Fairy Lights in Femtoseconds: Aerial and Volumetric Graphics Rendered
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Early-Stage Dynamics of Chloride Ion–Pumping Rhodopsin Revealed by a Femtosecond X-Ray Laser
Early-stage dynamics of chloride ion–pumping rhodopsin revealed by a femtosecond X-ray laser Ji-Hye Yuna,1, Xuanxuan Lib,c,1, Jianing Yued, Jae-Hyun Parka, Zeyu Jina, Chufeng Lie, Hao Hue, Yingchen Shib,c, Suraj Pandeyf, Sergio Carbajog, Sébastien Boutetg, Mark S. Hunterg, Mengning Liangg, Raymond G. Sierrag, Thomas J. Laneg, Liang Zhoud, Uwe Weierstalle, Nadia A. Zatsepine,h, Mio Ohkii, Jeremy R. H. Tamei, Sam-Yong Parki, John C. H. Spencee, Wenkai Zhangd, Marius Schmidtf,2, Weontae Leea,2, and Haiguang Liub,d,2 aDepartment of Biochemistry, College of Life Sciences and Biotechnology, Yonsei University, Seodaemun-gu, 120-749 Seoul, South Korea; bComplex Systems Division, Beijing Computational Science Research Center, Haidian, 100193 Beijing, People’s Republic of China; cDepartment of Engineering Physics, Tsinghua University, 100086 Beijing, People’s Republic of China; dDepartment of Physics, Beijing Normal University, Haidian, 100875 Beijing, People’s Republic of China; eDepartment of Physics, Arizona State University, Tempe, AZ 85287; fPhysics Department, University of Wisconsin, Milwaukee, Milwaukee, WI 53201; gLinac Coherent Light Source, Stanford Linear Accelerator Center National Accelerator Laboratory, Menlo Park, CA 94025; hDepartment of Chemistry and Physics, Australian Research Council Centre of Excellence in Advanced Molecular Imaging, La Trobe Institute for Molecular Science, La Trobe University, Melbourne, VIC 3086, Australia; and iDrug Design Laboratory, Graduate School of Medical Life Science, Yokohama City University, 230-0045 Yokohama, Japan Edited by Nicholas K. Sauter, Lawrence Berkeley National Laboratory, Berkeley, CA, and accepted by Editorial Board Member Axel T. Brunger February 21, 2021 (received for review September 30, 2020) Chloride ion–pumping rhodopsin (ClR) in some marine bacteria uti- an acceptor aspartate (13–15). -
Comparing Femtosecond Lasers an Analysis of Commercially Available Platforms for Refractive Surgery
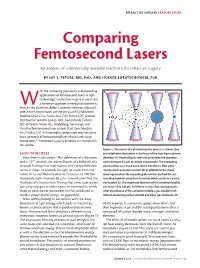
REFRACTIVE SURGERY FEATURE STORY Comparing Femtosecond Lasers An analysis of commercially available platforms for refractive surgery. BY JAY S. PEPOSE, MD, PHD, AND HOLGER LUBATSCHOWSKI, PHD ith the increasing popularity and expanding A BCD applications of femtosecond lasers in oph- thalmology,1,2 refractive surgery in particular, W a common question among practitioners is, how do the platforms differ? Currently commercially avail- able in the United States are the IntraLase FS (Advanced Medical Optics, Inc., Santa Ana, CA), Femto LDV (Ziemer Ophthalmic Systems Group, Port, Switzerland), Femtec (20/10 Perfect Vision AG, Heidelberg, Germany), and VisuMax femtosecond laser system (Carl Zeiss Meditec, Inc., Dublin, CA). A meaningful comparison requires some basic concepts of femtosecond laser physics and tissue interactions,3-5 important aspects of which are reviewed in this article. Figure 1. The course of a photodisruptive process is shown.Due BASIC PRINCIPLES to multiphoton absorption in the focus of the laser beam,plasma How short is ultrashort? The definition of a femtosec- develops (A).Depending on the laser parameter,the diameter ond is 10-15 seconds (ie, one millionth of a billionth of a varies between 0.5 µm to several micrometers.The expanding second). Putting that information into comprehensible plasma drives as a shock wave,which transforms after a few terms, it takes 1.2 seconds for light to travel from the microns to an acoustic transient (B).In addition to the shock moon to an earthbound observer’s retinas. In 100 fem- wave’s generation,the expanding plasma has pushed the sur- toseconds, light traverses 30 µm—around one-third the rounding medium away from its center,which results in a cavita- thickness of a human hair. -

A Novel Walk-Through 3D Display
A Novel Walk-through 3D Display Stephen DiVerdia, Ismo Rakkolainena & b, Tobias Höllerera, Alex Olwala & c a University of California at Santa Barbara, Santa Barbara, CA 93106, USA b FogScreen Inc., Tekniikantie 12, 02150 Espoo, Finland c Kungliga Tekniska Högskolan, 100 44 Stockholm, Sweden ABSTRACT We present a novel walk-through 3D display based on the patented FogScreen, an “immaterial” indoor 2D projection screen, which enables high-quality projected images in free space. We extend the basic 2D FogScreen setup in three ma- jor ways. First, we use head tracking to provide correct perspective rendering for a single user. Second, we add support for multiple types of stereoscopic imagery. Third, we present the front and back views of the graphics content on the two sides of the FogScreen, so that the viewer can cross the screen to see the content from the back. The result is a wall- sized, immaterial display that creates an engaging 3D visual. Keywords: Fog screen, display technology, walk-through, two-sided, 3D, stereoscopic, volumetric, tracking 1. INTRODUCTION Stereoscopic images have captivated a wide scientific, media and public interest for well over 100 years. The principle of stereoscopic images was invented by Wheatstone in 1838 [1]. The general public has been excited about 3D imagery since the 19th century – 3D movies and View-Master images in the 1950's, holograms in the 1960's, and 3D computer graphics and virtual reality today. Science fiction movies and books have also featured many 3D displays, including the popular Star Wars and Star Trek series. In addition to entertainment opportunities, 3D displays also have numerous ap- plications in scientific visualization, medical imaging, and telepresence. -

Terahertz-Time Domain Spectrometer with 90 Db Peak Dynamic Range
J Infrared Milli Terahz Waves DOI 10.1007/s10762-014-0085-9 Terahertz-time domain spectrometer with 90 dB peak dynamic range N. Vieweg & F. Rettich & A. Deninger & H. Roehle & R. Dietz & T. Göbel & M. Schell Received: 24 January 2014 /Accepted: 12 June 2014 # The Author(s) 2014. This article is published with open access at Springerlink.com Abstract Many time-domain terahertz applications require systems with high bandwidth, high signal-to-noise ratio and fast measurement speed. In this paper we present a terahertz time-domain spectrometer based on 1550 nm fiber laser technology and InGaAs photocon- ductive switches. The delay stage offers both a high scanning speed of up to 60 traces / s and a flexible adjustment of the measurement range from 15 ps – 200 ps. Owing to a precise reconstruction of the time axis, the system achieves a high dynamic range: a single pulse trace of 50 ps is acquired in only 44 ms, and transformed into a spectrum with a peak dynamic range of 60 dB. With 1000 averages, the dynamic range increases to 90 dB and the measurement time still remains well below one minute. We demonstrate the suitability of the system for spectroscopic measurements and terahertz imaging. Keywords terahertz time domain spectroscopy. femtosecond fiber laser. InGaAs photoconductive switches . terahertz imaging 1 Introduction Terahertz waves feature unique properties: like microwaves, terahertz radiation passes through a plethora of non-conducting materials, including paper, cardboard, plastics, wood, ceramics and glass-fiber composites [1]. In contrast to microwaves, terahertz waves have a smaller wavelength and thus offer sub-millimeter spatial resolution. -

14. Measuring Ultrashort Laser Pulses I: Autocorrelation the Dilemma the Goal: Measuring the Intensity and Phase Vs
14. Measuring Ultrashort Laser Pulses I: Autocorrelation The dilemma The goal: measuring the intensity and phase vs. time (or frequency) Why? The Spectrometer and Michelson Interferometer 1D Phase Retrieval Autocorrelation 1D Phase Retrieval E(t) Single-shot autocorrelation E(t–) The Autocorrelation and Spectrum Ambiguities Third-order Autocorrelation Interferometric Autocorrelation 1 The Dilemma In order to measure an event in time, you need a shorter one. To study this event, you need a strobe light pulse that’s shorter. Photograph taken by Harold Edgerton, MIT But then, to measure the strobe light pulse, you need a detector whose response time is even shorter. And so on… So, now, how do you measure the shortest event? 2 Ultrashort laser pulses are the shortest technological events ever created by humans. It’s routine to generate pulses shorter than 10-13 seconds in duration, and researchers have generated pulses only a few fs (10-15 s) long. Such a pulse is to one second as 5 cents is to the US national debt. Such pulses have many applications in physics, chemistry, biology, and engineering. You can measure any event—as long as you’ve got a pulse that’s shorter. So how do you measure the pulse itself? You must use the pulse to measure itself. But that isn’t good enough. It’s only as short as the pulse. It’s not shorter. Techniques based on using the pulse to measure itself are subtle. 3 Why measure an ultrashort laser pulse? To determine the temporal resolution of an experiment using it. To determine whether it can be made even shorter. -

The Effect of Long Timescale Gas Dynamics on Femtosecond Filamentation
The effect of long timescale gas dynamics on femtosecond filamentation Y.-H. Cheng, J. K. Wahlstrand, N. Jhajj, and H. M. Milchberg* Institute for Research in Electronics and Applied Physics, University of Maryland, College Park, Maryland 20742, USA *[email protected] Abstract: Femtosecond laser pulses filamenting in various gases are shown to generate long- lived quasi-stationary cylindrical depressions or ‘holes’ in the gas density. For our experimental conditions, these holes range up to several hundred microns in diameter with gas density depressions up to ~20%. The holes decay by thermal diffusion on millisecond timescales. We show that high repetition rate filamentation and supercontinuum generation can be strongly affected by these holes, which should also affect all other experiments employing intense high repetition rate laser pulses interacting with gases. ©2013 Optical Society of America OCIS codes: (190.5530) Pulse propagation and temporal solitons; (350.6830) Thermal lensing; (320.6629) Supercontinuum generation; (260.5950) Self-focusing. References and Links 1. A. Couairon and A. Mysyrowicz, “Femtosecond filamentation in transparent media,” Phys. Rep. 441(2-4), 47– 189 (2007). 2. P. B. Corkum, C. Rolland, and T. Srinivasan-Rao, “Supercontinuum generation in gases,” Phys. Rev. Lett. 57(18), 2268–2271 (1986). S. A. Trushin, K. Kosma, W. Fuss, and W. E. Schmid, “Sub-10-fs supercontinuum radiation generated by filamentation of few-cycle 800 nm pulses in argon,” Opt. Lett. 32(16), 2432–2434 (2007). 3. N. Zhavoronkov, “Efficient spectral conversion and temporal compression of femtosecond pulses in SF6.,” Opt. Lett. 36(4), 529–531 (2011). 4. C. P. Hauri, R. B. -
Femtosecond Pulse Generation
Femto-UP 2020-21 School Femtosecond Pulse Generation Adeline Bonvalet Laboratoire d’Optique et Biosciences CNRS, INSERM, Ecole Polytechnique, Institut Polytechnique de Paris, 91128, Palaiseau, France 1 Definitions Electric field of a 10-fs 800-nm pulse nano 10-9 sec pico 10-12 femto 10-15 2,7 fs atto 10-18 10 fs time 2 Many properties Electric field of a 10-fs 800-nm pulse High peaki power (Energy /Duration) Ultrashorti Duration Spectral Properties i (Frequency Comb) time 3 Time-resolved spectroscopy Electric field of a 10-fs 800-nm pulse Ultrashorti Duration Time-resolved spectroscopy Direct observation of ultrafast motions time Ahmed Zewail, Nobel Prize in chemistry 1999, femtochemistry 4 Imaging Electric field of a 10-fs 800-nm pulse High peaki power (Energy /Duration) Nonlinear microscopy time 5 Material processing Electric field of a 10-fs 800-nm pulse High peaki power (Energy /Duration) Laser matter interaction Drilling, cutting, etching,… time Areas of applications : aeronautics, electronics, medical,6 optics… Light matter interaction Electric field of a 10-fs 800-nm pulse High peaki power (Energy /Duration) Ability to reach extreme conditions (amplified system) Applications : Sources of intense particles beams, X-rays, high energy density science, laboratory astroprophysics … time 7 Metrology Electric field of a 10-fs 800-nm pulse Spectral Properties i (Frequency Comb) Nobel Prize 2005 "for their contributions to the development of laser-based time precision spectroscopy, including the optical frequency comb technique." 8 Outline -
State-Of-The-Art in Holography and Auto-Stereoscopic Displays
State-of-the-art in holography and auto-stereoscopic displays Daniel Jönsson <Ersätt med egen bild> 2019-05-13 Contents Introduction .................................................................................................................................................. 3 Auto-stereoscopic displays ........................................................................................................................... 5 Two-View Autostereoscopic Displays ....................................................................................................... 5 Multi-view Autostereoscopic Displays ...................................................................................................... 7 Light Field Displays .................................................................................................................................. 10 Market ......................................................................................................................................................... 14 Display panels ......................................................................................................................................... 14 AR ............................................................................................................................................................ 14 Application Fields ........................................................................................................................................ 15 Companies ................................................................................................................................................. -

Demystifying the Future of the Screen
Demystifying the Future of the Screen by Natasha Dinyar Mody A thesis exhibition presented to OCAD University in partial fulfillment of the requirements for the degree of Master of Design in DIGITAL FUTURES 49 McCaul St, April 12-15, 2018 Toronto, Ontario, Canada, April, 2018 © Natasha Dinyar Mody, 2018 AUTHOR’S DECLARATION I hereby declare that I am the sole author of this thesis. This is a true copy of the thesis, including any required final revisions, as accepted by my examiners. I authorize OCAD University to lend this thesis to other institutions or individuals for the purpose of scholarly research. I understand that my thesis may be made electronically available to the public. I further authorize OCAD University to reproduce this thesis by photocopying or by other means, in total or in part, at the request of other institutions or individuals for the purpose of scholarly research. Signature: ii ABSTRACT Natasha Dinyar Mody ‘Demystifying the Future of the Screen’ Master of Design, Digital Futures, 2018 OCAD University Demystifying the Future of the Screen explores the creation of a 3D representation of volumetric display (a graphical display device that produces 3D objects in mid-air), a technology that doesn’t yet exist in the consumer realm, using current technologies. It investigates the conceptual possibilities and technical challenges of prototyping a future, speculative, technology with current available materials. Cultural precedents, technical antecedents, economic challenges, and industry adaptation, all contribute to this thesis proposal. It pedals back to the past to examine the probable widespread integration of this future technology. By employing a detailed horizon scan, analyzing science fiction theories, and extensive user testing, I fabricated a prototype that simulates an immersive volumetric display experience, using a holographic display fan. -

Generation of Electromagnetic Pulses from Plasma Channels Induced By
Generationofelectromagneticpulsesfromplasmachannels inducedbyfemtosecondlightstrings Chung-ChiehCheng,E.M.Wright,andJ.V.Moloney ArizonaCenterforMathematicalSciences,andOpticalSciencesCenter,UniversityofArizona, Tucson,AZ85721 December04,2000 We present a model that elucidates the physics underlying the generation of an electromagneticpulsefromaplasmachannelresultingfromtheionizationofairbya femtosecond laser pulse. By a new mechanism analogous to nonlinear optical rectification,thelaserpulseinducesadipolemomentintheplasmawhichsubsequently oscillates at the plasma frequency and radiates an electromagnetic pulse with a peak frequency within the far-infrared to microwave region, depending on the electron density,withabandwidtharoundhundredsofgigahertz. PACS:33.80.WzOthermultiphotonprocesses 42.65.ReUltrafastprocesses;opticalpulsegenerationandpulsecompression 52.40.DbElectromagnetic(nonlaser)radiationinteractionswithplasma Recentinvestigationsofthepropagationofintensefemtosecondinfrared(IR)laser pulsesinairshowthatthedynamicalinteractionbetweennonlinearself-focusing, plasmadefocusing,andgroup-velocitydispersioncancauseaninitialbeamtobreakup spatiallyintoseveralfilaments,orlightstrings,withdiametersaroundahundred micronsthatcanmaintainthemselvesoverlongdistances[1,2,3,4,5].Ithasbeen observedexperimentallythatfemtosecondlightstringsinturnproduceplasma channelsbymulti-photonionization(MPI)alongtheirdirectionofpropagationwith lengthsrangingfromtensofcentimeterstoseveralmeters[6,7,8].Observationsofthe electromagneticpulses(EMPs)fromlightstringinducedplasmassuggestthatthese -

Thz Field Engineering in Two-Color Femtosecond Filaments Using
THz field engineering in two-color femtosecond filaments using chirped and delayed laser pulses A Nguyen, P González de Alaiza Martínez, I Thiele, Stefan Skupin, L Bergé To cite this version: A Nguyen, P González de Alaiza Martínez, I Thiele, Stefan Skupin, L Bergé. THz field engineering in two-color femtosecond filaments using chirped and delayed laser pulses. New Journal of Physics, Institute of Physics: Open Access Journals, 2018, 20 (3), pp.033026. 10.1088/1367-2630/aaa470. hal-01754802 HAL Id: hal-01754802 https://hal.archives-ouvertes.fr/hal-01754802 Submitted on 30 Mar 2018 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. PAPER • OPEN ACCESS Related content - Validity of the unidirectional propagation THz field engineering in two-color femtosecond model: Application to laser-driven terahertz emission J Déchard, A Nguyen, P González de filaments using chirped and delayed laser pulses Alaiza Martínez et al. - Spectral self-action of THz emission from To cite this article: A Nguyen et al 2018 New J. Phys. 20 033026 ionizing two-color laser pulses in gases Eduardo Cabrera-Granado, Yxing Chen, Ihar Babushkin et al. - Intense terahertz radiation and their applications View the article online for updates and enhancements. -

Femtosecond Optics by Tomas Jankauskas
Femtosecond optics by Tomas Jankauskas Since the introduction of the first sub-picosecond lasers in the 1990s, the market for femtosecond optics Chromatic dispersion has grownrapidly. However, it still cannot compete with longer pulse or CW laser markets. In femtosecond Since the optical spectrum of an ultrashort pulse is very applications problems of conventional optics and broad, group velocity plays a key role in understanding coatings are that they either distort the temporal how ultrashort optics work. Group velocity of a wave characteristics of the pulse, or are damaged by high is the velocity with which the overall shape of waves’ peak power of the pulse. To better understand why this amplitudes propagates through space. It would be happens, let’s look at the basics of the ultrashort world. correct to say that group velocity is the velocity with Though the definition sometimes varies, anultrashort which whole broad electromagnetic ultrashort pulse pulse is an electromagnetic pulse with a time duration propagates. For free space where the refractive index of one picosecond (10-12 second) or less. Since ultrashort is equal to one, group velocity is constant for all phenomena are too fast to be directly measured with components of the pulse. electronic devices such events are sometimes referred Optical materials possess a specific quality, the phase to as ultrafast (the meaning, however, is the same). velocity of light inside the material depends on the Pulse length is inversely proportional to the optical frequency (or wavelength), and equivalently the group spectrum of the laser beam therefore ultrashort pulses velocity depends on the frequency.