Decoding the Mechanisms of Antikythera Astronomical Device Decoding the Mechanisms of Antikythera Astronomical Device Jian-Liang Lin · Hong-Sen Yan
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Notes for Origins-Astro, J. Hedberg © 2018
PHY 454 - origins-astro - J. Hedberg - 2018 The Origins Of Astronomy and Astrophysics 1. Ancient Astronomy 2. A Spherical Earth 3. The Ptolemaic System 1. Ptolemy's Arrangement 4. Retrograde Motion 1. Epicycles 2. Equants 3. Ptolemaic System 5. Heliocentric 6. Geocentric vs. Heliocentric 7. Positions of Celestial Objects 1. The Altitude-Azimuth Coordinate System 2. The Equatorial Coordinate System 3. Basics of the earth's orbit 4. Celestial equator 8. Solar vs. Sidereal Time 1. Special Times of the year 2. Analemma 9. Equatorial System 10. Time 1. Julian Date 11. Summary 12. Bibliography and Further Reading Ancient Astronomy Fig. 1 A selection of ancient cosmologies. a) Ancient Egyptian Creation myth. The earth is the leaf adorned figure lying down. The sun and moon are riding the boats across the sky. b) Ancient Hebrew Conception of the universe c) Hindu: The earth was on elephants which were on turtles. (And of course a divine cobra) (public domain images) Since the earliest recorded histories, humanity has attempted to explain its position in the universe. Societies and cultures have described many varying pictures of the universe. Often, there would be some deity or certain animals involved that were responsible updated on 2018-08-29 Page 1 PHY 454 - origins-astro - J. Hedberg - 2018 for holding various parts aloft or keeping regions separate or moving things like the sun around the earth. Humans and their civilizations were almost aways located at the center of each universe.Generally there was some sorting to do - put the heavy stuff down there, the light stuff up there. -

On the Pin-And-Slot Device of the Antikythera Mechanism, with a New Application to the Superior Planets*
JHA, xliii (2012) ON THE PIN-AND-SLOT DEVICE OF THE ANTIKYTHERA MECHANISM, WITH A NEW APPLICATION TO THE SUPERIOR PLANETS* CHRISTIÁN C. CARMAN, Universidad Nacional de Quilmes/CONICET, ALAN THORNDIKE, University of Puget Sound, and JAMES EVANS, University of Puget Sound Perhaps the most striking and surprising feature of the Antikythera mechanism uncovered by recent research is the pin-and-slot device for producing the lunar inequality.1 This clever device, completely unattested in the ancient astronomical literature, produces a back-and-forth oscillation that is superimposed on a steady progress in longitude — nonuniform circular motion.2 Remarkably, the resulting motion is equivalent in angle (but not in spatial motion in depth) to the standard deferent-plus-epicycle lunar theory. Freeth et al. gave a proof of this equivalence, which is, however, a very complicated proof.3 One goal of the present paper is to offer a simpler proof that would have been well within the methods of the ancient astronomers and that, moreover, makes clearer the precise relation of the pin-and- slot model to the standard epicycle-plus-concentric and eccentric-circle theories. On the surviving portions of the Antikythera mechanism, only two devices are used to account for inequalities of motion. The first is the pin and slot, used for the lunar inequality. And the second is the nonuniform division of the zodiac scale, which, we have argued, was used to model the solar inequality.4 The second would obviously be of no use in representing planetary inequalities; so a natural question is to ask whether the pin-and-slot mechanism could be modified and extended to the planets, especially to the superior planets, for which the likely mechanical representations are less obvious than they are for the inferior planets. -

SSSS It's About Time Division C Event by Syo Astro
SSSS It’s About Time Division C Event By syo_astro Directions * Each question is worth one point, where each part (ie. a, b, etc or i, ii, etc) is worth an additional point. The test is 71 points and 30 minutes. Use space provided for answers. * The test involves various types of questions relating to time, timekeeping, astronomy, physics, and/or mechanics. * Within plus or minus 10% of a quantitative answer is considered correct. Without units and significant figures, a correct answer is given a ½ point. * Don’t be afraid to guess (logically) for partial credit where possible, and have fun! PAGE 1 1. This man came up with the idea of absolute time. 2. In 1502, who built the first pocketwatch? 3. Who invented the 1st quartz clock in 1927? 4. In 1577, who invented the first minute hand? 5. Who completed the first documented astrarium clock? 6. In what year was daylight saving time first established in the US? 7. What type of clocks are H1, H2, H3, H4, and H5? 8. What escapement is shown below? 9. Describe one common problem with the escapement below. 10. Label the following referring to the escapement below. a. b. c. d. e. f. g. h. PAGE 2 11. What is the physical purpose of the pendulum in clocks? Why is one used? 12. What clockmaker’s tool is an iron vertical plunger that can place rollers and balanced wheels on staffs? 13. Circle the fusee in the device shown below. a. What is its purpose? 14. What is a silent timekeeping instrument traditionally called? 15. -

Alexander Jones Calendrica I: New Callippic Dates
ALEXANDER JONES CALENDRICA I: NEW CALLIPPIC DATES aus: Zeitschrift für Papyrologie und Epigraphik 129 (2000) 141–158 © Dr. Rudolf Habelt GmbH, Bonn 141 CALENDRICA I: NEW CALLIPPIC DATES 1. Introduction. Callippic dates are familiar to students of Greek chronology, even though up to the present they have been known to occur only in a single source, Ptolemy’s Almagest (c. A.D. 150).1 Ptolemy’s Callippic dates appear in the context of discussions of astronomical observations ranging from the early third century B.C. to the third quarter of the second century B.C. In the present article I will present new attestations of Callippic dates which extend the period of the known use of this system by almost two centuries, into the middle of the first century A.D. I also take the opportunity to attempt a fresh examination of what we can deduce about the Callippic calendar and its history, a topic that has lately been the subject of quite divergent treatments. The distinguishing mark of a Callippic date is the specification of the year by a numbered “period according to Callippus” and a year number within that period. Each Callippic period comprised 76 years, and year 1 of Callippic Period 1 began about midsummer of 330 B.C. It is an obvious, and very reasonable, supposition that this convention for counting years was instituted by Callippus, the fourth- century astronomer whose revisions of Eudoxus’ planetary theory are mentioned by Aristotle in Metaphysics Λ 1073b32–38, and who also is prominent among the authorities cited in astronomical weather calendars (parapegmata).2 The point of the cycles is that 76 years contain exactly four so-called Metonic cycles of 19 years. -

The Geography of Ptolemy Elucidated
The Grography of Ptolemy The geography of Ptolemy elucidated Thomas Glazebrook Rylands 1893 • A brief outline of the rise and progress of geographical inquiry prior to the time of Ptolemy. §1.—Introductory. IN tracing the early progress of Geography it is necessary to remember that, like all other sciences, it arose from “ small beginnings.” When men began to move from place to place they naturally desired to tell the tale of their wanderings, both for their own satisfaction and for the information of others. Such accounts have now perished, but their results remain in the earliest records extant ; hence, it is impossible to begin an investigation into the history of Geography at the true fountain-head, though it is in some instances possible to guess the nature of the source from the character of the resultant stream. A further difficulty lies in the question as to where the science of Geography begins. A Greek would probably have answered when some discoverer first invented a method for map- ping out the distance between certain places, which distance conversely could be ascertained directly from the map. In accordance with modern method, the science of Geography might be said to begin when the subject ceased to be dealt with mythically or dogmatically ; when facts were collected and reduced to laws, while these laws again, or their prior facts, were connected with other laws—in the case of Geography with those of Mathematics and Astro- nomy. Perhaps it would be better to follow the latter principle of division, and consequently the history of Geography may be divided into two main stages—“ Pre-Scientific” and Scientific Geography—though strictly speaking, the name of Geography should be applied to the latter alone. -

The Magic of the Atwood Sphere
The magic of the Atwood Sphere Exactly a century ago, on June Dr. Jean-Michel Faidit 5, 1913, a “celestial sphere demon- Astronomical Society of France stration” by Professor Wallace W. Montpellier, France Atwood thrilled the populace of [email protected] Chicago. This machine, built to ac- commodate a dozen spectators, took up a concept popular in the eigh- teenth century: that of turning stel- lariums. The impact was consider- able. It sparked the genesis of modern planetariums, leading 10 years lat- er to an invention by Bauersfeld, engineer of the Zeiss Company, the Deutsche Museum in Munich. Since ancient times, mankind has sought to represent the sky and the stars. Two trends emerged. First, stars and constellations were easy, especially drawn on maps or globes. This was the case, for example, in Egypt with the Zodiac of Dendera or in the Greco-Ro- man world with the statue of Atlas support- ing the sky, like that of the Farnese Atlas at the National Archaeological Museum of Na- ples. But things were more complicated when it came to include the sun, moon, planets, and their apparent motions. Ingenious mecha- nisms were developed early as the Antiky- thera mechanism, found at the bottom of the Aegean Sea in 1900 and currently an exhibi- tion until July at the Conservatoire National des Arts et Métiers in Paris. During two millennia, the human mind and ingenuity worked constantly develop- ing and combining these two approaches us- ing a variety of media: astrolabes, quadrants, armillary spheres, astronomical clocks, co- pernican orreries and celestial globes, cul- minating with the famous Coronelli globes offered to Louis XIV. -

Thinking Outside the Sphere Views of the Stars from Aristotle to Herschel Thinking Outside the Sphere
Thinking Outside the Sphere Views of the Stars from Aristotle to Herschel Thinking Outside the Sphere A Constellation of Rare Books from the History of Science Collection The exhibition was made possible by generous support from Mr. & Mrs. James B. Hebenstreit and Mrs. Lathrop M. Gates. CATALOG OF THE EXHIBITION Linda Hall Library Linda Hall Library of Science, Engineering and Technology Cynthia J. Rogers, Curator 5109 Cherry Street Kansas City MO 64110 1 Thinking Outside the Sphere is held in copyright by the Linda Hall Library, 2010, and any reproduction of text or images requires permission. The Linda Hall Library is an independently funded library devoted to science, engineering and technology which is used extensively by The exhibition opened at the Linda Hall Library April 22 and closed companies, academic institutions and individuals throughout the world. September 18, 2010. The Library was established by the wills of Herbert and Linda Hall and opened in 1946. It is located on a 14 acre arboretum in Kansas City, Missouri, the site of the former home of Herbert and Linda Hall. Sources of images on preliminary pages: Page 1, cover left: Peter Apian. Cosmographia, 1550. We invite you to visit the Library or our website at www.lindahlll.org. Page 1, right: Camille Flammarion. L'atmosphère météorologie populaire, 1888. Page 3, Table of contents: Leonhard Euler. Theoria motuum planetarum et cometarum, 1744. 2 Table of Contents Introduction Section1 The Ancient Universe Section2 The Enduring Earth-Centered System Section3 The Sun Takes -

The Dark Shades of the Antikythera Mechanism
Journal of Radioanalytical and Nuclear Chemistry https://doi.org/10.1007/s10967-018-6255-9 (0123456789().,-volV)(0123456789().,-volV) The dark shades of the Antikythera Mechanism 1 2 3 Aristeidis Voulgaris • Christophoros Mouratidis • Andreas Vossinakis Received: 19 June 2018 Ó Akade´miai Kiado´, Budapest, Hungary 2018 Abstract In this work we analyze the dark shades which are evident on the AMRP X-ray positive Computed Tomographies and Radiographies of the Antikythera Mechanism ancient prototype. During 2000 years under the sea, the Mechanism bronze parts were totally corroded. The decreased X-ray absorption of the corroded bronze, allowed the CTs capture even in the thick large side of Fragment A. During the photometric analysis of the CTs, apart from corroded bronze, at least two other different (corroded) metal materials were detected, which were used by the ancient manufacturer during the construction of the Antikythera Mechanism. From our analysis and correlating with the mechanical evidence resulting by the use of our functional reconstruction models of the Antikythera Mechanism, we conclude that the existing design of the Antikythera Mechanism is probably the first of such a sophisticated design of the ancient manufacturer. Keywords Metals of Antikythera Mechanism Á Bronze corrosion Á Atacamite X-ray absorption Introduction Mechanism via the 2D X-ray and Thulium 170 radiation began by C. Karakalos of National Centre of Scientific The Antikythera Mechanism was found in 1901, in a Research ‘‘Demokritos’’ (Greece), in the 1970s. Karakalos shipwreck at 50 m depth, on a gulf of Antikythera island, took several film radiographies @160 keV [3]. The first Greece, by Symian sponge divers. -

Mg Minigears and an Ancient Geared Clock That
ADDENDUM mG miniGears Products of Padua: and an Ancient Geared Clock that Tracks Planets’ Movements Some things take time, but a magazine ad more than 600 years in the making? That’s unusual, but it’s one way of looking at the ads for mG miniGears that featured a complex, highly geared, planet- tracking clock called the Astrarium. The Addendum team had noticed the clock in miniGears’ ads in Gear Technology; the last one appeared in the Jan./Feb. ’04 issue, and the top of it is at right. But we only recently learned the story behind the clock, why the ads featured it, and how a man’s interest in the Astrarium led to the creation of two books and a CD about the ancient device. The story starts with Giovanni Dondi, who lived in 14th-century Italy, in Padua. Although a doctor, Dondi was interested in astronomy and clockmaking, so much so he designed and built the original Astrarium in the 1360s. More than a regular clock, the Astrarium uses a year wheel and a geared assembly to track the movements of the sun, moon and fi ve planets: Venus, Mercury, Saturn, Jupiter and Mars. manufacturing company there. The thinner of the books is Dondi’s Dondi didn’t include the other three The coincidence of Dondi and de’ manuscript, reproduced page by page, planets because he didn’t know about Stefani both being Paduans might have cover to cover, in full-sized color them. No one did. It’s the 14th century, come to nothing if not for one other photographs. -
Decoding the Mechanisms of Antikythera Astronomical Device Decoding the Mechanisms of Antikythera Astronomical Device Jian-Liang Lin · Hong-Sen Yan
Jian-Liang Lin · Hong-Sen Yan Decoding the Mechanisms of Antikythera Astronomical Device Decoding the Mechanisms of Antikythera Astronomical Device Jian-Liang Lin · Hong-Sen Yan Decoding the Mechanisms of Antikythera Astronomical Device 1 3 Jian-Liang Lin Hong-Sen Yan Department of Mechanical Department of Mechanical Engineering Engineering National Cheng Kung University National Cheng Kung University Tainan Tainan Taiwan Taiwan ISBN 978-3-662-48445-6 ISBN 978-3-662-48447-0 (eBook) DOI 10.1007/978-3-662-48447-0 Library of Congress Control Number: 2015950021 Springer Heidelberg New York Dordrecht London © Springer-Verlag Berlin Heidelberg 2016 This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of the material is concerned, specifcally the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, reproduction on microflms or in any other physical way, and transmission or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed. The use of general descriptive names, registered names, trademarks, service marks, etc. in this publication does not imply, even in the absence of a specifc statement, that such names are exempt from the relevant protective laws and regulations and therefore free for general use. The publisher, the authors and the editors are safe to assume that the advice and information in this book are believed to be true and accurate at the date of publication. Neither the publisher nor the authors or the editors give a warranty, express or implied, with respect to the material contained herein or for any errors or omissions that may have been made. -
Earliest Astronomical Measurements the Relative
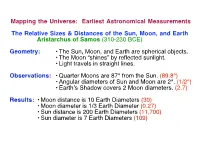
Mapping the Universe: Earliest Astronomical Measurements The Relative Sizes & Distances of the Sun, Moon, and Earth Aristarchus of Samos (310-230 BCE) Geometry: • The Sun, Moon, and Earth are spherical objects. • The Moon “shines” by reflected sunlight. • Light travels in straight lines. Observations: • Quarter Moons are 87° from the Sun. (89.8°) • Angular diameters of Sun and Moon are 2°. (1/2°) • Earth’s Shadow covers 2 Moon diameters. (2.7) Results: • Moon distance is 10 Earth Diameters (30) • Moon diameter is 1/3 Earth Diameter (0.27) • Sun distance is 200 Earth Diameters (11,700) • Sun diameter is 7 Earth Diameters (109) Aristarchus’ Methodology: Step 1: Measurement of Sun-Earth- Quarter Moon angle gives relative Earth-Sun and Earth-Moon distances (a ratio of 20:1*) Step 2: Measurement of Sun and Moon angular diameters gives relative Sun and Earth sizes on the same scale (20:1 again*) * these numbers are low by a factor of almost 20. Step 3: Adjust Earth Diameter to give the correct shadow size at the Moon’s distance. Moon Earth Sun Note that this procedure gives only relative distances and sizes. (See Eratosthenes below.) Note that Aristarchus argued for a heliocentric universe! Earliest Astronomical Measurements (continued) Eratosthenes (276-196 BCE): The Size of the Earth Digression: The Alexandrian Library (300 BCE-300 CE?) Observations • The Well at Syene & the Summer Solstice: α = 0 • The Obelisk at Alexandria: α = 1/50 circle Eratosthenes’ Methodology: Measurement • The Alexandria-Syene distance: 1,592 stadia • This corresponds to 1/50 of the Earth’s circumference Results • Earth Circumference is 1,592 x 50 = 79,600 stadia • Earth Diameter is 79,600 ÷ π = 25,337 stadia Conversion factor: 1 stadium is about 2 kilometers • Earth Diameter is 12,732 kilometers (12, 756 km) Note: Posidinius (135-51 BCE) used “simultaneous” observations of the bright star Canopus in the same way to obtain a size for the Earth. -

94 Erkka Maula
ORGANON 15 PROBLÊMES GENERAUX Erkka Maula (Finland) FROM TIME TO PLACE: THE PARADIGM CASE The world-order in philosophical cosmology can be founded upon time as well as .space. Perhaps the most fundamental question pertaining to any articulated world- view concerns, accordingly, their ontological and epistemological priority. Is the basic layer of notions characterized by temporal or by spatial concepts? Does a world-view in its development show tendencies toward the predominance of one set of concepts rather than the other? At the stage of its relative maturity, when the qualitative and comparative phases have paved the way for the formation of quantitative concepts: Which are considered more fundamental, measurements of time or measurements of space? In the comparative phase: Is the geometry of the world a geometry of motion or a geometry of timeless order? In the history of our own scientific world-view, there seems to be discernible an oscillation between time-oriented and space-oriented concept formation.1 In the dawn, when the first mathematical systems of astronomy and geography appear, shortly before Euclid's synthesis of the axiomatic thought, there were attempts at a geometry of motion. They are due to Archytas of Tarentum and Eudoxus of Cnidus, foreshadowed by Hippias of Elis and the Pythagoreans, who tend to intro- duce temporal concepts into geometry. Their most eloquent adversary is Plato, and after him the two alternative streams are often called the Heraclitean and the Parmenidean world-views. But also such later and far more articulated distinctions as those between the statical and dynamic cosmologies, or between the formalist and intuitionist philosophies of mathematics, can be traced down to the original Greek dichotomy, although additional concepts entangle the picture.