6 Sound Measuring Instruments
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RANDOM VIBRATION—AN OVERVIEW by Barry Controls, Hopkinton, MA
RANDOM VIBRATION—AN OVERVIEW by Barry Controls, Hopkinton, MA ABSTRACT Random vibration is becoming increasingly recognized as the most realistic method of simulating the dynamic environment of military applications. Whereas the use of random vibration specifications was previously limited to particular missile applications, its use has been extended to areas in which sinusoidal vibration has historically predominated, including propeller driven aircraft and even moderate shipboard environments. These changes have evolved from the growing awareness that random motion is the rule, rather than the exception, and from advances in electronics which improve our ability to measure and duplicate complex dynamic environments. The purpose of this article is to present some fundamental concepts of random vibration which should be understood when designing a structure or an isolation system. INTRODUCTION Random vibration is somewhat of a misnomer. If the generally accepted meaning of the term "random" were applicable, it would not be possible to analyze a system subjected to "random" vibration. Furthermore, if this term were considered in the context of having no specific pattern (i.e., haphazard), it would not be possible to define a vibration environment, for the environment would vary in a totally unpredictable manner. Fortunately, this is not the case. The majority of random processes fall in a special category termed stationary. This means that the parameters by which random vibration is characterized do not change significantly when analyzed statistically over a given period of time - the RMS amplitude is constant with time. For instance, the vibration generated by a particular event, say, a missile launch, will be statistically similar whether the event is measured today or six months from today. -

176 Assessment of Noise Impact: a Case Study
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by UMP Institutional Repository National Conference in Mechanical Engineering Research and Postgraduate Studies (2nd NCMER 2010) 3-4 December 2010, Faculty of Mechanical Engineering, UMP Pekan, Kuantan, Pahang, Malaysia; pp. 176-182 ISBN: 978-967-0120-04-1; Editors: M.M. Rahman, M.Y. Taib, A.R. Ismail, A.R. Yusoff, and M.A.M. Romlay ©Universiti Malaysia Pahang ASSESSMENT OF NOISE IMPACT: A CASE STUDY DUE TO AIRCRAFT ACTIVITIES A.R. Ismail1, M.F.M.Tahir2, M.J.M. Nor2, M.H.M. Haniff2 and R.Zulkifli2 1Faculty of Mechanical Engineering, Universiti Malaysia Pahang 26600 UMP, Pekan, Pahang, Malaysia Phone: +6013-3942463, Fax: +609-4242202 E-mail: [email protected] 2Department of Mechanical and Material Faculty of Engineering and Built Environment Universiti Kebangsaan Malaysia, Bangi, Selangor, Malaysia. Tel.: +603-89216511. Fax: +603-89259659 E-mail: [email protected] ABSTRACT This paper presents the results obtained from an environmental noise measurement at a selected location in Malaysia in order to establish the impact of noise to human at residential area. The measurement site was situated less than three kilometers from the nearest airport and any major activities can be expected to be heard. The noise measurement was carried out for 24 hours monitoring for 30 days by using integrated B&K SLM equipments to obtain the equivalent sound level (Leq), L10 and L90 so that the exposure of noise to community can be assessed. Maximum sound level (Lmax) and sound exposure level have been measured as specified by the Federal Aviation Administration (FAA) for aviation noise assessment. -

Calibration Methods – Nomenclature and Classification
CHAPTER 8 CALIBRATION METHODS – NOMENCLATURE AND CLASSIFICATION Paweł Kościelniak Institute of Analytical Chemistry, Faculty of Chemistry, Jagiellonian University, R. Ingardena 3, 30-060 Kraków, Poland ABSTRACT Reviewing the analytical literature, including academic textbooks, one can notice that in fact there is no precise and clear terminology dealing with the analytical calibration. Especially a great confusion exists in nomenclature related to the calibration methods: not only different names are used with reference to a given method, but they do not express the principles and the nature of different methods properly (e.g. "the set of standard method" or "the internal standard method"). The problem mentioned above is of great importance. A lack of good terminology can be a source of misunderstandings and, consequently, can be even a reason of carrying out an analytical treatment against the rules. Finally, the aspect of rather psychological nature is worth to be stressed, namely just an analyst is (or should be at least) especially sensitive to such terms as "order" and "purity" irrespectively of what analytical area is considered. Chapter 8 1 INTRODUCTION Reading the professional literature, one is bound to arrive at the conclusion that in analytical chemistry there is a lack of clearly defined, current nomenclature relating to the problems of analytical calibration. It is characteristic that, among other things, in spite of the inevitable necessity of carrying out calibration in instrumental analysis and the common usage of the term ‘analytical calibration’ itself, it is not defined even in texts on nomenclature problems in chemistry [1,2], or otherwise the definitions are not connected with analytical practice [3]. -

Pressure Measuring Instruments
testo-312-2-3-4-P01 21.08.2012 08:49 Seite 1 We measure it. Pressure measuring instruments For gas and water installers testo 312-2 HPA testo 312-3 testo 312-4 BAR °C www.testo.com testo-312-2-3-4-P02 23.11.2011 14:37 Seite 2 testo 312-2 / testo 312-3 We measure it. Pressure meters for gas and water fitters Use the testo 312-2 fine pressure measuring instrument to testo 312-2 check flue gas draught, differential pressure in the combustion chamber compared with ambient pressure testo 312-2, fine pressure measuring or gas flow pressure with high instrument up to 40/200 hPa, DVGW approval, incl. alarm display, battery and resolution. Fine pressures with a resolution of 0.01 hPa can calibration protocol be measured in the range from 0 to 40 hPa. Part no. 0632 0313 DVGW approval according to TRGI for pressure settings and pressure tests on a gas boiler. • Switchable precision range with a high resolution • Alarm display when user-defined limit values are • Compensation of measurement fluctuations caused by exceeded temperature • Clear display with time The versatile pressure measuring instrument testo 312-3 testo 312-3 supports load and gas-rightness tests on gas and water pipelines up to 6000 hPa (6 bar) quickly and reliably. testo 312-3 versatile pressure meter up to Everything you need to inspect gas and water pipe 300/600 hPa, DVGW approval, incl. alarm display, battery and calibration protocol installations: with the electronic pressure measuring instrument testo 312-3, pressure- and gas-tightness can be tested. -

Bernoulli-Gaussian Distribution with Memory As a Model for Power Line Communication Noise Victor Fernandes, Weiler A
XXXV SIMPOSIO´ BRASILEIRO DE TELECOMUNICAC¸ OES˜ E PROCESSAMENTO DE SINAIS - SBrT2017, 3-6 DE SETEMBRO DE 2017, SAO˜ PEDRO, SP Bernoulli-Gaussian Distribution with Memory as a Model for Power Line Communication Noise Victor Fernandes, Weiler A. Finamore, Mois´es V. Ribeiro, Ninoslav Marina, and Jovan Karamachoski Abstract— The adoption of Additive Bernoulli-Gaussian Noise very useful to come up with a as simple as possible models (ABGN) as an additive noise model for Power Line Commu- of PLC noise, similar to the additive white Gaussian noise nication (PLC) systems is the subject of this paper. ABGN is a (AWGN) model. model that for a fraction of time is a low power noise and for the remaining time is a high power (impulsive) noise. In this context, In this regard, we introduce the definition of a simple and we investigate the usefulness of the ABGN as a model for the useful mathematical model for the noise perturbing the data additive noise in PLC systems, using samples of noise registered transmission over PLC channel that would be a helpful tool. during a measurement campaign. A general procedure to find the With this goal in mind, an investigation of the usefulness of model parameters, namely, the noise power and the impulsiveness what we call additive Bernoulli-Gaussian noise (ABGN) as a factor is presented. A strategy to assess the noise memory, using LDPC codes, is also examined and we came to the conclusion that model for the noise perturbing the digital communication over ABGN with memory is a consistent model that can be used as for PLC channel is discussed. -
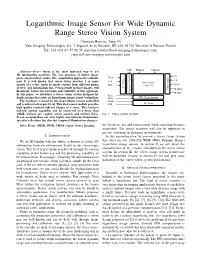
Logarithmic Image Sensor for Wide Dynamic Range Stereo Vision System
Logarithmic Image Sensor For Wide Dynamic Range Stereo Vision System Christian Bouvier, Yang Ni New Imaging Technologies SA, 1 Impasse de la Noisette, BP 426, 91370 Verrieres le Buisson France Tel: +33 (0)1 64 47 88 58 [email protected], [email protected] NEG PIXbias COLbias Abstract—Stereo vision is the most universal way to get 3D information passively. The fast progress of digital image G1 processing hardware makes this computation approach realizable Vsync G2 Vck now. It is well known that stereo vision matches 2 or more Control Amp Pixel Array - Scan Offset images of a scene, taken by image sensors from different points RST - 1280x720 of view. Any information loss, even partially in those images, will V Video Out1 drastically reduce the precision and reliability of this approach. Exposure Out2 In this paper, we introduce a stereo vision system designed for RD1 depth sensing that relies on logarithmic image sensor technology. RD2 FPN Compensation The hardware is based on dual logarithmic sensors controlled Hsync and synchronized at pixel level. This dual sensor module provides Hck H - Scan high quality contrast indexed images of a scene. This contrast indexed sensing capability can be conserved over more than 140dB without any explicit sensor control and without delay. Fig. 1. Sensor general structure. It can accommodate not only highly non-uniform illumination, specular reflections but also fast temporal illumination changes. Index Terms—HDR, WDR, CMOS sensor, Stereo Imaging. the details are lost and consequently depth extraction becomes impossible. The sensor reactivity will also be important to prevent saturation in changing environments. -

Amplifier Frequency Response
EE105 – Fall 2015 Microelectronic Devices and Circuits Prof. Ming C. Wu [email protected] 511 Sutardja Dai Hall (SDH) 2-1 Amplifier Gain vO Voltage Gain: Av = vI iO Current Gain: Ai = iI load power vOiO Power Gain: Ap = = input power vIiI Note: Ap = Av Ai Note: Av and Ai can be positive, negative, or even complex numbers. Nagative gain means the output is 180° out of phase with input. However, power gain should always be a positive number. Gain is usually expressed in Decibel (dB): 2 Av (dB) =10log Av = 20log Av 2 Ai (dB) =10log Ai = 20log Ai Ap (dB) =10log Ap 2-2 1 Amplifier Power Supply and Dissipation • Circuit needs dc power supplies (e.g., battery) to function. • Typical power supplies are designated VCC (more positive voltage supply) and -VEE (more negative supply). • Total dc power dissipation of the amplifier Pdc = VCC ICC +VEE IEE • Power balance equation Pdc + PI = PL + Pdissipated PI : power drawn from signal source PL : power delivered to the load (useful power) Pdissipated : power dissipated in the amplifier circuit (not counting load) P • Amplifier power efficiency η = L Pdc Power efficiency is important for "power amplifiers" such as output amplifiers for speakers or wireless transmitters. 2-3 Amplifier Saturation • Amplifier transfer characteristics is linear only over a limited range of input and output voltages • Beyond linear range, the output voltage (or current) waveforms saturates, resulting in distortions – Lose fidelity in stereo – Cause interference in wireless system 2-4 2 Symbol Convention iC (t) = IC +ic (t) iC (t) : total instantaneous current IC : dc current ic (t) : small signal current Usually ic (t) = Ic sinωt Please note case of the symbol: lowercase-uppercase: total current lowercase-lowercase: small signal ac component uppercase-uppercase: dc component uppercase-lowercase: amplitude of ac component Similarly for voltage expressions. -

EP Signal to Noise in Emp 2
TN0000909 – Former Doc. No. TECN1852625 – New Doc. No. Rev. 02 Page 1 of 5 Understanding the EP Signal-to-Noise Calculation in Empower 2 This document: • Provides a definition of the 2005 European Pharmacopeia (EP) signal-to-noise ratio • Describes the built-in EP S/N calculation in Empower™ 2 • Describes the custom field necessary to determine EP S/N using noise from a blank injection. 2005 European Pharmacopeia (EP) Definition: Signal-to-Noise Ratio The signal-to-noise ratio (S/N) influences the precision of quantification and is calculated by the equation: 2H S/N = λ where: H = Height of the peak (Figure 1) corresponding to the component concerned, in the chromatogram obtained with the prescribed reference solution, measured from the maximum of the peak to the extrapolated baseline of the signal observed over a distance equal to 20 times the width at half-height. λ = Range of the background noise in a chromatogram obtained after injection or application of a blank, observed over a distance equal to 20 times the width at half- height of the peak in the chromatogram obtained with the prescribed reference solution and, if possible, situated equally around the place where this peak would be found. Figure 1 – Peak Height Measurement TN0000909 – Former Doc. No. TECN1852625 – New Doc. No. Rev. 02 Page 2 of 5 In Empower 2 software, the EP Signal-to-Noise (EP S/N) is determined in an automated fashion and does not require a blank injection. The intention of this calculation is to preserve the sense of the EP calculation without requiring a separate blank injection. -
Measurement and Estimation of the Mode Partition Coefficient K
Measurement and Estimation of the Mode Partition Coefficient k Rick Pimpinella and Jose Castro IEEE P802.3bm 40 Gb/s and 100 Gb/s Fiber Optic Task Force November 2012, San Antonio, TX Background & Objective Background: Mode Partition Noise in MMF channel links is caused by pulse-to-pulse power fluctuations among VCSEL modes and differential delay due to dispersion in the fiber (Power independent penalty) “k” is an index used to describe the degree of mode fluctuations and takes on a value between 0 and 1, called the mode partition coefficient [1,2] Currently the IEEE link model assumes k = 0.3 It has been discussed that a new link model requires validation of k The measurement & estimation of k is challenging due to several conditions: Low sensitivity of detectors at 850nm The presence of additional noise components in VCSEL-MMF channels (RIN, MN, Jitter – intensity fluctuations, reflection noise, thermal noise, …) Differences in VCSEL designs Objective: Provide an experimental estimate of the value of k for VCSELs Additional work in progress 2 MPN Theory Originally derived for Fabry-Perot lasers and SMF [3] Assumptions: Total power of all modes carried by each pulse is constant Power fluctuations among modes are anti-correlated Mechanism: When modes (different wavelengths) travel at the same speed their fluctuations remain anti-correlated and the resultant pulse-to-pulse noise is zero. When modes travel in a dispersive medium the modes undergo different delays resulting in pulse distortions and a noise penalty. Example: Two VCSEL modes transmitted in a SMF undergoing chromatic dispersion: START END Optical Waveform @ Detector START t END With mode power fluctuations Decision Region Shorter Wavelength Time (arrival) t slope DL Time (arrival) Longer Wavelength Time (arrival) 3 Example of Intensity Fluctuation among VCSEL modes MPN can be observed using an Optical Spectrum Analyzer (OSA). -

A Measuring Instrument for Multipoint Soil Temperature Underground
A MEASURING INSTRUMENT FOR MULTIPOINT SOIL TEMPERATURE UNDERGROUND Cheng Wang, Chunjiang Zhao * , Xiaojun Qiao, Zhilong Xu National Engineering Research Center for Information Technology in Agriculture, Beijing, P. R. China, 100097 * Corresponding author, Address: Shuguang Huayuan Middle Road 11#, Beijing, 100097, P. R. China, Tel: +86-10-51503411, Fax: +86-10-51503449, Email: [email protected] Abstract: A new measuring instrument for 10 points soil temperatures in 0–50 centimeters depth underground was designed. System was based on Silicon Laboratories’ MCU C8051F310, single chip digital temperature sensor DS18B20, and other peripheral circuits. It was simultaneously able to measure, memory and display, and also convey data to computer via a standard RS232 interface. Keywords: Multi-point Soil Temperature; Portable; DS18B20; C8051F310 1. INTRODUCTION The temperature of soil is a vital environmental factor, which directly influences the activity of microorganisms and the decomposition of organic substances. It can affect roots absorbing water and mineral elements. It also plays an important role in the growth rate and range of roots. Statistically, roots of most plants are within 50 centimeters underground, so it becomes very significant to measure the soil temperature of different depth in this level. The Soil Temperature Measuring Instruments used nowadays mainly fall into three types, the first type is the measure temperature by making use of the relationship between the soil temperature and the temperature-sensitive resistor. Before using this sort of instruments, the system parameters need to Wang, C., Zhao, C., Qiao, X. and Xu, Z., 2008, in IFIP International Federation for Information Processing, Volume 259; Computer and Computing Technologies in Agriculture, Vol. -

Receiver Dynamic Range: Part 2
The Communications Edge™ Tech-note Author: Robert E. Watson Receiver Dynamic Range: Part 2 Part 1 of this article reviews receiver mea- the receiver can process acceptably. In sim- NF is the receiver noise figure in dB surements which, taken as a group, describe plest terms, it is the difference in dB This dynamic range definition has the receiver dynamic range. Part 2 introduces between the inband 1-dB compression point advantage of being relatively easy to measure comprehensive measurements that attempt and the minimum-receivable signal level. without ambiguity but, unfortunately, it to characterize a receiver’s dynamic range as The compression point is obvious enough; assumes that the receiver has only a single a single number. however, the minimum-receivable signal signal at its input and that the signal is must be identified. desired. For deep-space receivers, this may be COMPREHENSIVE MEASURE- a reasonable assumption, but the terrestrial MENTS There are a number of candidates for mini- mum-receivable signal level, including: sphere is not usually so benign. For specifi- The following receiver measurements and “minimum-discernable signal” (MDS), tan- cation of general-purpose receivers, some specifications attempt to define overall gential sensitivity, 10-dB SNR, and receiver interfering signals must be assumed, and this receiver dynamic range as a single number noise floor. Both MDS and tangential sensi- is what the other definitions of receiver which can be used both to predict overall tivity are based on subjective judgments of dynamic range do. receiver performance and as a figure of merit signal strength, which differ significantly to compare competing receivers. -

For the Falcon™ Range of Microphone Products (Ba5105)
Technical Documentation Microphone Handbook For the Falcon™ Range of Microphone Products Brüel&Kjær B K WORLD HEADQUARTERS: DK-2850 Nærum • Denmark • Telephone: +4542800500 •Telex: 37316 bruka dk • Fax: +4542801405 • e-mail: [email protected] • Internet: http://www.bk.dk BA 5105 –12 Microphone Handbook Revision February 1995 Brüel & Kjær Falcon™ Range of Microphone Products BA 5105 –12 Microphone Handbook Trademarks Microsoft is a registered trademark and Windows is a trademark of Microsoft Cor- poration. Copyright © 1994, 1995, Brüel & Kjær A/S All rights reserved. No part of this publication may be reproduced or distributed in any form or by any means without prior consent in writing from Brüel & Kjær A/S, Nærum, Denmark. 0 − 2 Falcon™ Range of Microphone Products Brüel & Kjær Microphone Handbook Contents 1. Introduction....................................................................................................................... 1 – 1 1.1 About the Microphone Handbook............................................................................... 1 – 2 1.2 About the Falcon™ Range of Microphone Products.................................................. 1 – 2 1.3 The Microphones ......................................................................................................... 1 – 2 1.4 The Preamplifiers........................................................................................................ 1 – 8 1 2. Prepolarized Free-field /2" Microphone Type 4188....................... 2 – 1 2.1 Introduction ................................................................................................................