Copyrighted Material
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
ELM325 J1708 Interpreter
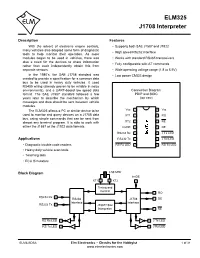
ELM325 J1708 Interpreter Description Features With the advent of electronic engine controls, • Supports both SAE J1587 and J1922 many vehicles also adopted some form of diagnostic • High speed RS232 interface tools to help monitor their operation. As more modules began to be used in vehicles, there was • Works with standard RS485 transceivers also a need for the devices to share information • Fully configurable with AT commands rather than each independently obtain this from separate sensors. • Wide operating voltage range (1.8 to 5.5V) In the 1980’s, the SAE J1708 standard was • Low power CMOS design created to provide a specification for a common data bus to be used in heavy duty vehicles. It used RS485 wiring (already proven to be reliable in noisy environments), and a UART-based low speed data Connection Diagram format. The SAE J1587 standard followed a few PDIP and SOIC years later to describe the mechanism by which (top view) messages and data should be sent between vehicle modules. The ELM325 allows a PC or similar device to be VDD 1 14 VSS used to monitor and query devices on a J1708 data XT1 2 13 RO bus, using simple commands that can be sent from almost any terminal program. It is able to work with XT2 3 12 RE either the J1587 or the J1922 data formats. InvDE 4 11 DE RS232 Rx 5 10 J Tx LED Applications RS232 Tx 6 9 J Rx LED • Diagnostic trouble code readers RS Rx LED 7 8 RS Tx LED • Heavy duty vehicle scan tools • Teaching aids • ECU Simulators Block Diagram 3.58 MHz InvDE XT12 3 XT2 4 Timing and Control 13 RO RS232 Rx 5 RS232 J1708 11 DE Interface Interface RS232 Tx 6 J1587/1922 Interpreter 12 RE RS Rx LED 7 10 J Tx LED RS Tx LED 8 9 J Rx LED ELM325DSA Elm Electronics – Circuits for the Hobbyist 1 of 31 www.elmelectronics.com ELM325 Contents Electrical Information Copyright and Disclaimer.............................................................2 Pin Descriptions.......................................................................... -
RVT-7 User's Manual
RVT-7 7” Rugged Android Vehicle Display Terminal User’s Manual Version 1.0.0 1 Revision History Version Release Time Description 1.0 2019.06 Initial Release Modify chaper 4: docking station using 1.1 2019.07 instruction 1.2 2019.08 Modify Chaper5: Accessories 1.3 2019.10 Add “3.3.3 GPIO specification” Disclaimer The information in this document is subject to change without prior notice in order to improve the reliability, design and function. It does not represent a commitment on the part of the manufacturer. Under no circumstances will the manufacturer be liable for any direct, indirect, special, incidental, or consequential damages arising from the use or inability to use the product or documentation, even if advised of the possibility of such damages. About This Manual This user’s manual provides the general information and installation instructions for the product. The manual is meant for the experienced users and integrators with hardware knowledge of personal computers. If you are not sure about any description in this manual, consult your vendor before further handling. We recommend that you keep one copy of this manual for the quick reference for any necessary maintenance in the future. Thank you for choosing Seatronx products. 2 CONTENT 1.1 Product Highlights .............................................................................................................. 7 1.2 Parts of the Device .............................................................................................................. 7 1.3 Extended Cable Definition -

Trademarks Copyright Information Disclaimer of Warranties
Trademarks Autel®, MaxiSys®, MaxiDAS®, MaxiScan®, MaxiTPMS®, MaxiRecorder®, and MaxiCheck® are trademarks of Autel Intelligent Technology Corp., Ltd., registered in China, the United States and other countries. All other marks are trademarks or registered trademarks of their respective holders. Copyright Information No part of this manual may be reproduced, stored in a retrieval system or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise without the prior written permission of Autel. Disclaimer of Warranties and Limitation of Liabilities All information, specifications and illustrations in this manual are based on the latest information available at the time of printing. Autel reserves the right to make changes at any time without notice. While information of this manual has been carefully checked for accuracy, no guarantee is given for the completeness and correctness of the contents, including but not limited to the product specifications, functions, and illustrations. Autel will not be liable for any direct, special, incidental, indirect damages or any economic consequential damages (including lost profits). IMPORTANT Before operating or maintaining this unit, please read this manual carefully, paying extra attention to the safety warnings and precautions. For Services and Support: pro.autel.com www.autel.com 1-855-287-3587/1-855-AUTELUS (North America) 0086-755-86147779 (China) [email protected] For details, please refer to the Service Procedures in this manual. i Safety Information For your own safety and the safety of others, and to prevent damage to the device and vehicles upon which it is used, it is important that the safety instructions presented throughout this manual be read and understood by all persons operating or coming into contact with the device. -

MSB-RS485 RS422/485 Protocol Analyzer Recording • Exploring • Visualizing •
MSB-RS485 Made for RS422/485 Protocol Analyzer RS485 "The perfect combination of sophisticated hardware and software analysis" ANY BUS recording • exploring • visualizing PROTOCOL • • • An essential tool for RS422/485 analysis/optimizing Product Features As an autonomous device the analyzer gathers exact information about The unerring eye into your transmission every line change with micro second precision, independent from the PC OS independent real time resolution of 1µs and its operating system and mandatory for time relevant protocols like Detects undriven signal levels (tri-state) Modbus RTU, Profibus or others. Shows the correct time relationship between all lines In addition two universal asynchronous serial channels take over the task Display the real logic changes of the two data signals of data decoding. Bus splitting allows separated watching of certain bus participants Equipped with a multitude of visualization tools it allows a detailed view of Prepared for the unexpected every transmission layer in a RS422/RS485 communication and detects Supports any baudrate from 1 Baud to 1MBaud errors coming from bus enabling, timeouts or wrong respectively double Automatic detection of baudrate, databits and parity addressing. Supports protocols with 9 data bits Detects breaks and bus faults Due to its high adaptable protocol template mechanism based on the Lua Individual protocols through highly adaptable templates and Lua script language the analyzer is not only able to visualize telegrams of common field busses - it is recommended especially for all kind of Autonomous USB device individual or closed/proprietary protocols. Independent analyzer box, controlled and sourced via USB Fast real-time signal/data processing realized in hardware Multiple connection modes allow the complete logging of all bus activities Easily adaptable to various bus systems as well as the purposeful recording of data sent from selected bus partici- Data and telegram recording with direction recognition pants. -

MSB-RS485 RS422/485 Protocol Analyzer Recording
MSB-RS485 Made for RS422/485 Protocol Analyzer RS485 "The perfect combination of sophisticated hardware and software analysis" ANY BUS recording • exploring • visualizing PROTOCOL • • • An essential tool for RS422/485 analysis/optimizing Product Features As an autonomous device the analyzer gathers exact information about The unerring eye into your transmission every line change with micro second precision, independent from the PC OS independent real time resolution of 1µs and its operating system and mandatory for time relevant protocols like Detects undriven signal levels (tri-state) Modbus RTU, Profibus or others. Shows the correct time relationship between all lines In addition two universal asynchronous serial channels take over the task Display the real logic changes of the two data signals of data decoding. Bus splitting allows separated watching of certain bus participants Equipped with a multitude of visualization tools it allows a detailed view of Prepared for the unexpected every transmission layer in a RS422/RS485 communication and detects Supports any baudrate from 1 Baud to 1MBaud errors coming from bus enabling, timeouts or wrong respectively double Automatic detection of baudrate, databits and parity addressing. Supports protocols with 9 data bits Detects breaks and bus faults Due to its high adaptable protocol template mechanism based on the Lua Individual protocols through highly adaptable templates and Lua script language the analyzer is not only able to visualize telegrams of common field busses - it is recommended especially for all kind of Autonomous USB device individual or closed/proprietary protocols. Independent analyzer box, controlled and sourced via USB Fast real-time signal/data processing realized in hardware Multiple connection modes allow the complete logging of all bus activities Easily adaptable to various bus systems as well as the purposeful recording of data sent from selected bus partici- Data and telegram recording with direction recognition pants. -

MSB-RS485 RS422/485 Protocol Analyzer
MSB-RS485 Made for RS422/485 Protocol Analyzer RS485 "The perfect combination of sophisticated hardware and software analysis" ANY BUS recording • exploring • visualizing PROTOCOL • • • An essential tool for RS422/485 analysis/optimizing Product Features As an autonomous device the analyzer gathers exact information about The unerring eye into your transmission every line change with micro second precision, independent from the PC OS independent real time resolution of 1µs and its operating system and mandatory for time relevant protocols like Detects undriven signal levels (tri-state) Modbus RTU, Profibus or others. Shows the correct time relationship between all lines In addition two universal asynchronous serial channels take over the task Display the real logic changes of the two data signals of data decoding. Bus splitting allows separated watching of certain bus participants Equipped with a multitude of visualization tools it allows a detailed view of Prepared for the unexpected every transmission layer in a RS422/RS485 communication and detects Supports any baudrate from 1 Baud to 1MBaud errors coming from bus enabling, timeouts or wrong respectively double Automatic detection of baudrate, databits and parity addressing. Supports protocols with 9 data bits Detects breaks and bus faults Due to its high adaptable protocol template mechanism based on the Lua Individual protocols through highly adaptable templates and Lua script language the analyzer is not only able to visualize telegrams of common field busses - it is recommended especially for all kind of Autonomous USB device individual or closed/proprietary protocols. Independent analyzer box, controlled and sourced via USB Fast real-time signal/data processing realized in hardware Multiple connection modes allow the complete logging of all bus activities Easily adaptable to various bus systems as well as the purposeful recording of data sent from selected bus partici- Data and telegram recording with direction recognition pants. -

ITS Standards Development Plan
ITS Standards Development Plan Prepared by: Lockheed Martin Federal Systems Odetics Intelligent Transportation Systems Division Prepared for: Federal Highway Administration US Department of Transportation Washington, D. C. 20590 June 1996 TABLE OF CONTENTS EDL# 5386 – “National ITS Architecture Documents: Communications Document; U.S. Department of Transportation” EDL# 5388 - "National ITS Architecture Documents: Executive Summary; U.S. Department of Transportation" ; EDL# 5389 - "National ITS Architecture Documents: Vision Statement: U.S. Department of Transportation" ; EDL# 5390 - "National ITS Architecture Documents: Mission Definition; U.S. Department of Transportation" ; EDL# 5391 - "National ITS Architecture Documents: Vol. 1. - Description; U.S. Department of Transportation" ; EDL# 5392 - "National ITS Architecture Documents: Vol. 2. - Process Specifications; U.S. Department of Transportation" ; EDL# 5393 - "National ITS Architecture Documents: Vol. 3. - Data Dictionary; U.S. Department of Transportation" ; EDL# 5394 - "National ITS Architecture Documents: Physical Architecture; U.S. Department of Transportation" ; EDL# 5395 - "National ITS Architecture Documents: Theory of Operations; U.S. Department of Transportation" ; EDL# 5396 - "National ITS Architecture Documents: Traceability Matrix; U.S. Department of Transportation" ; EDL# 5397 – “”National ITS Architecture Documents: Evaluatory Design; U.S. Department of Transportation” EDL# 5398 – “National ITS Architecture Documents: Cost Analysis; U.S. Department of Transportation” -

Partial Deactivation of CAN Nodes Power Saving in CAN Applications
March 2012 B 25361 CAN Newsletter Hardware + Software + Tools + Engineering Partial deactivation of CAN nodes Power saving in CAN applications Energy efficiency Partial networking for road vehicles Solutions for open networks from one source Open CAN-based protocols are the basis of networking in com- mercial vehicles, avionics and industrial control technology. Vector supports you in all development phases of these systems: > Systematic network design with CANoe, ProCANopen and CANeds > Successful implementation with source code for CANopen®, J1939 and more > Efficient configuration, test and extensive analysis with ProCANopen, CANoe and CANalyzer Multifaceted trainings and individual consulting complete our extensive offerings. Thanks to the close interlocking of the Vector tools and the competent support, you will increase the efficiency of your entire development process from design to testing. Further information, application notes and demos: www.vector.com/opennetworks Vector Informatik GmbH *HUPDQ\86$-DSDQ)UDQFH 8.6ZHGHQ&KLQD.RUHD,QGLD A personal review Holger Zeltwanger t was in 1991, at the Sys- In March 1992, we es- letter was released. It was Milestones tems exhibition in Munich tablished the CAN in Auto- a copied newsletter with I(Germany), when several PDWLRQXVHUV·DQGPDQXIDF- just a few pages. Today it 1992: CAN Newsletter companies had introduced WXUHUV·JURXSDVDQRQSURILW is a well-established print- 1992: Joint stand board-level products with association. I was elected ed magazine, and the CAN at Interkama CAN interfaces. I was in as member of the board of Newsletter Online is just in- 1992: CiA 102 those days the editor of the directors and charged to op- troduced. (physical layer) German VME- The CiA or- 1993: CiA 200 bus magazine. -
Surface Vehicle Recommended Practice
REV. SURFACE AUG2004 ® J1708 VEHICLE Issued 1986-01 RECOMMENDED Revised 2004-08 PRACTICE Superseding J1708 OCT1993 Serial Data Communications Between Microcomputer Systems in Heavy-Duty Vehicle Applications Foreword The SAE group responsible for the content of this recommended practice was revised to the SAE Low Speed Communications Network Subcommittee sponsored by the SAE Truck and Bus Electrical and Electronics Committee. This Document was revised to comply with the new SAE Technical Standards Board format. Earlier versions of this document stated: This SAE/TMC Joint Recommended Practice has been developed by the Truck and Bus Electronic Interface Subcommittee of the Truck and Bus Electrical Committee and by the S.1 Study Group of the Maintenance Council. The objectives of the subcommittee are to develop information reports, recommended practices, and standards concerned with the interface requirements and connecting devices required in the transmission of electronic signals and information among truck and bus components. Objectives: Some of the goals of the subcommittee in developing this document were to: a. Minimize hardware cost and overhead. b. Provide flexibility for expansion and technology advancements with minimum hardware and software impact on in-place assemblies. c. Utilize widely accepted electronics industry standard hardware and protocol to give designers flexibility in parts selection. d. Provide a high degree of electromagnetic compatibility. e. Provide original equipment manufacturers, suppliers, and aftermarket suppliers -
“Integration of In-Vehicle Electronics for IVHS and the Electronics for Other Vehicle Systems”
U.S. Department of Transportation. National Highway Traffic Safety Administration DOT HS 808 261 March 1995 Final Report “Integration of In-Vehicle Electronics for IVHS and the Electronics for Other Vehicle Systems” This document is available to the public from the National Technical Information Service, Springfield, Virginia 22161 This publication is distributed by the U.S. Department of Transportation, National Highway Traffic Safety Adminis- tration, in the interest of information exchange. The opinions, fiidings and conclusions expressed in this publication are those of the author(s) and not necessarily those of the Department of Transportation or the National Highway Traffic Safety Administration. The United States Government assumes no liability for its contents or use thereof. If trade or manufac- turers’ name or products are mentioned, it is because they are considered essential to the object of the publication and should not be construed as an endorsement. The United States Government does not endorse products or manufacturers. Technical Report Documentation Page 1 Report No. 2. Government Accession No. 3. Recipient’s Catalog No. DOT HS 808 261 1. Title and Subtitle 5. Report Date March 31, 1995 "Integration of In-Vehicle Electronics for IVHS and the Electronics for Other Vehicle Systems” 6. Performing Organization Code 8. Performing Organization Report No. 7. Author(s) TR95019 David Lee,Robert McOmber, Ron Bruno 3. Performing organization Name and Address 10. Work Unit No. (TRAIS) Stanford Telecommunications, Inc. 1761 Business Center Dr. 11. Contract or Grant No. Reston, Va. 22090 DTNH22-93-D-07317 13. Type of Report and Period Covered 12. Sponsoring Agency Name and Address Task Order Study National Highway Traffic Safety Administration (NHTSA) Sept. -

Tia Systems Bulletin
TIA TELECOMMUNICATIONS SYSTEMS BULLETIN Application Guidelines for TIA/EIA-485-A TSB-89-A (Revision of TSB-89) January 2006 TELECOMMUNICATIONS INDUSTRY ASSOCIATION The Telecommunications Industry Association represents the communications sector of NOTICE TIA Engineering Standards and Publications are designed to serve the public interest through eliminating misunderstandings between manufacturers and purchasers, facilitating interchangeability and improvement of products, and assisting the purchaser in selecting and obtaining with minimum delay the proper product for their particular need. The existence of such Standards and Publications shall not in any respect preclude any member or non-member of TIA from manufacturing or selling products not conforming to such Standards and Publications. Neither shall the existence of such Standards and Publications preclude their voluntary use by Non-TIA members, either domestically or internationally. Standards and Publications are adopted by TIA in accordance with the American National Standards Institute (ANSI) patent policy. By such action, TIA does not assume any liability to any patent owner, nor does it assume any obligation whatever to parties adopting the Standard or Publication. This Standard does not purport to address all safety problems associated with its use or all applicable regulatory requirements. It is the responsibility of the user of this Standard to establish appropriate safety and health practices and to determine the applicability of regulatory limitations before its use. (From Standards Proposal No. 3-3615-RV1, formulated under the cognizance of the TIA TR- 30.2 Subcommittee on DTE-DCE Interfaces). Published by TELECOMMUNICATIONS INDUSTRY ASSOCIATION Standards and Technology Department 2500 Wilson Boulevard Arlington, VA 22201 U.S.A. -

AN-915 Automotive Physical Layer SAE J1708 and the DS36277
Application Report SNLA038B–October 1993–Revised April 2013 AN-915 Automotive Physical Layer SAE J1708 and the DS36277 ..................................................................................................................................................... ABSTRACT The purpose of this application report is to give a general understanding of the J1708 recommended practice (SAE J1708) and the DS36277 transceiver that is optimized for use with Society of Automotive Engineers (SAE) J1708. Additionally, this document explains the significant differences between the DS36277 and a standard RS-485 transceiver, the DS75176B. Contents 1 Introduction .................................................................................................................. 2 2 Explanation of Terms ....................................................................................................... 2 3 Definition of TIA/EIA-485 and SAE J1708 ............................................................................... 2 4 The Society of Automotive Engineers (SAE) Recommended Practice J1708 ...................................... 2 5 J1708 Bus Loading ......................................................................................................... 3 6 Dominant Mode ............................................................................................................. 4 7 Features of the DS75176B ................................................................................................ 5 8 Features of the DS36277 .................................................................................................