Small Satellites and Rpas in Global-Change Research
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Cfa in the News ~ Week Ending 3 January 2010
Wolbach Library: CfA in the News ~ Week ending 3 January 2010 1. New social science research from G. Sonnert and co-researchers described, Science Letter, p40, Tuesday, January 5, 2010 2. 2009 in science and medicine, ROGER SCHLUETER, Belleville News Democrat (IL), Sunday, January 3, 2010 3. 'Science, celestial bodies have always inspired humankind', Staff Correspondent, Hindu (India), Tuesday, December 29, 2009 4. Why is Carpenter defending scientists?, The Morning Call, Morning Call (Allentown, PA), FIRST ed, pA25, Sunday, December 27, 2009 5. CORRECTIONS, OPINION BY RYAN FINLEY, ARIZONA DAILY STAR, Arizona Daily Star (AZ), FINAL ed, pA2, Saturday, December 19, 2009 6. We see a 'Super-Earth', TOM BEAL; TOM BEAL, ARIZONA DAILY STAR, Arizona Daily Star, (AZ), FINAL ed, pA1, Thursday, December 17, 2009 Record - 1 DIALOG(R) New social science research from G. Sonnert and co-researchers described, Science Letter, p40, Tuesday, January 5, 2010 TEXT: "In this paper we report on testing the 'rolen model' and 'opportunity-structure' hypotheses about the parents whom scientists mentioned as career influencers. According to the role-model hypothesis, the gender match between scientist and influencer is paramount (for example, women scientists would disproportionately often mention their mothers as career influencers)," scientists writing in the journal Social Studies of Science report (see also ). "According to the opportunity-structure hypothesis, the parent's educational level predicts his/her probability of being mentioned as a career influencer (that ism parents with higher educational levels would be more likely to be named). The examination of a sample of American scientists who had received prestigious postdoctoral fellowships resulted in rejecting the role-model hypothesis and corroborating the opportunity-structure hypothesis. -

Annual Report 2014-2015
2014 2015 Annual Report Table of Contents 2/3 The International Space Science Institute (ISSI) is an Institute of Advanced Studies where scientists from all over the world meet in a multi- and interdisciplinary setting to reach out for new scientific horizons. The main function is to contribute to the achievement of a deeper understanding of the re- sults from different space missions, ground based observations and laboratory experiments, and add- ing value to those results through multidisciplinary research. The program of ISSI covers a widespread spectrum of disciplines from the physics of the solar system and planetary sciences to astrophysics and cosmology, and from Earth sciences to astrobiology. 4 From the Board of Trustees 20 International Teams 5 From the Directors 37 International Teams approved in 2015 6 About the International Space Science Institute 39 Visiting Scientists 7 The Board of Trustees 41 International Space Science Institute Beijing 8 The Science Committee 42 Events and ISSI in the media at a glance (including centerfold) 9 ISSI Staff 44 Staff Activities 10 Facilities 48 Staff Publications 11 Financial Overview 51 Visitor Publications 12 The Association Pro ISSI 61 Space Sciences Series of ISSI (SSSI) 13 Scientific Activities: The 20th Year 66 ISSI Scientific Reports Series (SR) 14 Forum 67 Pro ISSI SPATIUM Series 15 Workshops 68 ISSI Publications in the 20th Business Year ISSI Annual Report 2014 | 2015 From the Board of Trustees One year ago the undersigned was appointed by the President as secretary of the Board, succeeding Kathrin Altwegg who had served in that capacity for six years. -
Mass Spectrometry of Astrobiologically Relevant Organic Material – Implications on Future Space Missions to Ocean Worlds in the Outer Solar System
Mass Spectrometry of Astrobiologically Relevant Organic Material – Implications on Future Space Missions to Ocean Worlds in the Outer Solar System Fabian Klenner1, Frank Postberg1, Ferdinand Stolz2, René Reviol1, and Nozair Khawaja1 1Institute of Earth Sciences, Heidelberg University, Germany 2Wilhelm-Ostwald-Institute, Leipzig University, Germany 51st ESLAB Symposium - Extreme Habitable Worlds ESA ESTEC, The Netherlands The Solar System‘s ocean worlds Steve Vance; NASA/JPL-Caltech December 6, 2017 2 The Solar System‘s ocean worlds Steve Vance; NASA/JPL-Caltech December 6, 2017 3 Sampling dust and ice particles in space E ring NASA/JPL December 6, 2017 4 The Cosmic Dust Analyzer (CDA) Chemical Analyzer subsystem (CA) § Sensitive to cations § Determines impact rates, mass, speed, electric charge, and composition § Mass resolution: ≤ 50 m/Dm § Maximum recorded mass: ca. 200 u Srama et al. 2004 December 6, 2017 5 Analog experiment: IR-FL-MALDI-ToF-MS IR Laser adapted from Beinsen 2011 § Liquid beam: r = 7.5 µm § Laser: l = 2480 nm; I ≤ 1152 MW/cm2 § Vaccum chamber: P = 5 x 10-5 mbar § ToF-MS: R = 700 – 800 m/Dm December 6, 2017 6 Comparison of the impact mechanisms of CDA and the analog experiment CDA Analog experiment Postberg et al. 2009 December 6, 2017 7 Comparison of the impact mechanisms of CDA and the analog experiment CDA Analog experiment Postberg et al. 2009 Khawaja 2016 December 6, 2017 8 Future missions and Enceladus Ice Analyzer (ENIA) § Sensitive to cations and anions § Mass resolution > 2000 m/Dm § Maximum recorded mass: 2000 -

Uranian and Saturnian Satellites in Comparison
Compara've Planetology between the Uranian and Saturnian Satellite Systems - Focus on Ariel Oberon Umbriel Titania Ariel Miranda Puck Julie Cas'llo-Rogez1 and Elizabeth Turtle2 1 – JPL, California Ins'tute of Technology 2 – APL, John HopKins University 1 Objecves Revisit observa'ons of Voyager in the Uranian system in the light of Cassini-Huygens’ results – Constrain planetary subnebula, satellites, and rings system origin – Evaluate satellites’ poten'al for endogenic and geological ac'vity Uranian Satellite System • Large popula'on • System architecture almost similar to Saturn’s – “small” < 200 Km embedded in rings – “medium-sized” > 200 Km diameter – No “large” satellite – Irregular satellites • Rela'vely high albedo • CO2 ice, possibly ammonia hydrates Daphnis in Keeler gap Accre'on in Rings? Charnoz et al. (2011) Charnoz et al., Icarus, in press) Porco et al. (2007) ) 3 Ariel Titania Oberon Density(kg/m Umbriel Configuraon determined by 'dal interac'on with Saturn Configura'on determined by 'dal interac'on within the rings Distance to Planet (Rp) Configuraon determined by Titania Oberon Ariel 'dal interac'on with Saturn Umbriel Configura'on determined by 'dal interac'on within the rings Distance to Planet (Rp) Evidence for Ac'vity? “Blue” ring found in both systems Product of Enceladus’ outgassing ac'vity Associated with Mab in Uranus’ system, but source if TBD Evidence for past episode of ac'vity in Uranus’ satellite? Saturn’s and Uranus’ rings systems – both planets are scaled to the same size (Hammel 2006) Ariel • Comparatively low -

Institut Für W El Tra Umforschung
WWW.OEAW.AC.AT ANNUAL REPORT 2015 IWF – INSTITUT FÜR WELTRAUMFORSCHUNG FÜR INSTITUT – IWF ANNU- AL ANNUAL REPORT 2015 COVER IMAGE NASA‘s MMS mission will solve the mystery of reconnecting magnetic fields around Earth Credits:( NASA). TABLE OF CONTENTS INTRODUCTION ......................................................................................................................................................................5 EARTH & MOON ....................................................................................................................................................................... 7 GRAVITY FIELD ...................................................................................................................................................................... 7 GEODYNAMICS .....................................................................................................................................................................8 ATMOSPHERE ........................................................................................................................................................................9 SATELLITE LASER RANGING ............................................................................................................................................9 NEAR-EARTH SPACE .............................................................................................................................................................12 SOLAR SYSTEM ........................................................................................................................................................................17 -
Perfect Little Planet Educator's Guide
Educator’s Guide Perfect Little Planet Educator’s Guide Table of Contents Vocabulary List 3 Activities for the Imagination 4 Word Search 5 Two Astronomy Games 7 A Toilet Paper Solar System Scale Model 11 The Scale of the Solar System 13 Solar System Models in Dough 15 Solar System Fact Sheet 17 2 “Perfect Little Planet” Vocabulary List Solar System Planet Asteroid Moon Comet Dwarf Planet Gas Giant "Rocky Midgets" (Terrestrial Planets) Sun Star Impact Orbit Planetary Rings Atmosphere Volcano Great Red Spot Olympus Mons Mariner Valley Acid Solar Prominence Solar Flare Ocean Earthquake Continent Plants and Animals Humans 3 Activities for the Imagination The objectives of these activities are: to learn about Earth and other planets, use language and art skills, en- courage use of libraries, and help develop creativity. The scientific accuracy of the creations may not be as im- portant as the learning, reasoning, and imagination used to construct each invention. Invent a Planet: Students may create (draw, paint, montage, build from household or classroom items, what- ever!) a planet. Does it have air? What color is its sky? Does it have ground? What is its ground made of? What is it like on this world? Invent an Alien: Students may create (draw, paint, montage, build from household items, etc.) an alien. To be fair to the alien, they should be sure to provide a way for the alien to get food (what is that food?), a way to breathe (if it needs to), ways to sense the environment, and perhaps a way to move around its planet. -
Apollo 11 Goodwill Messages
FOR RELEASE: SUNDAY July 13, 1969 RELEASE NO: 69-83F . .. -. I. APOLLO 11 GOODWILL MESSAGES A small disc carrying statements by Presidents Eisenhower, Kennedy,. Johnson and Nixon and messages of goodwill from lead- ers of 73 countries around the world will be left on the Moon by the Apollo 11 astronauts. The disc also carries a listing of the leadership of the Congress and a listing of members of the four committees of the House and Senate responsible for the National Aeronautics and . Space Administration legislation. Additionally, the names of NASA's top management, including past Administrators and Deputy Administrators, and the present NASA management are included. These include NASA's first Administrator, Dr. T. Keith Glennan; its long-time Deputy Administrator, the late Dr. Hugh L. Dryden; former Administr>ator James E. Webb; and former Deputy Administrator, Dr. Robert C. Seamans, Jr., present Secretary of the Air Force. -more- 7/11/69 -%? ,,, , , . -2- Dr. Thomas 0 Paine is the present NASA Administrator. The disc, about the size of a 50-cent piece, is made of silicon -- ,a non-metallic chemical element found abundantly in nature and used widely im modern electronics. Through a process used to make microminiature electronic circuits, the statements, the messages, and names were etched (sn the grey-colored disc. Each message was reduced 200 times to a size rnuch smaller than the head of a !)in (0.0425 x 0.055 inches) and appears on the disc as a barely visible dot. NASA':; Electronics Research Center at Cambridge, Mass., was assisted by the Sprague Electric Company's Serci-Conductor Division, Worcester, Mass., in preparing the historic disc. -

Irregular Satellites of the Giant Planets 411
Nicholson et al.: Irregular Satellites of the Giant Planets 411 Irregular Satellites of the Giant Planets Philip D. Nicholson Cornell University Matija Cuk University of British Columbia Scott S. Sheppard Carnegie Institution of Washington David Nesvorný Southwest Research Institute Torrence V. Johnson Jet Propulsion Laboratory The irregular satellites of the outer planets, whose population now numbers over 100, are likely to have been captured from heliocentric orbit during the early period of solar system history. They may thus constitute an intact sample of the planetesimals that accreted to form the cores of the jovian planets. Ranging in diameter from ~2 km to over 300 km, these bodies overlap the lower end of the presently known population of transneptunian objects (TNOs). Their size distributions, however, appear to be significantly shallower than that of TNOs of comparable size, suggesting either collisional evolution or a size-dependent capture probability. Several tight orbital groupings at Jupiter, supported by similarities in color, attest to a common origin followed by collisional disruption, akin to that of asteroid families. But with the limited data available to date, this does not appear to be the case at Uranus or Neptune, while the situa- tion at Saturn is unclear. Very limited spectral evidence suggests an origin of the jovian irregu- lars in the outer asteroid belt, but Saturn’s Phoebe and Neptune’s Nereid have surfaces domi- nated by water ice, suggesting an outer solar system origin. The short-term dynamics of many of the irregular satellites are dominated by large-amplitude coupled oscillations in eccentricity and inclination and offer several novel features, including secular resonances. -

Laboratory Experiments Recreating Icy Moons' Geysers
EPSC Abstracts Vol. 13, EPSC-DPS2019-1789-1, 2019 EPSC-DPS Joint Meeting 2019 c Author(s) 2019. CC Attribution 4.0 license. Laboratory experiments recreating icy moons’ geysers Stephanie Cazaux (1,2), Ferdinand Schrijer (1) and Bernd Dachwald (3) Fabian Baader (3) (1) Faculty of Aerospace Engineering, Delft University of Technology, Kluyverweg 1, 2629 HS, Delft, The Netherlands ([email protected]) (2) University of Leiden, P.O. Box 9513, 2300 RA, Leiden, The Netherlands (3) Aachen University of Applied Sciences, 52064 Aachen, Germany 2. Experimental procedure We are developing an experimental setup to verify Abstract experimentally that under the icy moon’s conditions (pressure, temperature) a plume reaches hypersonic/supersonic velocities, The Cassini mission revealed the presence of plumes on and will determine how the ocean (liquid water) translates into Enceladus and showed the chemical complexity present in plume (compare composition). We designed and build a these environments. The plumes are supposed to represent the reservoir where liquid water can be frozen, mimicking the composition of the Ocean, but how plumes and the ocean are moon’s icy crust. A mould, introduced in the reservoir and linked has been addressed by theories [1,2] but not yet removed once the water is frozen, simulates the crevasse. The experimentally. By recreating plumes in laboratory, we aim to mould is designed such as to establish the apply reverse engineering by understanding how the content of hypersonic/supersonic velocities in the plumes. The bottom of the plumes, which has been extensively observed by Cassini, the reservoir contains liquid water corresponding to the sub- reflects the conditions in the ocean. -
Solar System Tables
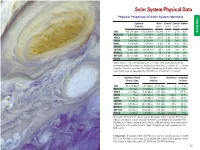
Solar System Physical Data Physical Properties of Solar System Members S o l a Equatorial Mass1 Density2 Gravity3 Albedo4 r S Diameter Earth=1 H O=1 Earth=1 y 2 s t e SUN 865,278 miles 1,392,530 km 332,946 1.41 27.9 n/a m MERCURY 3,032 miles 4,879 km 0.055 5.43 0.38 11% VENUS 7,521 miles 12,104 km 0.815 5.25 0.90 65% EARTH 7,926 miles 12,756 km 1 5.52 1.00 37% MARS 4,228 miles 6,805 km 0.107 3.95 0.38 15% JUPITER 88,844 miles 142,980 km 317.8 1.33 2.53 52% SATURN 74,900 miles5 120,540 km5 95.2 0.69 1.06 47% URANUS 31,764 miles 51,120 km 14.5 1.29 0.90 51% NEPTUNE 30,777 miles 49,530 km 17.2 1.64 1.14 41% PLUTO 1,433 miles 2,306 km 0.0025 2.03 0.08 30% 1Earth’s mass is 1.32 x 1025 pounds (5.97 x 1024 kg). 2Density per unit volume as compared to water. For comparsion, the density of alumium is 2.7 and iron is 7.7. 3Gravity at equator. 4Albedo is the amount of sunlight reflected by the Planet. 5Saturn without rings. Visible rings are approximately 170,000 miles (273,600 km) in diameter. Rotational Period Escape Oblateness2 Inclination (Planet’s Day) Velocity1 to Orbit3 SUN 25 to 35 days4 384 miles/s 617.5 km/s 0 7.2 5 ∞ MERCURY 58.7 days 2.6 miles/s 4.2 km/s 0 0.0 ∞ VENUS 243.0 days 6.5 miles/s 10.4 km/s 0 177.4 ∞ EARTH 1 day 6.96 miles/s 11.2 km/s 0.34% 23.4 ∞ MARS 24.62 hours 3.1 miles/s 5.0 km/s 0.74% 25.2 ∞ JUPITER 9.84 hours 37 miles/s 59.5 km/s 6.5% 3.1 ∞ SATURN 10.23 hours 22.1 miles/s 35.5 km/s 9.8% 25.3 ∞ URANUS 17.9 hours 13.2 miles/s 21.3 km/s 2.3% 97.9 ∞ NEPTUNE 19.2 hours 14.6 miles/s 23.5 km/s 1.7% 28.3 ∞ PLUTO 6.4 days 0.8 miles/s 1.3 km/s unknown 123 ∞ 1At equator. -

MOONS of OUR SOLAR SYSTEM Last Updated June 8, 2017 Since
MOONS OF OUR SOLAR SYSTEM last updated June 8, 2017 Since there are over 150 known moons in our solar system, all have been given names or designations. The problem of naming is compounded when space pictures are analyzed and new moons are discovered (or on rare occasions when spacecraft images of small, distant moons are found to be imaging flaws, and a moon is removed from the list). This is a list of the planets' known moons, with their names or other designations. If a planet has more than one moon, they are listed from the moon closest to the planet to the moon farthest from the planet. Since the naming systems overlap, many moons have more than one designation; in each case, the first identification listed is the official one. MERCURY and VENUS have no known moons. EARTH has one known moon. It has no official name. MARS has two known moons: Phobos and Deimos. ASTEROIDS (Small moons have now been found around several asteroids. In addition, a growing number of asteroids are now known to be binary, meaning two asteroids of about the same size orbiting each other. Whether there is a fundamental difference in these situations is uncertain.) JUPITER has 69 known moons. Names such as “S/2003 J2" are provisional. Metis (XVI), Adrastea (XV), Amalthea (V), Thebe (XIV), Io (I), Europa (II), Ganymede (III), Callisto (IV), Themisto (XVIII), Leda (XIII), Himalia (Hestia or VI), Lysithea (Demeter or X), Elara (Hera or VII), S/2000 J11, Carpo (XLVI), S/2003 J3, S/2003 J12, Euporie (XXXIV), S/2011 J1, S/2010 J2, S/2003 J18, S/2016 J1, Orthosie -

Uranus System: 27 Satellites, Rings
Uranus System: 27 Satellites, Rings 1 27 Uranian Satellites Distance Radius Mass Satellite (000 km) (km) (kg) Discoverer Date --------- -------- ------ ------- ---------- ----- Cordelia 50 13 ? Voyager 2 1986 Ophelia 54 16 ? Voyager 2 1986 Bianca 59 22 ? Voyager 2 1986 Cressida 62 33 ? Voyager 2 1986 Desdemona 63 29 ? Voyager 2 1986 Juliet 64 42 ? Voyager 2 1986 Portia 66 55 ? Voyager 2 1986 Rosalind 70 27 ? Voyager 2 1986 Cupid (2003U2) 75 6 ? Showalter 2003 Belinda 75 34 ? Voyager 2 1986 Perdita 76 40 ? Voyager 2 1986 Puck 86 77 ? Voyager 2 1985 Mab (2003U1) 98 8 ? Showalter 2003 Miranda 130 236 6.30e19 Kuiper 1948 Ariel 191 579 1.27e21 Lassell 1851 Umbriel 266 585 1.27e21 Lassell 1851 Titania 436 789 3.49e21 Herschel 1787 Oberon 583 761 3.03e21 Herschel 1787 Francisco 4281 6 ? Holman 2003 Caliban 7169 40 ? Gladman 1997 Stephano 7948 15 ? Gladman 1999 Trinculo 8578 5 ? Holman 2001 Sycorax 12213 80 ? Nicholson 1997 Margaret 14689 6 ? Sheppard 2003 Prospero 16568 20 ? Holman 1999 Setebos 17681 20 ? Kavelaars 1999 Ferdinand 21000 6 ? Sheppard 2003 2 Uranian Satellites Oberon Titania Umbriel Miranda Ariel Puck 3 Uranian and Saturnian Satellites Distance Radius Mass Satellite (000 km) (km) (kg) Discoverer Date Epimetheus 151 57 5.60e17 Walker 1980 Puck 86 77 ? Voyager 2 1985 Janus 151 89 2.01e18 Dollfus 1966 Phoebe 12952 110 4.00e18 Pickering 1898 Hyperion 1481 143 1.77e19 Bond 1848 Mimas 186 196 3.80e19 Herschel 1789 Miranda 130 236 6.30e19 Kuiper 1948 Enceladus 238 260 8.40e19 Herschel 1789 Tethys 295 530 7.55e20 Cassini 1684 Dione 377 560 1.05e21 Cassini 1684 Ariel 191 579 1.27e21 Lassell 1851 Umbriel 266 585 1.27e21 Lassell 1851 Iapetus 3561 730 1.88e21 Cassini 1671 Oberon 583 761 3.03e21 Herschel 1787 Rhea 527 765 2.49e21 Cassini 1672 Titania 436 789 3.49e21 Herschel 1787 Titan 1222 2575 1.35e23 Huygens 1655 4 Uranian Satellites Distance Radius Mass Density Inc.