A Project-Based Undergraduate Aerospace Sequence, with Embedded Computational Intelligence
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Aerospace Engine Data
AEROSPACE ENGINE DATA Data for some concrete aerospace engines and their craft ................................................................................. 1 Data on rocket-engine types and comparison with large turbofans ................................................................... 1 Data on some large airliner engines ................................................................................................................... 2 Data on other aircraft engines and manufacturers .......................................................................................... 3 In this Appendix common to Aircraft propulsion and Space propulsion, data for thrust, weight, and specific fuel consumption, are presented for some different types of engines (Table 1), with some values of specific impulse and exit speed (Table 2), a plot of Mach number and specific impulse characteristic of different engine types (Fig. 1), and detailed characteristics of some modern turbofan engines, used in large airplanes (Table 3). DATA FOR SOME CONCRETE AEROSPACE ENGINES AND THEIR CRAFT Table 1. Thrust to weight ratio (F/W), for engines and their crafts, at take-off*, specific fuel consumption (TSFC), and initial and final mass of craft (intermediate values appear in [kN] when forces, and in tonnes [t] when masses). Engine Engine TSFC Whole craft Whole craft Whole craft mass, type thrust/weight (g/s)/kN type thrust/weight mini/mfin Trent 900 350/63=5.5 15.5 A380 4×350/5600=0.25 560/330=1.8 cruise 90/63=1.4 cruise 4×90/5000=0.1 CFM56-5A 110/23=4.8 16 -

Spacecraft American Aerospace Controls
Spacecraft For More Than 50 Years, Our Experience Is Your Assurance™ AAC Manufactures high-reliability voltage and current sensors for: Satellites UAVs Commercial Aircraft Missiles Underwater Vehicles Military Aircraft Launch Systems Armored Vehicles Ships Helicopters Industrial Equipment Rail AAC is a Woman-Owned Business and all parts are manufactured at AAC’s Farmingdale, NY location. American Aerospace Controls 570 Smith Street, Farmingdale NY 11735 Phone: +1 (631) 694-5100 – Fax: +1 (631) 694-6739 http://a-a-c.com ©American Aerospace Controls 10-2016 Aircraft-UAVs Rail AAC Quality and Engineering Industrial Defense For More Than 50 Years, Our Experience is Your Assurance™ AAC Engineering and Quality Depart- Since 1965, American Aerospace Controls has been manufacturing high reliability ments are here to work with you on the AC & DC current, voltage and frequency sensors, transducers and detectors. With design and qualification of your parts. an emphasis on engineering solutions and customer support, AAC has developed Our vast experience in space flight app- long-term relationships with some of the largest aerospace, defense, transit and industrial companies around the globe. lications allows us to offer insight into the design and requirements of each unique Space Application. AAC main- AAC in Space tains the highest standards in Quality and Production. AAC sensors have been used on numerous manned and unmanned spacecraft, satellite, rocket and Unmanned Aerial Vehicle (UAV) programs. AAC has been involved with space flight applications since the mid-1960s. AAC’s extensive From the Mercury Program in the 1960’s to today’s international commercial and knowledge and decades of experience in designing and manufacturing defense satellite systems, AAC engineers have helped design current and voltage transducers and detectors capable of providing high reliability in harsh remote detectors and transducers that are the best available. -

Aerospace Manufacturing a Growth Leader in Georgia
Aerospace Manufacturing A Growth Leader in Georgia In this study: 9. Research Universities 10. GTRI and GTMI 1. Industry Snapshot 11. High-Tech Talent 3. A Top Growth Leader 12. Centers of Innovation 4. Industry Mix 13. World-Class Training Programs 6. Industry Wages and Occupational 15. Strong Partnerships and Ready Workforce Employment 16. Transportation Infrastructure 7. Pro-Business State 17. Powering Your Manufacturing Facility Community and Economic Development 8. Unionization 18. Aerospace Companies Aerospace Manufacturing A Growth Leader in Georgia Aerospace is defined as Aerospace Products and Parts Manufacturing as well as Other Support Activities for Air Transportation. Aerospace Georgia is the ideal home for aerospace include Pratt & Whitney’s expansion in companies with ¨¦§75 ¨¦§575 25+ employees companies. With the world’s most traveled Columbus in both 2016 and 2017, Meggitt «¬400 ¨¦§85 ¨¦§985 airport, eight regional airports, prominent Polymers & Composites’ expansion in military bases and accessibility to the Rockmart and MSB Group’s location in ¨¦§20 ¨¦§20 country’s fastest-growing major port, Savannah. For a complete list of new major ¨¦§85 Georgia’s aerospace industry serves a locations and expansions, see page 2. ¨¦§185 global marketplace. Georgia is also home to a highly-skilled workforce and world- ¨¦§16 Why Georgia for Aerospace? class technical expertise geared toward promoting the success of the aerospace • Highly skilled workers ¨¦§75 ¨¦§95 industry. Georgia’s business climate is • World-class technical expertise consistently ranked as one of the best • Renowned workforce training program in the country, with a business-friendly tax code and incentives that encourage • Increasing number of defense manufacturing growth for existing and personnel newly arriving companies. -

Micro-Jet Test Facility for Aerospace Propulsión Engineering Education*
Micro-Jet Test Facility for Aerospace Propulsión Engineering Education* G. L. JUSTE, J. L. MONTAÑÉS and A. VELAZQUEZ Universidad Politécnica de Madrid, School of Aeronautics, Aerospace Propulsión and Fluid Mechanics Department, Plaza del Cardenal Cisneros 3, 28040 Madrid, Spain. E-mail: [email protected] This paper describes the methodology that has been developed and implemented at the School of Aeronautics (ETSIA) of the Universidad Politécnica de Madrid (UPM) to familiarize aerospace engineering students with the operation ofreal complexjet engine systems. This methodology has a two-pronged approach: students carry out preparatory work by using, first, a gas turbine performance prediction numerical code; then they valídate their assumptions and results on an experimental test rig. When looking at the educational aspects, we have taken care that, apartfrom being sufficiently robust and flexible, the experimental set-up is similar to real jet engine rigs, so the students are not constrained to exploring a much too limited parametric space. Also, because a facility like this is usually subject to extensive and somewhat rugged use, we have focused on a low cosí design. Keywords: micro-jet engine test facility; aerospace propulsión INTRODUCTION should be considered: (1) a comprehensive under standing of these systems is based on acquiring AEROSPACE ENGINEERING EDUCATION theoretical, computational and experimental test in Europe is undergoing a significant change for knowledge, and (2) the cost of a jet engine experi two reasons: (1) the aerospace industry, which mental facility is too high for many public univer- used to be a mostly national concern, is now sities, not to mention the environmental aspects consolidating at the continental level, and (2) a associated with the fact that some of these institu- common frame of engineering education is devel- tions, like ours, are located in downtown áreas. -

A Case Study of Evolvability and Excess on the B-52 Stratofortress and F/A-18 Hornet
ASME 2017 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference IDETC 2017 August 6-9, 2017, Cleveland, Ohio IDETC2017-67886 A CASE STUDY OF EVOLVABILITY AND EXCESS ON THE B-52 STRATOFORTRESS AND F/A-18 HORNET Daniel Long Dr. Scott Ferguson1 Graduate Research Assistant Associate Professor North Carolina State University North Carolina State University Raleigh, NC, USA Raleigh, NC, USA [email protected] [email protected] ABSTRACT operate for 60 years, yet there is speculation that they The moment a system is put into service it begins to lose value ultimately could operate for eighty to one hundred years [2]. as technological and societal changes accrue while the system The total cost of building a replacement unit in 2009 was is frozen in the state it was constructed. System decision estimated at $7 billion per unit excluding transmission [3], makers are faced with the choice of accepting a decline in which was a nontrivial fraction of the then $53.5 billion market performance, updating the design, or retiring the system. Each cap for Duke Energy, the largest utility in the US [4]. time a decision maker faces these alternatives, the value of the A variety of methods for increasing CES lifecycle value available options must be evaluated to determine the preferred have been explored in literature. Design for: adaptability [5], course of action. A design that can adapt to changes with flexibility [6,7], changeability [8,9], and reconfigurability [10] minimal cost should provide more value over a longer period all provide system designers with heuristics and tools to design than a system that is initially less costly, but less adaptable. -

Innovation in Space Exploration
COLLINS AEROSPACE Collins Aerospace has played a role in many of NASA’s most significant milestones. This heritage of innovation continues as we build systems to INNOVATION IN serve the next generation of space exploration. History of space innovation SPACE EXPLORATION Collins Aerospace has been enabling life and communications in space for more than 50 years. 1960s present PROJECTS MERCURY PROJECT APOLLO SKYLAB SPACE SHUTTLE INTERNATIONAL SPACE AND GEMINI STATION Developed the Transmitted voice Utilized our Provided voice, spacesuit and audio/ and data with Collins extravehicular mobility Continue to enable a telemetry and precision video technology for communication unit (EMU) during habitable environment tracking data our first steps on the technology satellite deployment for the crew with moon; Earth-based and retrieval/ our environmental communications/ maintenance; and our control and life support tracking network; avionics during landing systems; our EMUs radio, data and supported assembly communications; and in 2000 life support technology collinsaerospace.com/space A continuing legacy of exploration THE EXTRAVEHICULAR MOBILITY UNIT (EMU) IS CONSIDERED THE WORLD’S SMALLEST SPACECRAFT MARS ROVER The EMU can protect astronauts in Since 2003, we have provided multiple lens designs temperatures ranging from -250° F and assemblies for the Mars Rover cameras at the to 250° F (-156° C to 121° C). Jet Propulsion Laboratory (JPL). Lens assemblies were also used as part of the JunoCam for the The EMU protects astronauts from Jupiter mission. micrometeoroids traveling up to 17,000 mph [27,358 km/h]. SPACE WHEELS The EMU weighs approximately 275 lbs. [125 kg] and contains more than 18,000 Our space wheel technology has accumulated more parts. -
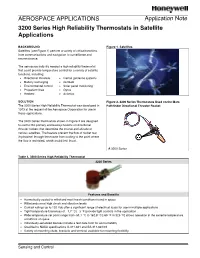
3200 Series in Satellite Applications
AEROSPACE APPLICATIONS Application Note 3200 Series High Reliability Thermostats in Satellite Applications BACKGROUND Figure 1. Satellites Satellites (see Figure 1) perform a variety of critical functions, from communications and navigation to surveillance and reconnaisance. The aerospace industry needed a high reliability thermostat that could provide temperature control for a variety of satellite functions, including: • Directional thrusters • Inertial guidance systems • Battery recharging • Gimbals • Environmental control • Solar panel monitoring • Propellant lines • Gyros • Heaters • Avionics SOLUTION Figure 2. 3200 Series Thermostats Used on the Mars The 3200 Series High Reliability Thermostat was developed in Pathfinder Directional Thruster Rocket 1979 at the request of the Aerospace Corporation for use in these applications. The 3200 Series thermostats shown in Figure 2 are designed to control the primary and backup heaters on directional thruster rockets that determine the course and altitude of various satellites. The heaters prevent the flow of rocket fuel (hydrazine) through the nozzle from cooling to the point where the flow is restricted, which would limit thrust. A 3200 Series Table 1. 3200 Series High Reliability Thermostat 3200 Series Features and Benefits • Hermetically sealed to withstand most harsh conditions found in space • Withstands most high shock and vibration levels • Contact ratings up to 120 Vdc offer a significant range of electrical loads for use in multiple applications • Tight temperature tolerances of -

The National Aerospace Plane Program: a Revolutionary Concept
ROBERT R. BARTHELEMY THE NATIONAL AEROSPACE PLANE PROGRAM: A REVOLUTIONARY CONCEPT The National AeroSpace Plane program is aimed at developing and demonstrating hypersonic tech nologies with the goal of achieving orbit with a single-stage vehicle. This article describes the technologi cal, programmatic, utilitarian, and conceptual aspects of the program. INTRODUCTION The National AeroSpace Plane (NASP) is a look into The NASP demonstration aircraft, the X-30 (Fig. 1), the future. It is a vision of the ultimate airplane, one will reach speeds of Mach 25, eight times faster than has capable of flying at speeds greater than 17,000 miles per ever been achieved with airbreathing aircraft. As it flies hour, twenty-five times the speed of sound. It is the at through the atmosphere from subsonic speeds to orbital tainment of a vehicle that can routinely fly from Earth velocities (Mach 25), its structure will be subjected to to space and back, from conventional airfields, in afford average temperatures well beyond anything ever achieved able ways. It represents the achievement of major tech in aircraft. While rocket-powered space vehicles like the nological breakthroughs that will have an enormous im shuttle minimize their trajectories through the atmo pact on the future growth of this nation. It is more than sphere, the X-30 will linger in the atmosphere in order a national aircraft development program, more than the to use the air as the oxidizer for its ramjet and scramjet synergy of revolutionary technologies, more than a capa engines. The NASP aircraft must use liquid or slush bility that may change the way we move through the hydrogen as its fuel, which will present new challenges world and the aerospace around it. -

Aircraft Technology Roadmap to 2050 | IATA
Aircraft Technology Roadmap to 2050 NOTICE DISCLAIMER. The information contained in this publication is subject to constant review in the light of changing government requirements and regulations. No subscriber or other reader should act on the basis of any such information without referring to applicable laws and regulations and/or without taking appropriate professional advice. Although every effort has been made to ensure accuracy, the International Air Transport Association shall not be held responsible for any loss or damage caused by errors, omissions, misprints or misinterpretation of the contents hereof. Furthermore, the International Air Transport Association expressly disclaims any and all liability to any person or entity, whether a purchaser of this publication or not, in respect of anything done or omitted, and the consequences of anything done or omitted, by any such person or entity in reliance on the contents of this publication. © International Air Transport Association. All Rights Reserved. No part of this publication may be reproduced, recast, reformatted or transmitted in any form by any means, electronic or mechanical, including photocopying, recording or any information storage and retrieval system, without the prior written permission from: Senior Vice President Member & External Relations International Air Transport Association 33, Route de l’Aéroport 1215 Geneva 15 Airport Switzerland Table of Contents Table of Contents .............................................................................................................................................................................................................. -

Introduction to Aerospace and Aviation PEIMS Code: N1304672 Abbreviation: INTAEAVI Grade Level(S): 9–11 Award of Credit: 1.0
Introduction to Aerospace and Aviation PEIMS Code: N1304672 Abbreviation: INTAEAVI Grade Level(s): 9–11 Award of Credit: 1.0 Approved Innovative Course • Districts must have local board approval to implement innovative courses. • In accordance with Texas Administrative Code (TAC) §74.27, school districts must provide instruction in all essential knowledge and skills identified in this innovative course. • Innovative courses may only satisfy elective credit toward graduation requirements. • Please refer to TAC §74.13 for guidance on endorsements. Course Description: The Introduction to Aerospace and Aviation course will provide the foundation for advanced exploration in the areas of professional pilot, aerospace engineering, and unmanned aircraft systems. Students will learn about the history of aviation, from Leonardo da Vinci’s ideas about flight to the Wright brothers and the space race. Along the way students will learn about the innovations and technological developments that have made today’s aviation and aerospace industries possible. The course includes engineering practices, the design process, aircraft structure, space vehicles past and present, and a look toward future space exploration. Students will also learn about the wide variety of exciting and rewarding careers available to them. The Introduction to Aerospace and Aviation course will inspire students to consider aviation and other aerospace careers while laying the foundation for continued study in grades 10-12. Essential Knowledge and Skills: (a) General Requirements: This course is recommended for students in grade 9-11. Students shall be awarded one credit for successful completion of this course. (b) Introduction. (1) Career and technical education instruction provides content aligned with challenging academic standards and relevant technical knowledge and skills for students to further their education and succeed in current or emerging professions. -

Aerospace & Aviation Companies
Company List Aerospace & Aviation Companies May 2013 Note: Ordered alphabetically by company name. Company Name City County Parent Country Product Description 2AM Group LLC Duncan Spartanburg USA Headquarters (Corporate), third party logistics 2AM Group LLC Charleston Charleston USA Third party logistics 3D Systems Inc Rock Hill York USA Software for 3-D modeling & rapid prototyping, 3D printers AAI Corp Goose Creek Berkeley USA Flight simulators, training devices & training Action Research Corp (ARC) Greer Greenville USA Aerospace assembly & engineering,FAA/EASA repair services Acutec Precision Machining Inc St. Stephens Berkeley CNC Machining ADEX Machining Technologies Greenville Greenville Precision machined components & LLC assemblies Advanced Composite Materials Greer Spartanburg Silicon carbon whiskers, fibers and LLC ceramic products Aero Precision Products Summerville Dorchester USA Headquarters, manufactures aerospace ballscrews Aerospace Design Concepts Abbeville Abbeville Electrical engineering services, simulation & modeling AF Gloenco (Ameriforge) Greenville Greenville USA Forged products & services for aerospace & other industries AGY Holding Corp Aiken Aiken USA Headquarters,glass fiber products for wind, automotive & aerospace industries AID Company Westminster Oconee USA Manufactures precision aerospace hardware Aircraft Maintenance Services IncCamden Kershaw FAA certified repair & inspection services Airflow Performance Inc Spartanburg Spartanburg Repair & overhaul of fuel injection systems Airline Container Leasing -

Picosatellites and Nanosatellites at the Aerospace Corporation
Picosatellites and Nanosatellites at The Aerospace Corporation In-Space Non-Destructive Inspection Technology Workshop Feb 29 – Mar 1, 2012 Johnson Space Center Houston, Tx David Hinkley and Brian Hardy The Aerospace Corporation [email protected] Copyright 2012, The Aerospace Corporation, All rights reserved 310-336-5211 © The Aerospace Corporation 2012 2 Outline • Past Missions and Experience – MEPSI Satellites – Aerocube Satellites – PSSC2 • Autonomous Inspector Technologies – Imaging Capability – Attitude Control – Propulsion System – De-orbit Capability Copyright 2012, The Aerospace Corporation, All rights reserved 3 The Aerospace Corporation Pico and Nanosatellites Copyright 2012, The Aerospace Corporation, All rights reserved 4 The Aerospace Corporation Pico and Nanosatellites AC4 1.2 kg 2010 2012 2014 PSSC2 3.5 kg Copyright 2012, The Aerospace Corporation, All rights reserved 5 2011 The Aerospace Corporation’s Picosat Capabilities • Design, build and operate miniature satellites (< 7 kg) • Average of 1 flight per year for last 10 years • Develop custom sensors • Sun sensor; Earth sensor; RAM sensor; Visible cameras • Develop custom capabilities • Cold gas propulsion system; De-orbit capability • Mature and capable bus • Robust with redundancies • Precision short-term tracking (< 1 degree precision) • High peak-power payloads (30W for 5 minutes in 1U form factor) • Strong organization • The Aerospace Corporation is a California nonprofit corporation that operates a Federally Funded Research and Development Center dedicated