Ensemble Learning with Weak Classifiers for Fast and Reliable
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Autonomous Mobile Systems for Long-Term Operations in Spatio-Temporal Environments Cedric Pradalier
Autonomous Mobile Systems for Long-Term Operations in Spatio-Temporal Environments Cedric Pradalier To cite this version: Cedric Pradalier. Autonomous Mobile Systems for Long-Term Operations in Spatio-Temporal Envi- ronments. Robotics [cs.RO]. INP DE TOULOUSE, 2015. tel-01435879 HAL Id: tel-01435879 https://hal.archives-ouvertes.fr/tel-01435879 Submitted on 20 Jan 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Distributed under a Creative Commons Attribution| 4.0 International License Autonomous Mobile Systems for Long-Term Operations in Spatio-Temporal Environments Synth`ese des travaux de recherche r´ealis´es en vue de l’obtention de l’Habilitation `aDiriger des Recherches de l’Institut National Polytechnique de Toulouse C´edric PRADALIER GeorgiaTech Lorraine – UMI 2958 GT-CNRS 2, rue Marconi 57070 METZ, France [email protected] Soutenue le Vendredi 6 Juin 2015 au LAAS/CNRS Membres du jury: Francois Chaumette, INRIA, Rapporteur Tim Barfoot, University of Toronto, Rapporteur Henrik Christensen, Georgia Institute of Technology, Rapporteur Olivier Simonin, INSA Lyon, Examinateur Roland Lenain, IRSTEA, Examinateur Florent Lamiraux, LAAS/CNRS, Examinateur Simon Lacroix, LAAS/CNRS, Examinateur Contents 1 Introduction 2 2 Autonomous mobile systems for natural and unmodified environments 4 2.1 Localization, navigation and control for mobile robotic systems . -
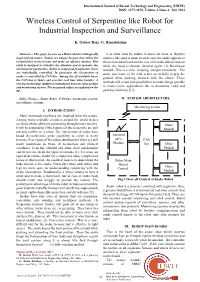
Wireless Control of Serpentine Like Robot for Industrial Inspection and Surveillance Controller, Camera Sensor Part, and Zigbee Network B
International Journal of Recent Technology and Engineering (IJRTE) ISSN: 2277-3878, Volume-2 Issue-3, July 2013 Wireless Control of Serpentine like Robot for Industrial Inspection and Surveillance K. Gafoor Raja, G. Ramakrishna Abstract— This paper focuses on a Robot which is biologically It is often used by snakes to move on loose or slippery inspired from nature. Snakes are unique because they utilize the surfaces like sand or mud, in such cases the snake appears to irregularities in the terrain and make an effective motion. This throw its head forward and the rest of its body follows motion robot is designed to visualize the situation and to measure the while the head is thrown forward again. (4) Rectilinear environment parameters. Snake is composed of segments, those method: This is a slow, creeping, straight movement. The are individually controlled. In particular the locomotion of snake uses some of the wide scales on its belly to grip the snake is controlled by CAN-bus. Among the all available buses ground while pushing forward with the others. These the CAN-bus is faster and provides real time data transfer. A methods will create new possibilities to make things possible wireless technology (ZigBee) is introduced between robot section and monitoring section. The measured values are updated on the in many rescue applications like in disastrous, risky and PC. perilous situations [11]. Index Terms— Snake Robot, CAN-bus, locomotion control, II. SYSTEM ARCHITECTURE surveillance, sensing. Monitoring section I. INTRODUCTION Many manmade machines are inspired from the nature. Among many available creatures around the world snakes are those whose ability to penetrating through many terrains. -

|||GET||| Robots 1St Edition
ROBOTS 1ST EDITION DOWNLOAD FREE John M Jordan | 9780262529501 | | | | | Building Robots with LEGO Mindstorms NXT It relied primarily on stereo vision to navigate and determine distances. Please note the delivery estimate is greater than 6 business days. Continue shopping. Mark Zug illustrator. Illustrator: Hoban, Robots 1st edition. But the large drum memory made programming time-consuming and Robots 1st edition. Technological unemployment Terrainability Fictional robots. The robot opened up a beer, struck a golfball to its target and even conducted the shows band. First edition, first printing. Commercial and industrial robots are now in widespread use performing jobs more cheaply or with greater accuracy and reliability than humans. Condition: Very Good. For additional information, see the Global Shipping Program terms and conditions - opens in a new window or tab This amount includes applicable customs duties, taxes, Robots 1st edition and other fees. In new protective mylar. Condition: Good. Institutional Subscription. Got one to sell? The robot could move its hands and head and could be controlled by remote control or voice control. Add to Watchlist. From Wikipedia, the free encyclopedia. Seller Image. Graduate students, researchers, academics and professionals in the areas of human Robots 1st edition, robotics, social psychology, and engineering psychology. General Motors had left all its competition behind in the dust with the sheer number of cars it was producing. Users can choose from seven factory presets for tunings, six of which are editable. Himber Lebanon, NJ, U. Printing Year see all. The ultimate attempt at automation was The Turk by Wolfgang von Kempelena sophisticated machine that could play chess against a human opponent and toured Europe. -

Walking Machines: 0-Legged-Robots
limbless mobile robots file:///E|/Eigene Dateien/Leonardo/Stud...NoLegs-CD/RoboterLaufenNoLegsLocal.html Walking machines: 0-legged-robots (only snake-like robots, so far) A compilation by Christian Düntgen Pictorial Overview on Crawling Robots ACM III KORYU I KORYU II OBLIX Chabin's snake GMD-Snake GMD-Snake2 JPL-Snake Mita-Lab Snake NEC-'Quake'-Snake Snakey Shan's Snake 1 of 16 26.08.00 18:45 limbless mobile robots file:///E|/Eigene Dateien/Leonardo/Stud...NoLegs-CD/RoboterLaufenNoLegsLocal.html ATMS KAA Snake 'Henrietta' JHU Metamorphical Robot Model I. Motivation Snakes populate wide regions of our planet. They use different methods to move within varying environments (sand, water, solid surface, within trees, ...). They can even climb obstacles and pass rough, smooth and slippery surfaces. Robotic snake might be used to inspect pipes and underground locations or to explore rough territories. As snakes have a lot of degrees of freedoms, their construction pattern is interesting for manipulators e.g. to work with dangerous materials. Snake-like architectures' high degree of freedoms and allow three-dimensional locomotion and a lot of other tasks as gripping, moving or transporting objects with the body. Advantages of snake like motion 1. Terrainability Snake like robots can traverse rough terrain: they can climb steps whose heights approach its longest linear dimension, pass soft or viscous materials, span gasps, etc. 2. Traction Snakes can use almost their full bodylenght to apply forces to the ground. 3. Efficiency Low costs of body support, no cost of limb motion. But: high friction losses, lateral accelerations of the body. -

Autonomous Navigation Field Results of a Planetary Analog Robot in Antarctica
AUTONOMOUS NAVIGATION FIELD RESULTS OF A PLANETARY ANALOG ROBOT IN ANTARCTICA Stewart Moorehead, Reid Simmons, Dimitrios Apostolopoulos and William "Red" Whittaker The Robotics Institute Carnegie Mellon University 5000 Forbes Ave. Pittsburgh, PA. 15213 U.S.A. phone: 1-412-268-7086, fax: 1-412-268-5895, email: [email protected] phone: 1-412-268-262 1, fax: 1-412-268-5576, email: [email protected] phone: 1-412-268-7224, fax: 1-412-268- 1488, email: [email protected] phone: 1-412-268-6556, fax: 1-412-682-1 793, email: [email protected] ABSTRACT tion in polar terrain and meteorite detection/classification 191. Experiments were also performed on characterizing The Robotic Antarctic Meteorite Search at Curnegie Mel- laser and stereo sensors [14], systematic patterned search lon is developing robotic technologies to allow for auton- [lo], ice and snow mobility, landmark based navigation omous seart.h and class$cation of meteorites in and millimeter wave radar [I]. Foot search by the expedi- Antarctica. In November 1998, the robot Nomad was tion found two meteorites [5]. r1eployc.d in the Patriot Hills region of Antarctica to per- ,form several demonstrations and experiments of these technologies in a polar environment. Nomad drove 10.3km autonomously in Antarctica under a variety of weather and terrain conditions. This paperpre- sents the results of this traverse, the ability of stereo ~lisionand laser scanner to perceive polar terrain and the rlutonomous navigation system used. 1 INTRODUCTION From the Lunakhods on the Moon to Sojourner on Mars 161, mobile robots have demonstrated their usefulness to planetary exploration. -

Insect-Computer Hybrid System for Autonomous Search and Rescue Mission
Insect-Computer Hybrid System for Autonomous Search and Rescue Mission Hirotaka Sato ( [email protected] ) Nanyang Technological University P. Thanh Tran-Ngoc Nanyang Technological University Le Duc Long Nanyang Technological University Bing Sheng Chong Nanyang Technological University H. Duoc Nguyen Nanyang Technological University V. Than Dung Nanyang Technological University Feng Cao Nanyang Technological University Yao Li Harbin Institute of Technology Kazuki Kai Nanyang Technological University Jia Hui Gan Nanyang Technological University T. Thang Vo-Doan University of Freiburg T. Luan Nguyen University of Leeds Physical Sciences - Article Keywords: Disaster-hit Areas, Power Consumption, Locomotion Computation Load, Obstacle-avoidance System, Navigation Control Algorithm, Human Presence Detection Posted Date: June 12th, 2021 DOI: https://doi.org/10.21203/rs.3.rs-598481/v1 License: This work is licensed under a Creative Commons Attribution 4.0 International License. Read Full License Insect-Computer Hybrid System for Autonomous Search and Rescue Mission P. Thanh Tran-Ngoc1, D. Long Le1, Bing Sheng Chong1, H. Duoc Nguyen1, V. Than Dung1, Feng Cao1, Yao Li2, Kazuki Kai1, Jia Hui Gan1, T. Thang Vo-Doan3, T. Luan Nguyen4, and Hirotaka Sato1* 1School of Mechanical & Aerospace Engineering, Nanyang Technological University; 50 Nanyang Avenue, 639798, Singapore 2School of Mechanical Engineering and Automation, Harbin Institute of Technology, Shenzhen; University Town, Shenzhen, 518055, China 3University of Freiburg; Hauptstrasse. 1, Freiburg, 79104, Germany 4University of Leeds; Woodhouse, Leeds LS2 9JT, United Kingdom *Corresponding author. Email: [email protected] Abstract: There is still a long way to go before artificial mini robots are really used for search and rescue missions in disaster-hit areas due to hindrance in power consumption, computation load of the locomotion, and obstacle-avoidance system. -
Systematic Configuration of Robotic Locomotion Dimitrios Apostolopoulos Carnegie Mellon University
Carnegie Mellon University Research Showcase @ CMU Robotics Institute School of Computer Science 1996 Systematic Configuration of Robotic Locomotion Dimitrios Apostolopoulos Carnegie Mellon University Follow this and additional works at: http://repository.cmu.edu/robotics Part of the Robotics Commons This Technical Report is brought to you for free and open access by the School of Computer Science at Research Showcase @ CMU. It has been accepted for inclusion in Robotics Institute by an authorized administrator of Research Showcase @ CMU. For more information, please contact [email protected]. Systematic Configuration of Robotic Locomotion Dimitrios Apostolopoulos CMU-RI-TR-96-30 The Robotics Institute Carnegie Mellon University Pittsburgh, Pennsylvania 15213 July 26, 1996 1996 Dimitrios Apostolopoulos & Carnegie Mellon University This research was sponsored by NASA under grant NAGW-3863. The views and conclusions contained in this document are those of the author and should not be interpreted as representing the official, either expressed or implied, of NASA or the United States Government. Abstract Configuration of robotic locomotion is a process that formulates, rationalizes and validates the robot’s mobility system. The configuration design describes the type and arrangement of traction elements, chassis geometry, actuation schemes for driving and steering, articulation and suspension for three-dimensional motions on terrain. These locomotion attributes are essential to position and move the robot and to negotiate terrain. However, configuration of robotic locomotion does not just involve the electromechanical aspects of design. As such, configuration of robotic locomotion should also be responsive to the issue of robotability, which is the ability to accommodate sensing and teleoperation, and to execute autonomous planning in a reliable and efficient manner. -

Abstract Design and Analysis of Exaggerated Rectilinear
ABSTRACT Title of Document: DESIGN AND ANALYSIS OF EXAGGERATED RECTILINEAR GAIT-BASED SNAKE-INSPIRED ROBOTS James Kendrick Hopkins Doctor of Philosophy, 2014 Dissertation directed by: Professor S. K. Gupta Department of Mechanical Engineering Snake-inspired locomotion is much more maneuverable compared to conventional locomotion concepts and it enables a robot to navigate through rough terrain. A rectilinear gait is quite flexible and has the following benefits: functionality on a wide variety of terrains, enables a highly stable robot platform, and provides pure undulatory motion without passive wheels. These benefits make rectilinear gaits especially suitable for search and rescue applications. However, previous robot designs utilizing rectilinear gaits were slow in speed and required considerable vertical motion. This dissertation will explore the development and implementation of a new exaggerated rectilinear gait that which will enable high speed locomotion and more efficient operation in a snake-inspired robot platform. The exaggerated rectilinear gait will emulate the natural snake’s rectilinear gait to gain the benefit a snake’s terrain adaptability, but the sequence and range of joint motion will be greatly exaggerated to achieve higher velocities to support robot speeds within the range of human walking speed. The following issues will be investigated in this dissertation. First, this dissertation will address the challenge of developing a snake-inspired robot capable of executing exaggerated rectilinear gaits. To successfully execute the exaggerated rectilinear gait, a snake-inspired robot platform must be able to perform high speed linear expansion/contraction and pivoting motions between segments. In addition to high speed joint motion, the new mechanical architecture much also incorporate a method for providing positive traction during gait execution. -

Instrumentation and Application of Unmanned Ground Vehicles for Magnetic Surveying
Instrumentation and application of unmanned ground vehicles for magnetic surveying By Andrew Hay A thesis submitted to the Faculty of Graduate and Postdoctoral Affairs in partial fulfillment of the requirements for the degree of Master of Science In Earth Sciences Department of Earth Sciences, Carleton University, Ottawa, Ontario ©Copyright - Andrew Hay, 2017 i Abstract With the recent proliferation of unmanned aerial vehicles (UAV) for geophysical surveying a novel opportunity exists to develop unmanned ground vehicles (UGV) in parallel. This research presents a pilot study to integrate two UGVs, the Kapvik planetary micro-rover and a Husky A200 robotic development platform, with a GSMP 35U magnetometer that has recently been developed for the UAV market. Magnetic noise levels generated by the UGVs in laboratory and field conditions are estimated using the fourth difference method and, at a magnetometer-UGV separation distance of 121 cm, the Kapvik micro-rover was found to generate a noise envelope ± 0.04 nT whereas the noisier Husky UGV generated an envelope of ± 3.94 nT. The UGVs were assessed over a series of successful robotic mapping missions which demonstrated their capability for magnetic mapping, and their productivity and versatility in field conditions. ii Acknowledgements I would first like to thank my supervisor, Dr. Claire Samson, for her tireless support and confidence in the development of this project from start to finish. Dr. Samson’s expertise in applied geophysical methods, skill as an editor, and focus on project goals ensured that this experience would be a success. For allowing me the freedom and opportunity to explore research blending the fields of geophysical exploration and robotics, I am eternally grateful. -

Tessellator Robot Design Document
Tessellator Robot Design Document Kevin Dowling 22 August 2002 CMU-TR-RI-95-43 Robotics Institute Carnegie Mellon University Pittsburgh, Pennsylvania 15213-3890 Abstract This report documents the preliminary design for a mobile manipulator system to service the Space Shuttle. This doc- ument arose from the Mobile Robot Design Course in the Spring of 1991 held at Carnegie Mellon’s Robotics Insti- tute. A wide number of issues are addressed including mechanical configuration and design, software and hardware architectures, sensing, power, planning and a number of design process issues as well. Many comparisons and analy- ses are presented and much of this work helped formulate decisions and designs in the eventual robot system, the Tes- sellator. This research was partially supported by NASA NAGW-1175. The views and conclusions contained in this document are those of the authors and should not be interpreted as representing the official policies, either expressed or implied, of NASA or the U.S. government. ACM Computing Reviews Keywords: 1.2.10 Vision and Scene Understanding, 1.2.9 Robotics, 1.4.6 Segmentation, 1.4.8 Scene Analysis, 1.4.1 Digitization 1. Introduction 9 1.1 Background 9 1.2 Document Outline 10 1.3 Design Process 11 1.3.1 End of Year Demonstration 11 2. Design Specifications and Constraints 13 2.1 Facility Constraints 13 2.1.1 Orbiter Processing Facility 14 2.1.2 Mate-Demate Device 16 2.2 Environmental and Safety Issues 16 2.3 Summary 20 3. Task Scenarios 23 3.1 Deployment 24 3.2 Robot Repositioning 25 3.3 Global Positioning 26 3.4 Local Positioning 26 3.5 Tile Servicing 26 3.6 Stowage 28 3.7 Exception Conditions 28 3.7.1 Minor Exceptions 28 3.7.2 Major Exceptions 30 3.8 Summary 31 4. -

'A Review Study on Future Applicability of Snake Robots in India'
IOSR Journal of Computer Engineering (IOSR-JCE) e-ISSN: 2278-0661,p-ISSN: 2278-8727, Volume 17, Issue 5, Ver. I (Sep. – Oct. 2015), PP 03-06 www.iosrjournals.org ‘A Review Study on Future Applicability of Snake Robots in India’ Nidhi Chaudhry1, Shruti Sharma2 1 (Department of Journalism & Mass Communication, Maharaja Agrasen Institute of Management Studies, GGSIP University, India) 2 1 (Department of Computer Science, Maharaja Agrasen Institute of Management Studies, GGSIP University, India) Abstract: In this study we to aim to present an overview of features of snake robots and their application across various fields. Snakes is blessed with a unique feature of moving over or climbing all most all kind of terrains, rough, muddy, watery, narrow cracks, tall trees and this unique mobility feature have inspired the creation of ‘Snake Robots’. Snake robots can work as a wonder to reach challenging and cluttered environments where it is impossible or too dangerous or narrow for human beings to operate. Snake robot is an innovation that has a great scope in India. Snake robots, thus, holds a lot in future and great scope for India. Snake robots can be used in various fields like agriculture, sanitation, fire fighting, surveillance and maintenance of complex and possibly dangerous structures or systems such as nuclear plants or pipelines, intelligent services, media, exploration, research, education, military, disaster management, and rescue & search operations. These unique features and degrees of freedom of snake robots make them fascinating topic for research and is worth investment & applicability. With further innovations, the potential of snake robots can be exploited and give way to infinite applications. -

The Robotic Autonomy Mobile Robotics Course: Robot Design, Curriculum Design and Educational Assessment
The Robotic Autonomy Mobile Robotics Course: Robot Design, Curriculum Design and Educational Assessment Illah R. Nourbakhsha, Kevin Crowleyb, Ajinkya Bhavea, Emily Hamnera, Thomas Hsiuc, Andres Perez-Bergquista, Steve Richardsd, Katie Wilkinsonb a The Robotics Institute, Carnegie Mellon University, Pittsburgh, PA 15213 b Learning Research and Development Ctr, Univ. of Pittsburgh, Pittsburgh, PA 15260 c Gogoco, LLC. Sunnyvale, CA 94086 d Acroname, Inc. Boulder, CO 80303 Abstract Robotic Autonomy is a seven-week, hands-on introduction to robotics designed for high school students. The course presents a broad survey of robotics, beginning with mechanism and electronics and ending with robot behavior, navigation and remote teleoperation. During the summer of 2002, Robotic Autonomy was taught to twenty eight students at Carnegie Mellon West in cooperation with NASA/Ames (Moffett Field, CA). The educational robot and course curriculum were the result of a ground-up design effort chartered to develop an effective and low-cost robot for secondary level education and home use. Cooperation between Carnegie Mellon’s Robotics Institute, Gogoco, LLC. and Acroname Inc. yielded notable innovations including a fast-build robot construction kit, indoor/outdoor terrainability, CMOS vision-centered sensing, back-EMF motor speed control and a Java-based robot programming interface. In conjunction with robot and curriculum design, the authors at the Robotics Institute and the University of Pittsburgh’s Learning Research and Development Center planned a methodology for evaluating the educational efficacy of Robotic Autonomy, implementing both formative and summative evaluations of progress as well as an in- depth, one week ethnography to identify micro-genetic mechanisms of learning that would inform the broader evaluation.