to time – The rate of change in angular – Unit: rad/s2 position with respect to time • and >0 if the rotation is CCW – Unit: rad/s or r/min (revolutions • >0 if the absolute angular per minute or rpm for short) velocity is increasing in the CCW – Analogy of the concept of direction or decreasing in the velocity on a straight line. CW direction 18 Moment of Inertia (or Inertia) • Inertia depends on the mass and shape of the object (unit: kgm2) • A complex shape can be broken up into 2 or more of simple shapes Definition Two useful formulas mL2 m J J() RRRR22 12 3 1212 m 22 JRR()12 2 19 Torque and Change in Speed • Torque is equal to the product of the force and the perpendicular distance between the axis of rotation and the point of application of the force. T=Fr (Nm) T=0 T T=Fr • Newton’s Law of Rotation: Describes the relationship between the total torque applied to an object and its resulting angular acceleration. -

Physics B Topics Overview ∑
Physics 106 Lecture 1 Introduction to Rotation SJ 7th Ed.: Chap. 10.1 to 3 • Course Introduction • Course Rules & Assignment • TiTopics Overv iew • Rotation (rigid body) versus translation (point particle) • Rotation concepts and variables • Rotational kinematic quantities Angular position and displacement Angular velocity & acceleration • Rotation kinematics formulas for constant angular acceleration • Analogy with linear kinematics 1 Physics B Topics Overview PHYSICS A motion of point bodies COVERED: kinematics - translation dynamics ∑Fext = ma conservation laws: energy & momentum motion of “Rigid Bodies” (extended, finite size) PHYSICS B rotation + translation, more complex motions possible COVERS: rigid bodies: fixed size & shape, orientation matters kinematics of rotation dynamics ∑Fext = macm and ∑ Τext = Iα rotational modifications to energy conservation conservation laws: energy & angular momentum TOPICS: 3 weeks: rotation: ▪ angular versions of kinematics & second law ▪ angular momentum ▪ equilibrium 2 weeks: gravitation, oscillations, fluids 1 Angular variables: language for describing rotation Measure angles in radians simple rotation formulas Definition: 360o 180o • 2π radians = full circle 1 radian = = = 57.3o • 1 radian = angle that cuts off arc length s = radius r 2π π s arc length ≡ s = r θ (in radians) θ ≡ rad r r s θ’ θ Example: r = 10 cm, θ = 100 radians Æ s = 1000 cm = 10 m. Rigid body rotation: angular displacement and arc length Angular displacement is the angle an object (rigid body) rotates through during some time interval..... ...also the angle that a reference line fixed in a body sweeps out A rigid body rotates about some rotation axis – a line located somewhere in or near it, pointing in some y direction in space • One polar coordinate θ specifies position of the whole body about this rotation axis. -

Pinarello Maat Whitepaper
MAAT WHITE PAPER 1.0 PINARELLO MAAT © Cicli Pinarello Srl - All rights reserved - 2019 MAAT WHITE PAPER 2 © Cicli Pinarello Srl - All rights reserved - 2019 MAAT WHITE PAPER CONTENTS 4 1. INTRODUCTION 4 1.1 Pinarello 5 1.2 Track Experience Over the Years 6 2. SUMMARY OF THE IMPROVEMENTS 8 3. AERODYNAMICS DESIGN 9 3.1 Headtube 10 3.2 Fork 11 3.3 Seat Stays 11 3.4 Downtube and Seattube 11 3.5 Other Details 12 4. STRUCTURAL DESIGN 12 4.1 Chainstays and Downtube 13 4.2 Material Choice 14 5. CUSTOMIZATION AND VERSATILITY 14 5.1 Multidiscipline 15 5.2 Headset Spacer Versatility 15 5.3 Tire Clearance 16 6. HANDLEBAR 19 7. SIZES 19 7.1 Frame Sizes 19 7.2 Maat Handlebar Sizes 21 8. GENERAL SPECIFICATIONS 21 9. RACING 3 © Cicli Pinarello Srl - All rights reserved - 2019 MAAT WHITE PAPER INTRODUCTION 1. INTRODUCTION 1.1 Pinarello Cicli Pinarello S.R.L. is one of the most famous and winning bike manufacturers in the world. Founded in Treviso (Italy) in 1952 by Giovanni (Nani) Pinarello, it produces high end racing bikes. This name, Pinarello, recalls legendary victories of the greatest cyclists of all times: since 1975, the first victory in Giro d’Italia with Fausto Bertoglio, Pinarello has won all the most important races in the world, including Olympics, World Championships and Tour de France. 4 © Cicli Pinarello Srl - All rights reserved - 2019 MAAT WHITE PAPER 1. INTRODUCTION 1.2 Track Experience Over the Years For many years Pinarello has developed track bikes to cover different needs of riders. -

Characteristics of Track Cycling
Sports Med 2001; 31 (7): 457-468 REVIEW ARTICLE 0112-1642/01/0007-0457/$22.00/0 © Adis International Limited. All rights reserved. Characteristics of Track Cycling Neil P. Craig1 and Kevin I. Norton2 1 Australian Institute of Sport, Track Cycling Unit Adelaide, South Australia, Australia 2 School of Physical Education, Exercise and Sport Studies, University of South Australia, Adelaide, South Australia, Australia Contents Abstract . 457 1. Track Cycling Events . 458 1.1 Energetics of Track Events . 458 2. Physical and Physiological Characteristics of Track Cyclists . 459 2.1 Body Shape, Size and Composition . 459 2.2 Maximal Oxygen Consumption . 461 2.3 Blood Lactate Transition Thresholds . 461 2.4 Anaerobic Capacity . 461 3. Competition Power Output . 462 3.1 200m Sprint . 462 3.2 1000m Time Trial . 463 3.3 4000m Team Pursuit . 463 3.4 4000m Individual Pursuit . 464 3.5 Madison . 464 4. Programme Design and Monitoring . 465 5. Conclusion . 466 Abstract Track cycling events range from a 200m flying sprint (lasting 10 to 11 seconds) to the 50km points race (lasting ≈1 hour). Unlike road cycling competitions where most racing is undertaken at submaximal power outputs, the shorter track events require the cyclist to tax maximally both the aerobic and anaerobic (oxygen independent) metabolic pathways. Elite track cyclists possess key physical and physiological attributes which are matched to the specific requirements of their events: these cyclists must have the appropriate genetic predisposition which is then maximised through effective training interventions. With advances in tech- nology it is now possible to accurately measure both power supply and demand variables under competitive conditions. -

Gear Up! Reviews: Ortlieb Vario & Carradice Backpack Panniers
WS E VI E R Bikes • Accessories • Kit Submit a review If you want to submit a review, write or email the editor – details on page 88 – Gear up! for advice on how to go about it. Each one printed wins a boxed set of three A cross-section of cycling products selected Cassini historical maps of the area of your choice. To see the whole range, and reviewed by CTC staff, specialist visit www.cassinimaps.com. To order by journalists and CTC members phone, call 0845 458 9910. BACKPACK PANNIERS £50 & £110 Reviewed by Technical Editor Chris Juden The Ortlieb Vario (near right) and Carradice Carradry Rucksack Pannier (far right) are the latest answers to a need that’s as old as the bicycle pannier. We all know that wheels make things easier to move, but normal panniers are awkward things to carry off the bike, which is one reason so many people pedal under the burden of a rucksack these days. That may be bearable for small amounts of luggage or distance, but not if you have lots to carry and it's more than a couple of miles to work or the shops. As for holidays: of course you’ll not want anything to detract from the pleasure of cycling – but if you also want to do a bit of serious hiking, on your back the load must go! Local errands and the bike-hike mix have similar but not two external sleeves (e.g. for bike bottles) and an internal identical demands, which play to the different strengths document pocket. -

Rotation: Moment of Inertia and Torque
Rotation: Moment of Inertia and Torque Every time we push a door open or tighten a bolt using a wrench, we apply a force that results in a rotational motion about a fixed axis. Through experience we learn that where the force is applied and how the force is applied is just as important as how much force is applied when we want to make something rotate. This tutorial discusses the dynamics of an object rotating about a fixed axis and introduces the concepts of torque and moment of inertia. These concepts allows us to get a better understanding of why pushing a door towards its hinges is not very a very effective way to make it open, why using a longer wrench makes it easier to loosen a tight bolt, etc. This module begins by looking at the kinetic energy of rotation and by defining a quantity known as the moment of inertia which is the rotational analog of mass. Then it proceeds to discuss the quantity called torque which is the rotational analog of force and is the physical quantity that is required to changed an object's state of rotational motion. Moment of Inertia Kinetic Energy of Rotation Consider a rigid object rotating about a fixed axis at a certain angular velocity. Since every particle in the object is moving, every particle has kinetic energy. To find the total kinetic energy related to the rotation of the body, the sum of the kinetic energy of every particle due to the rotational motion is taken. The total kinetic energy can be expressed as .. -

Rear Derailleur
(English) DM-RD0004-08 Dealer's Manual ROAD MTB Trekking City Touring/ URBAN SPORT E-BIKE Comfort Bike Rear Derailleur XTR RD-M9000 DEORE XT RD-M8000 CONTENTS IMPORTANT NOTICE .............................................................................................3 TO ENSURE SAFETY ...............................................................................................4 LIST OF TOOLS TO BE USED ..................................................................................6 INSTALLATION .......................................................................................................8 Installation of the rear derailleur ................................................................................................................8 ADJUSTMENT ......................................................................................................11 Stroke adjustment ......................................................................................................................................11 Installation of the chain .............................................................................................................................12 Securing the cable ......................................................................................................................................13 Using the end adjust bolt ..........................................................................................................................17 SIS adjustment ............................................................................................................................................18 -

Average Angular Velocity’ As the Solution This Problem and Discusses Some Applications Briefly
Average Angular Velocity Hanno Ess´en Department of Mechanics Royal Institute of Technology S-100 44 Stockholm, Sweden 1992, December Abstract This paper addresses the problem of the separation of rota- tional and internal motion. It introduces the concept of average angular velocity as the moment of inertia weighted average of particle angular velocities. It extends and elucidates the concept of Jellinek and Li (1989) of separation of the energy of overall rotation in an arbitrary (non-linear) N-particle system. It gen- eralizes the so called Koenig’s theorem on the two parts of the kinetic energy (center of mass plus internal) to three parts: center of mass, rotational, plus the remaining internal energy relative to an optimally translating and rotating frame. Published in: European Journal of Physics 14, pp.201-205, (1993). arXiv:physics/0401146v1 [physics.class-ph] 28 Jan 2004 1 1 Introduction The motion of a rigid body is completely characterized by its (center of mass) translational velocity and its angular velocity which describes the rotational motion. Rotational motion as a phenomenon is, however, not restricted to rigid bodies and it is then a kinematic problem to define exactly what the rotational motion of the system is. This paper introduces the new concept of ‘average angular velocity’ as the solution this problem and discusses some applications briefly. The average angular velocity concept is closely analogous to the concept of center of mass velocity. For a system of particles the center of mass velocity is simply the mass weighted average of the particle velocities. In a similar way the average angular velocity is the moment of inertia weighted average of the angular velocities of the particle position vectors.