Nonautonomous Dynamical Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Category Theory for Autonomous and Networked Dynamical Systems
Discussion Category Theory for Autonomous and Networked Dynamical Systems Jean-Charles Delvenne Institute of Information and Communication Technologies, Electronics and Applied Mathematics (ICTEAM) and Center for Operations Research and Econometrics (CORE), Université catholique de Louvain, 1348 Louvain-la-Neuve, Belgium; [email protected] Received: 7 February 2019; Accepted: 18 March 2019; Published: 20 March 2019 Abstract: In this discussion paper we argue that category theory may play a useful role in formulating, and perhaps proving, results in ergodic theory, topogical dynamics and open systems theory (control theory). As examples, we show how to characterize Kolmogorov–Sinai, Shannon entropy and topological entropy as the unique functors to the nonnegative reals satisfying some natural conditions. We also provide a purely categorical proof of the existence of the maximal equicontinuous factor in topological dynamics. We then show how to define open systems (that can interact with their environment), interconnect them, and define control problems for them in a unified way. Keywords: ergodic theory; topological dynamics; control theory 1. Introduction The theory of autonomous dynamical systems has developed in different flavours according to which structure is assumed on the state space—with topological dynamics (studying continuous maps on topological spaces) and ergodic theory (studying probability measures invariant under the map) as two prominent examples. These theories have followed parallel tracks and built multiple bridges. For example, both have grown successful tools from the interaction with information theory soon after its emergence, around the key invariants, namely the topological entropy and metric entropy, which are themselves linked by a variational theorem. The situation is more complex and heterogeneous in the field of what we here call open dynamical systems, or controlled dynamical systems. -

Topological Entropy and Distributional Chaos in Hereditary Shifts with Applications to Spacing Shifts and Beta Shifts
DISCRETE AND CONTINUOUS doi:10.3934/dcds.2013.33.2451 DYNAMICAL SYSTEMS Volume 33, Number 6, June 2013 pp. 2451{2467 TOPOLOGICAL ENTROPY AND DISTRIBUTIONAL CHAOS IN HEREDITARY SHIFTS WITH APPLICATIONS TO SPACING SHIFTS AND BETA SHIFTS Dedicated to the memory of Professor Andrzej Pelczar (1937-2010). Dominik Kwietniak Faculty of Mathematics and Computer Science Jagiellonian University in Krak´ow ul.Lojasiewicza 6, 30-348 Krak´ow,Poland (Communicated by Llu´ısAlsed`a) Abstract. Positive topological entropy and distributional chaos are charac- terized for hereditary shifts. A hereditary shift has positive topological entropy if and only if it is DC2-chaotic (or equivalently, DC3-chaotic) if and only if it is not uniquely ergodic. A hereditary shift is DC1-chaotic if and only if it is not proximal (has more than one minimal set). As every spacing shift and every beta shift is hereditary the results apply to those classes of shifts. Two open problems on topological entropy and distributional chaos of spacing shifts from an article of Banks et al. are solved thanks to this characterization. Moreover, it is shown that a spacing shift ΩP has positive topological entropy if and only if N n P is a set of Poincar´erecurrence. Using a result of Kˇr´ıˇzan example of a proximal spacing shift with positive entropy is constructed. Connections between spacing shifts and difference sets are revealed and the methods of this paper are used to obtain new proofs of some results on difference sets. 1. Introduction. A hereditary shift is a (one-sided) subshift X such that x 2 X and y ≤ x (coordinate-wise) imply y 2 X. -

Topological Dynamics of Ordinary Differential Equations and Kurzweil Equations*
CORE Metadata, citation and similar papers at core.ac.uk Provided by Elsevier - Publisher Connector JOURNAL OF DIFFERENTIAL EQUATIONS 23, 224-243 (1977) Topological Dynamics of Ordinary Differential Equations and Kurzweil Equations* ZVI ARTSTEIN Lefschetz Center for Dynamical Systems, Division of Applied Mathematics, Brown University, Providence, Rhode Island 02912 Received March 25, 1975; revised September 4, 1975 1. INTRODUCTION A basic construction in applying topological dynamics to nonautonomous ordinary differential equations f =f(x, s) is to consider limit points (when 1 t 1 + co) of the translatesf, , wheref,(x, s) = f(~, t + s). A limit point defines a limiting equation and there is a tight relation- ship between the behavior of solutions of the original equation and of the limiting equations (see [l&13]). I n order to carry out this construction one has to specify the meaning of the convergence of ft , and this convergence has to have certain properties which we shall discuss later. In this paper we shall encounter a phenomenon which seems to be new in the context of applications of topological dynamics. The limiting equations will not be ordinary differential equations. We shall work under assumptions that do not guarantee that the space of ordinary equations is complete and we shall have to consider a completion of the space. Almost two decades ago Kurzweil [3] introduced what he called generalized ordinary differential equations and what we call Kurzweil equations. We shall see that if we embed our ordinary equations in a space of Kurzweil equations we get a complete and compact space, and the techniques of topological dynamics can be applied. -

Solution Bounds, Stability and Attractors' Estimates of Some Nonlinear Time-Varying Systems
1 Solution Bounds, Stability and Attractors’ Estimates of Some Nonlinear Time-Varying Systems Mark A. Pinsky and Steve Koblik Abstract. Estimation of solution norms and stability for time-dependent nonlinear systems is ubiquitous in numerous applied and control problems. Yet, practically valuable results are rare in this area. This paper develops a novel approach, which bounds the solution norms, derives the corresponding stability criteria, and estimates the trapping/stability regions for a broad class of the corresponding systems. Our inferences rest on deriving a scalar differential inequality for the norms of solutions to the initial systems. Utility of the Lipschitz inequality linearizes the associated auxiliary differential equation and yields both the upper bounds for the norms of solutions and the relevant stability criteria. To refine these inferences, we introduce a nonlinear extension of the Lipschitz inequality, which improves the developed bounds and estimates the stability basins and trapping regions for the corresponding systems. Finally, we conform the theoretical results in representative simulations. Key Words. Comparison principle, Lipschitz condition, stability criteria, trapping/stability regions, solution bounds AMS subject classification. 34A34, 34C11, 34C29, 34C41, 34D08, 34D10, 34D20, 34D45 1. INTRODUCTION. We are going to study a system defined by the equation n (1) xAtxftxFttt , , [0 , ), x , ft ,0 0 where matrix A nn and functions ft:[ , ) nn and F : n are continuous and bounded, and At is also continuously differentiable. It is assumed that the solution, x t, x0 , to the initial value problem, x t0, x 0 x 0 , is uniquely defined for tt0 . Note that the pertained conditions can be found, e.g., in [1] and [2]. -

Strange Attractors and Classical Stability Theory
Nonlinear Dynamics and Systems Theory, 8 (1) (2008) 49–96 Strange Attractors and Classical Stability Theory G. Leonov ∗ St. Petersburg State University Universitetskaya av., 28, Petrodvorets, 198504 St.Petersburg, Russia Received: November 16, 2006; Revised: December 15, 2007 Abstract: Definitions of global attractor, B-attractor and weak attractor are introduced. Relationships between Lyapunov stability, Poincare stability and Zhukovsky stability are considered. Perron effects are discussed. Stability and instability criteria by the first approximation are obtained. Lyapunov direct method in dimension theory is introduced. For the Lorenz system necessary and sufficient conditions of existence of homoclinic trajectories are obtained. Keywords: Attractor, instability, Lyapunov exponent, stability, Poincar´esection, Hausdorff dimension, Lorenz system, homoclinic bifurcation. Mathematics Subject Classification (2000): 34C28, 34D45, 34D20. 1 Introduction In almost any solid survey or book on chaotic dynamics, one encounters notions from classical stability theory such as Lyapunov exponent and characteristic exponent. But the effect of sign inversion in the characteristic exponent during linearization is seldom mentioned. This effect was discovered by Oscar Perron [1], an outstanding German math- ematician. The present survey sets forth Perron’s results and their further development, see [2]–[4]. It is shown that Perron effects may occur on the boundaries of a flow of solutions that is stable by the first approximation. Inside the flow, stability is completely determined by the negativeness of the characteristic exponents of linearized systems. It is often said that the defining property of strange attractors is the sensitivity of their trajectories with respect to the initial data. But how is this property connected with the classical notions of instability? For continuous systems, it was necessary to remember the almost forgotten notion of Zhukovsky instability. -

Chapter 8 Stability Theory
Chapter 8 Stability theory We discuss properties of solutions of a first order two dimensional system, and stability theory for a special class of linear systems. We denote the independent variable by ‘t’ in place of ‘x’, and x,y denote dependent variables. Let I ⊆ R be an interval, and Ω ⊆ R2 be a domain. Let us consider the system dx = F (t, x, y), dt (8.1) dy = G(t, x, y), dt where the functions are defined on I × Ω, and are locally Lipschitz w.r.t. variable (x, y) ∈ Ω. Definition 8.1 (Autonomous system) A system of ODE having the form (8.1) is called an autonomous system if the functions F (t, x, y) and G(t, x, y) are constant w.r.t. variable t. That is, dx = F (x, y), dt (8.2) dy = G(x, y), dt Definition 8.2 A point (x0, y0) ∈ Ω is said to be a critical point of the autonomous system (8.2) if F (x0, y0) = G(x0, y0) = 0. (8.3) A critical point is also called an equilibrium point, a rest point. Definition 8.3 Let (x(t), y(t)) be a solution of a two-dimensional (planar) autonomous system (8.2). The trace of (x(t), y(t)) as t varies is a curve in the plane. This curve is called trajectory. Remark 8.4 (On solutions of autonomous systems) (i) Two different solutions may represent the same trajectory. For, (1) If (x1(t), y1(t)) defined on an interval J is a solution of the autonomous system (8.2), then the pair of functions (x2(t), y2(t)) defined by (x2(t), y2(t)) := (x1(t − s), y1(t − s)), for t ∈ s + J (8.4) is a solution on interval s + J, for every arbitrary but fixed s ∈ R. -
Robot Dynamics and Control Lecture 8: Basic Lyapunov Stability Theory
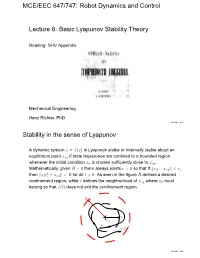
MCE/EEC 647/747: Robot Dynamics and Control Lecture 8: Basic Lyapunov Stability Theory Reading: SHV Appendix Mechanical Engineering Hanz Richter, PhD MCE503 – p.1/17 Stability in the sense of Lyapunov A dynamic system x˙ = f(x) is Lyapunov stable or internally stable about an equilibrium point xeq if state trajectories are confined to a bounded region whenever the initial condition x0 is chosen sufficiently close to xeq. Mathematically, given R> 0 there always exists r > 0 so that if ||x0 − xeq|| <r, then ||x(t) − xeq|| <R for all t> 0. As seen in the figure R defines a desired confinement region, while r defines the neighborhood of xeq where x0 must belong so that x(t) does not exit the confinement region. R r xeq x0 x(t) MCE503 – p.2/17 Stability in the sense of Lyapunov... Note: Lyapunov stability does not require ||x(t)|| to converge to ||xeq||. The stronger definition of asymptotic stability requires that ||x(t)|| → ||xeq|| as t →∞. Input-Output stability (BIBO) does not imply Lyapunov stability. The system can be BIBO stable but have unbounded states that do not cause the output to be unbounded (for example take x1(t) →∞, with y = Cx = [01]x). The definition is difficult to use to test the stability of a given system. Instead, we use Lyapunov’s stability theorem, also called Lyapunov’s direct method. This theorem is only a sufficient condition, however. When the test fails, the results are inconclusive. It’s still the best tool available to evaluate and ensure the stability of nonlinear systems. -

Groups and Topological Dynamics Volodymyr Nekrashevych
Groups and topological dynamics Volodymyr Nekrashevych E-mail address: [email protected] 2010 Mathematics Subject Classification. Primary ... ; Secondary ... Key words and phrases. .... The author ... Abstract. ... Contents Chapter 1. Dynamical systems 1 x1.1. Introduction by examples 1 x1.2. Subshifts 21 x1.3. Minimal Cantor systems 36 x1.4. Hyperbolic dynamics 74 x1.5. Holomorphic dynamics 103 Exercises 111 Chapter 2. Group actions 117 x2.1. Structure of orbits 117 x2.2. Localizable actions and Rubin's theorem 136 x2.3. Automata 149 x2.4. Groups acting on rooted trees 163 Exercises 193 Chapter 3. Groupoids 201 x3.1. Basic definitions 201 x3.2. Actions and correspondences 214 x3.3. Fundamental groups 233 x3.4. Orbispaces and complexes of groups 238 x3.5. Compactly generated groupoids 243 x3.6. Hyperbolic groupoids 252 Exercises 252 iii iv Contents Chapter 4. Iterated monodromy groups 255 x4.1. Iterated monodromy groups of self-coverings 255 x4.2. Self-similar groups 265 x4.3. General case 274 x4.4. Expanding maps and contracting groups 291 x4.5. Thurston maps and related structures 311 x4.6. Iterations of polynomials 333 x4.7. Functoriality 334 Exercises 340 Chapter 5. Groups from groupoids 345 x5.1. Full groups 345 x5.2. AF groupoids 364 x5.3. Homology of totally disconnected ´etalegroupoids 371 x5.4. Almost finite groupoids 378 x5.5. Bounded type 380 x5.6. Torsion groups 395 x5.7. Fragmentations of dihedral groups 401 x5.8. Purely infinite groupoids 423 Exercises 424 Chapter 6. Growth and amenability 427 x6.1. Growth of groups 427 x6.2. -

Analysis of ODE Models
Analysis of ODE Models P. Howard Fall 2009 Contents 1 Overview 1 2 Stability 2 2.1 ThePhasePlane ................................. 5 2.2 Linearization ................................... 10 2.3 LinearizationandtheJacobianMatrix . ...... 15 2.4 BriefReviewofLinearAlgebra . ... 20 2.5 Solving Linear First-Order Systems . ...... 23 2.6 StabilityandEigenvalues . ... 28 2.7 LinearStabilitywithMATLAB . .. 35 2.8 Application to Maximum Sustainable Yield . ....... 37 2.9 Nonlinear Stability Theorems . .... 38 2.10 Solving ODE Systems with matrix exponentiation . ......... 40 2.11 Taylor’s Formula for Functions of Multiple Variables . ............ 44 2.12 ProofofPart1ofPoincare–Perron . ..... 45 3 Uniqueness Theory 47 4 Existence Theory 50 1 Overview In these notes we consider the three main aspects of ODE analysis: (1) existence theory, (2) uniqueness theory, and (3) stability theory. In our study of existence theory we ask the most basic question: are the ODE we write down guaranteed to have solutions? Since in practice we solve most ODE numerically, it’s possible that if there is no theoretical solution the numerical values given will have no genuine relation with the physical system we want to analyze. In our study of uniqueness theory we assume a solution exists and ask if it is the only possible solution. If we are solving an ODE numerically we will only get one solution, and if solutions are not unique it may not be the physically interesting solution. While it’s standard in advanced ODE courses to study existence and uniqueness first and stability 1 later, we will start with stability in these note, because it’s the one most directly linked with the modeling process. -

Dynamical Systems and Ergodic Theory
MATH36206 - MATHM6206 Dynamical Systems and Ergodic Theory Teaching Block 1, 2017/18 Lecturer: Prof. Alexander Gorodnik PART III: LECTURES 16{30 course web site: people.maths.bris.ac.uk/∼mazag/ds17/ Copyright c University of Bristol 2010 & 2016. This material is copyright of the University. It is provided exclusively for educational purposes at the University and is to be downloaded or copied for your private study only. Chapter 3 Ergodic Theory In this last part of our course we will introduce the main ideas and concepts in ergodic theory. Ergodic theory is a branch of dynamical systems which has strict connections with analysis and probability theory. The discrete dynamical systems f : X X studied in topological dynamics were continuous maps f on metric spaces X (or more in general, topological→ spaces). In ergodic theory, f : X X will be a measure-preserving map on a measure space X (we will see the corresponding definitions below).→ While the focus in topological dynamics was to understand the qualitative behavior (for example, periodicity or density) of all orbits, in ergodic theory we will not study all orbits, but only typical1 orbits, but will investigate more quantitative dynamical properties, as frequencies of visits, equidistribution and mixing. An example of a basic question studied in ergodic theory is the following. Let A X be a subset of O+ ⊂ the space X. Consider the visits of an orbit f (x) to the set A. If we consider a finite orbit segment x, f(x),...,f n−1(x) , the number of visits to A up to time n is given by { } Card 0 k n 1, f k(x) A . -

Topological Dynamics: a Survey
Topological Dynamics: A Survey Ethan Akin Mathematics Department The City College 137 Street and Convent Avenue New York City, NY 10031, USA September, 2007 Topological Dynamics: Outline of Article Glossary I Introduction and History II Dynamic Relations, Invariant Sets and Lyapunov Functions III Attractors and Chain Recurrence IV Chaos and Equicontinuity V Minimality and Multiple Recurrence VI Additional Reading VII Bibliography 1 Glossary Attractor An invariant subset for a dynamical system such that points su±ciently close to the set remain close and approach the set in the limit as time tends to in¯nity. Dynamical System A model for the motion of a system through time. The time variable is either discrete, varying over the integers, or continuous, taking real values. Our systems are deterministic, rather than stochastic, so the the future states of the system are functions of the past. Equilibrium An equilibrium, or a ¯xed point, is a point which remains at rest for all time. Invariant Set A subset is invariant if the orbit of each point of the set remains in the set at all times, both positive and negative. The set is + invariant, or forward invariant, if the forward orbit of each such point remains in the set. Lyapunov Function A continuous, real-valued function on the state space is a Lyapunov function when it is non-decreasing on each orbit as time moves forward. Orbit The orbit of an initial position is the set of points through which the system moves as time varies positively and negatively through all values. The forward orbit is the subset associated with positive times. -

THE DYNAMICAL SYSTEMS APPROACH to DIFFERENTIAL EQUATIONS INTRODUCTION the Mathematical Subject We Call Dynamical Systems Was
BULLETIN (New Series) OF THE AMERICAN MATHEMATICAL SOCIETY Volume 11, Number 1, July 1984 THE DYNAMICAL SYSTEMS APPROACH TO DIFFERENTIAL EQUATIONS BY MORRIS W. HIRSCH1 This harmony that human intelligence believes it discovers in nature —does it exist apart from that intelligence? No, without doubt, a reality completely independent of the spirit which conceives it, sees it or feels it, is an impossibility. A world so exterior as that, even if it existed, would be forever inaccessible to us. But what we call objective reality is, in the last analysis, that which is common to several thinking beings, and could be common to all; this common part, we will see, can be nothing but the harmony expressed by mathematical laws. H. Poincaré, La valeur de la science, p. 9 ... ignorance of the roots of the subject has its price—no one denies that modern formulations are clear, elegant and precise; it's just that it's impossible to comprehend how any one ever thought of them. M. Spivak, A comprehensive introduction to differential geometry INTRODUCTION The mathematical subject we call dynamical systems was fathered by Poin caré, developed sturdily under Birkhoff, and has enjoyed a vigorous new growth for the last twenty years. As I try to show in Chapter I, it is interesting to look at this mathematical development as the natural outcome of a much broader theme which is as old as science itself: the universe is a sytem which changes in time. Every mathematician has a particular way of thinking about mathematics, but rarely makes it explicit.