The Stored Program Computer and Some Early Computational Abstractions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

May 21St at the Time, the EDSAC Used IBM 726 Three Small Cathode Ray Tube Börje Langefors Screens to Display the State of Its Announced Memory
it played tic-tac-toe (known as Noughts and Crosses in the UK). May 21st At the time, the EDSAC used IBM 726 three small cathode ray tube Börje Langefors screens to display the state of its Announced memory. Each one could draw a May 21, 1952 Born: May 21, 1915; grid of 35 x 16 dots. Douglas re- purposed one of them for his Ystad, Sweden The IBM 726 was the company’s game, and obtained input (i.e. Died: Dec. 13, 2009 first magnetic tape unit, where to place a nought or intended for use with the Langefors developed the cross) via EDSAC’s rotary recently announced IBM 701 ‘infological equation’ in 1980, controller. [April 7], the company’s first which describes the difference electronic computer. between information and data in terms of additional semantic The 726 utilized half-inch tapes background and a with seven tracks. Six were for communication time interval. the data and the seventh was employed as a parity track. Langefors joined SAAB, the Some tapes were 1,200 feet long, Swedish aerospace and defense could store 2.3 MB of data, and company, in 1949 where he IBM claimed that just one could utilized analog devices for replace 12,500 punch cards. calculating wing stresses. The need for more powerful tools The drive could write 100 became evident, and the only characters per inch on a tape Swedish computer of the time, EDSAC CRT Tubes. Computer and read 75 inches per second. the BESK [April 1], was Lab, Univ. of Cambridge. CC BY To withstand the system’s fast insufficient for the task. -

Early Stored Program Computers
Stored Program Computers Thomas J. Bergin Computing History Museum American University 7/9/2012 1 Early Thoughts about Stored Programming • January 1944 Moore School team thinks of better ways to do things; leverages delay line memories from War research • September 1944 John von Neumann visits project – Goldstine’s meeting at Aberdeen Train Station • October 1944 Army extends the ENIAC contract research on EDVAC stored-program concept • Spring 1945 ENIAC working well • June 1945 First Draft of a Report on the EDVAC 7/9/2012 2 First Draft Report (June 1945) • John von Neumann prepares (?) a report on the EDVAC which identifies how the machine could be programmed (unfinished very rough draft) – academic: publish for the good of science – engineers: patents, patents, patents • von Neumann never repudiates the myth that he wrote it; most members of the ENIAC team contribute ideas; Goldstine note about “bashing” summer7/9/2012 letters together 3 • 1.0 Definitions – The considerations which follow deal with the structure of a very high speed automatic digital computing system, and in particular with its logical control…. – The instructions which govern this operation must be given to the device in absolutely exhaustive detail. They include all numerical information which is required to solve the problem…. – Once these instructions are given to the device, it must be be able to carry them out completely and without any need for further intelligent human intervention…. • 2.0 Main Subdivision of the System – First: since the device is a computor, it will have to perform the elementary operations of arithmetics…. – Second: the logical control of the device is the proper sequencing of its operations (by…a control organ. -

An Early Program Proof by Alan Turing F
An Early Program Proof by Alan Turing F. L. MORRIS AND C. B. JONES The paper reproduces, with typographical corrections and comments, a 7 949 paper by Alan Turing that foreshadows much subsequent work in program proving. Categories and Subject Descriptors: 0.2.4 [Software Engineeringj- correctness proofs; F.3.1 [Logics and Meanings of Programs]-assertions; K.2 [History of Computing]-software General Terms: Verification Additional Key Words and Phrases: A. M. Turing Introduction The standard references for work on program proofs b) have been omitted in the commentary, and ten attribute the early statement of direction to John other identifiers are written incorrectly. It would ap- McCarthy (e.g., McCarthy 1963); the first workable pear to be worth correcting these errors and com- methods to Peter Naur (1966) and Robert Floyd menting on the proof from the viewpoint of subse- (1967); and the provision of more formal systems to quent work on program proofs. C. A. R. Hoare (1969) and Edsger Dijkstra (1976). The Turing delivered this paper in June 1949, at the early papers of some of the computing pioneers, how- inaugural conference of the EDSAC, the computer at ever, show an awareness of the need for proofs of Cambridge University built under the direction of program correctness and even present workable meth- Maurice V. Wilkes. Turing had been writing programs ods (e.g., Goldstine and von Neumann 1947; Turing for an electronic computer since the end of 1945-at 1949). first for the proposed ACE, the computer project at the The 1949 paper by Alan M. -
Computer Development at the National Bureau of Standards
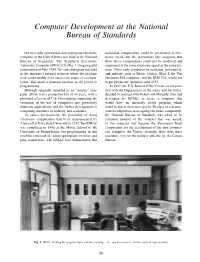
Computer Development at the National Bureau of Standards The first fully operational stored-program electronic individual computations could be performed at elec- computer in the United States was built at the National tronic speed, but the instructions (the program) that Bureau of Standards. The Standards Electronic drove these computations could not be modified and Automatic Computer (SEAC) [1] (Fig. 1.) began useful sequenced at the same electronic speed as the computa- computation in May 1950. The stored program was held tions. Other early computers in academia, government, in the machine’s internal memory where the machine and industry, such as Edvac, Ordvac, Illiac I, the Von itself could modify it for successive stages of a compu- Neumann IAS computer, and the IBM 701, would not tation. This made a dramatic increase in the power of begin productive operation until 1952. programming. In 1947, the U.S. Bureau of the Census, in coopera- Although originally intended as an “interim” com- tion with the Departments of the Army and Air Force, puter, SEAC had a productive life of 14 years, with a decided to contract with Eckert and Mauchly, who had profound effect on all U.S. Government computing, the developed the ENIAC, to create a computer that extension of the use of computers into previously would have an internally stored program which unknown applications, and the further development of could be run at electronic speeds. Because of a demon- computing machines in industry and academia. strated competence in designing electronic components, In earlier developments, the possibility of doing the National Bureau of Standards was asked to be electronic computation had been demonstrated by technical monitor of the contract that was issued, Atanasoff at Iowa State University in 1937. -
The History of Computers: Part II
The History Of Computers: Part II You will learn about the computers of the 20th century and the people behind those machines. Some of the clipart images come from the sites: •http://www.clipartheaven.com/ •http://www.horton-szar.net/ •http://www.shootpetoet.be •www.dpw.wau.nl/pv/temp/ clipart/screenbeans.htm James Tam Categories Of 20th Century Computers •The mechanical monsters of the twenty first century - The machines of Konrad Zuse - The Bell telephone models - Howard Aiken and the Harvard computers •The computers of the electronic revolution -The ABC -The ENIAC - The Colossus machines of Bletchley Park •The first modern (stored program/memory) computers - The Manchester machine -The EDSAC - The EDVAC James Tam Computer History: Part II 1 The Mechanical Monsters •Performed calculations using moving mechanical parts rather than using electronics Images from the History of Computing Technology by Michael R. Williams James Tam The Mechanical Monsters •Many were used to solve equations that were either impossible or very time consuming to solve analytically. •Often conducting experiments were also impractical. James Tam Computer History: Part II 2 The Mechanical Monsters •Konrad Zuse -Z1 –Z4 •George Stibitz - Bell relay based computers Model I - VI •Howard Aiken - Harvard Mark I - IV James Tam The First Set Of Mechanical Monsters Were Created By Konrad Zuse •Developed a series of mechanical calculating machines (Z1, Z2, Z3, Z4). •Motivated by the need to perform complex calculations because current approaches were unsatisfactory. James Tam Computer History: Part II 3 The Z1 •It was entirely mechanical From the History of Computing Technology by Michael R. -

Copyrighted Material
1 The Function of Computation As in music theory, we cannot discuss the microprocessor without positioning it in the context of the history of the computer, since this component is the integrated version of the central unit. Its internal mechanisms are the same as those of supercomputers, mainframe computers and minicomputers. Thanks to advances in microelectronics, additional functionality has been integrated with each generation in order to speed up internal operations. A computer1 is a hardware and software system responsible for the automatic processing of information, managed by a stored program. To accomplish this task, the computer’s essential function is the transformation of data using computation, but two other functions are also essential. Namely, these are storing and transferring information (i.e. communication). In some industrial fields, control is a fourth function. This chapter focuses on the requirements that led to the invention of tools and calculating machines to arrive at the modern version of the computer that we know today. The technological aspect is then addressed. Some chronological references are given. Then several classification criteria are proposed. The analog computer, which is then described, was an alternative to the digital version. Finally, the relationship between hardware and software and the evolution of integration and its limits are addressed. NOTE.– This chapter does not attempt to replace a historical study. It gives only a few key dates and technical benchmarks to understand the technological evolution of the field. COPYRIGHTED MATERIAL 1 The French word ordinateur (computer) was suggested by Jacques Perret, professor at the Faculté des Lettres de Paris, in his letter dated April 16, 1955, in response to a question from IBM to name these machines; the English name was the Electronic Data Processing Machine. -

Simon E. Gluck Collection of Photographs of EDVAC and MSAC Computers 1990.232
Simon E. Gluck collection of photographs of EDVAC and MSAC computers 1990.232 This finding aid was produced using ArchivesSpace on September 19, 2021. Description is written in: English. Describing Archives: A Content Standard Audiovisual Collections PO Box 3630 Wilmington, Delaware 19807 [email protected] URL: http://www.hagley.org/library Simon E. Gluck collection of photographs of EDVAC and MSAC computers 1990.232 Table of Contents Summary Information .................................................................................................................................... 3 Biographical Note .......................................................................................................................................... 3 Scope and Content ......................................................................................................................................... 4 Administrative Information ............................................................................................................................ 4 Related Materials ........................................................................................................................................... 5 Controlled Access Headings .......................................................................................................................... 5 Additonal Extent Statement ........................................................................................................................... 5 - Page 2 - Simon E. Gluck collection -
Open PDF in New Window
BEST AVAILABLE COPY i The pur'pose of this DIGITAL COMPUTER Itop*"°a""-'"""neesietter' YNEWSLETTER . W OFFICf OF NIVAM RUSEARCMI • MATNEMWTICAL SCIENCES DIVISION Vol. 9, No. 2 Editors: Gordon D. Goldstein April 1957 Albrecht J. Neumann TABLE OF CONTENTS It o Page No. W- COMPUTERS. U. S. A. "1.Air Force Armament Center, ARDC, Eglin AFB, Florida 1 2. Air Force Cambridge Research Center, Bedford, Mass. 1 3. Autonetics, RECOMP, Downey, Calif. 2 4. Corps of Engineers, U. S. Army 2 5. IBM 709. New York, New York 3 6. Lincoln Laboratory TX-2, M.I.T., Lexington, Mass. 4 7. Litton Industries 20 and 40 DDA, Beverly Hills, Calif. 5 8. Naval Air Test Centcr, Naval Air Station, Patuxent River, Maryland 5 9. National Cash Register Co. NC 304, Dayton, Ohio 6 10. Naval Air Missile Test Center, RAYDAC, Point Mugu, Calif. 7 11. New York Naval Shipyard, Brooklyn, New York 7 12. Philco, TRANSAC. Philadelphia, Penna. 7 13. Western Reserve Univ., Cleveland, Ohio 8 COMPUTING CENTERS I. Univ. of California, Radiation Lab., Livermore, Calif. 9 2. Univ. of California, SWAC, Los Angeles, Calif. 10 3. Electronic Associates, Inc., Princeton Computation Center, Princeton, New Jersey 10 4. Franklin Institute Laboratories, Computing Center, Philadelphia, Penna. 11 5. George Washington Univ., Logistics Research Project, Washington, D. C. 11 6. M.I.T., WHIRLWIND I, Cambridge, Mass. 12 7. National Bureau of Standards, Applied Mathematics Div., Washington, D.C. 12 8. Naval Proving Ground, Naval Ordnance Computation Center, Dahlgren, Virgin-.a 12 9. Ramo Wooldridge Corp., Digital Computing Center, Los Angeles, Calif. -

Alan Turing's Automatic Computing Engine
5 Turing and the computer B. Jack Copeland and Diane Proudfoot The Turing machine In his first major publication, ‘On computable numbers, with an application to the Entscheidungsproblem’ (1936), Turing introduced his abstract Turing machines.1 (Turing referred to these simply as ‘computing machines’— the American logician Alonzo Church dubbed them ‘Turing machines’.2) ‘On Computable Numbers’ pioneered the idea essential to the modern computer—the concept of controlling a computing machine’s operations by means of a program of coded instructions stored in the machine’s memory. This work had a profound influence on the development in the 1940s of the electronic stored-program digital computer—an influence often neglected or denied by historians of the computer. A Turing machine is an abstract conceptual model. It consists of a scanner and a limitless memory-tape. The tape is divided into squares, each of which may be blank or may bear a single symbol (‘0’or‘1’, for example, or some other symbol taken from a finite alphabet). The scanner moves back and forth through the memory, examining one square at a time (the ‘scanned square’). It reads the symbols on the tape and writes further symbols. The tape is both the memory and the vehicle for input and output. The tape may also contain a program of instructions. (Although the tape itself is limitless—Turing’s aim was to show that there are tasks that Turing machines cannot perform, even given unlimited working memory and unlimited time—any input inscribed on the tape must consist of a finite number of symbols.) A Turing machine has a small repertoire of basic operations: move left one square, move right one square, print, and change state. -
P the Pioneers and Their Computers
The Videotape Sources: The Pioneers and their Computers • Lectures at The Compp,uter Museum, Marlboro, MA, September 1979-1983 • Goal: Capture data at the source • The first 4: Atanasoff (ABC), Zuse, Hopper (IBM/Harvard), Grosch (IBM), Stibitz (BTL) • Flowers (Colossus) • ENIAC: Eckert, Mauchley, Burks • Wilkes (EDSAC … LEO), Edwards (Manchester), Wilkinson (NPL ACE), Huskey (SWAC), Rajchman (IAS), Forrester (MIT) What did it feel like then? • What were th e comput ers? • Why did their inventors build them? • What materials (technology) did they build from? • What were their speed and memory size specs? • How did they work? • How were they used or programmed? • What were they used for? • What did each contribute to future computing? • What were the by-products? and alumni/ae? The “classic” five boxes of a stored ppgrogram dig ital comp uter Memory M Central Input Output Control I O CC Central Arithmetic CA How was programming done before programming languages and O/Ss? • ENIAC was programmed by routing control pulse cables f ormi ng th e “ program count er” • Clippinger and von Neumann made “function codes” for the tables of ENIAC • Kilburn at Manchester ran the first 17 word program • Wilkes, Wheeler, and Gill wrote the first book on programmiidbBbbIiSiing, reprinted by Babbage Institute Series • Parallel versus Serial • Pre-programming languages and operating systems • Big idea: compatibility for program investment – EDSAC was transferred to Leo – The IAS Computers built at Universities Time Line of First Computers Year 1935 1940 1945 1950 1955 ••••• BTL ---------o o o o Zuse ----------------o Atanasoff ------------------o IBM ASCC,SSEC ------------o-----------o >CPC ENIAC ?--------------o EDVAC s------------------o UNIVAC I IAS --?s------------o Colossus -------?---?----o Manchester ?--------o ?>Ferranti EDSAC ?-----------o ?>Leo ACE ?--------------o ?>DEUCE Whirl wi nd SEAC & SWAC ENIAC Project Time Line & Descendants IBM 701, Philco S2000, ERA.. -

John William Mauchly
John William Mauchly Born August 30, 1907, Cincinnati, Ohio; died January 8, 1980, Abington, Pa.; the New York Times obituary (Smolowe 1980) described Mauchly as a “co-inventor of the first electronic computer” but his accomplishments went far beyond that simple description. Education: physics, Johns Hopkins University, 1929; PhD, physics, Johns Hopkins University, 1932. Professional Experience: research assistant, Johns Hopkins University, 1932-1933; professor of physics, Ursinus College, 1933-1941; Moore School of Electrical Engineering, 1941-1946; member, Electronic Control Company, 1946-1948; president, Eckert-Mauchly Computer Company, 1948-1950; Remington-Rand, 1950-1955; director, Univac Applications Research, Sperry-Rand 1955-1959; Mauchly Associates, 1959-1980; Dynatrend Consulting Company, 1967-1980. Honors and Awards: president, ACM, 1948-1949; Howard N. Potts Medal, Franklin Institute, 1949; John Scott Award, 1961; Modern Pioneer Award, NAM, 1965; AMPS Harry Goode Memorial Award for Excellence, 1968; IEEE Emanual R. Piore Award, 1978; IEEE Computer Society Pioneer Award, 1980; member, Information Processing Hall of Fame, Infornart, Dallas, Texas, 1985. Mauchly was born in Cincinnati, Ohio, on August 30, 1907. He attended Johns Hopkins University initially as an engineering student but later transferred into physics. He received his PhD degree in physics in 1932 and the following year became a professor of physics at Ursinus College in Collegeville, Pennsylvania. At Ursinus he was well known for his excellent and dynamic teaching, and for his research in meteorology. Because his meteorological work required extensive calculations, he began to experiment with alternatives to mechanical tabulating equipment in an effort to reduce the time required to solve meteorological equations. -
Computer Architecture ٤٠/٠٦/٢٦
Computer Architecture ٤٠/٠٦/٢٦ Computer Architecture Faculty Of Computers And Information Technology Second Term 2018 - 2019 Dr.Khaled Kh. Sharaf Computer Architecture Topic 1. Introduction 2. Performance Metrics I 3. Memory Hierarchy 4. MIPS Instruction Set Architecture (ISA) 5. Introduction to Logic Circuit Design 6. Instruction Level Parallelism 7. Multicore Architecture 8. GPU Architecture Textbook Patterson & Hennessy (2011 or 2013), "Computer Organization and Design: The Hardware/Software Interface“, revised 4th or 5th edition. ISBN: 978-0-12-374750-1 ١ Computer Architecture ٤٠/٠٦/٢٦ Computer Architecture 1.Introduction • Machine structures: layers of abstraction • Eight great ideas Computer Architecture Konrad Zuse’s Z3 electro-mechanical computer (1941, Germany). Turing complete, though conditional jumps were missing. ٢ Computer Architecture ٤٠/٠٦/٢٦ Computer Architecture Colossus (UK, 1941) was the world’s first totally electronic programmable computing device. But not Turing complete. Computer Architecture Harvard Mark I – IBM ASCC (1944, US). Electro- mechanical computer (no conditional jumps and not Turing complete). It could store 72 numbers, each 23 decimal digits long. It could do three additions or subtractions in a second. A multiplication took six seconds, a division took 15. 3 seconds, and a logarithm or a trigonometric function took over one minute. A loop was accomplished by joining the end of the paper tape containing the program back to the beginning of the tape (literally creating a loop). ٣ Computer Architecture ٤٠/٠٦/٢٦ Computer Architecture Electronic Numerical Integrator And Computer (ENIAC). The first general-purpose, electronic computer. It was a Turing-complete, digital computer capable of being reprogrammed and was running at 5,000 cycles per second for operations on the 10-digit numbers.