BIOMECHANICAL CONTROL MECHANISMS and MORPHOLOGICAL ADAPTATIONS for LOCOMOTION in CHALLENGING SCENARIOS a Dissertation Submitte
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Present Status of Fish Biodiversity and Abundance in Shiba River, Bangladesh
Univ. J. zool. Rajshahi. Univ. Vol. 35, 2016, pp. 7-15 ISSN 1023-6104 http://journals.sfu.ca/bd/index.php/UJZRU © Rajshahi University Zoological Society Present status of fish biodiversity and abundance in Shiba river, Bangladesh D.A. Khanom, T Khatun, M.A.S. Jewel*, M.D. Hossain and M.M. Rahman Department of Fisheries, University of Rajshahi, Rajshahi 6205, Bangladesh Abstract: The study was conducted to investigate the abundance and present status of fish biodiversity in the Shiba river at Tanore Upazila of Rajshahi district, Bangladesh. The study was conducted from November, 2016 to February, 2017. A total of 30 species of fishes were recorded belonging to nine orders, 15 families and 26 genera. Cypriniformes and Siluriformes were the most diversified groups in terms of species. Among 30 species, nine species under the order Cypriniformes, nine species of Siluriformes, five species of Perciformes, two species of Channiformes, two species of Mastacembeliformes, one species of Beloniformes, one species of Clupeiformes, one species of Osteoglossiformes and one species of Decapoda, Crustacea were found. Machrobrachium lamarrei of the family Palaemonidae under Decapoda order was the most dominant species contributing 26.29% of the total catch. In the Shiba river only 6.65% threatened fish species were found, and among them 1.57% were endangered and 4.96% were vulnerable. The mean values of Shannon-Weaver diversity (H), Margalef’s richness (D) and Pielou’s (e) evenness were found as 1.86, 2.22 and 0.74, respectively. Relationship between Shannon-Weaver diversity index (H) and pollution indicates the river as light to moderate polluted. -

Reproductive Strategy of Deep-Sea and Antarctic Octopods of the Genera Graneledone, Adelieledone and Muusoctopus (Mollusca: Cephalopoda)
Vol. 18: 21–29, 2013 AQUATIC BIOLOGY Published online January 23 doi: 10.3354/ab00486 Aquat Biol Reproductive strategy of deep-sea and Antarctic octopods of the genera Graneledone, Adelieledone and Muusoctopus (Mollusca: Cephalopoda) Vladimir Laptikhovsky* Falkland Islands Government Fisheries Department, Stanley FIQQ 1ZZ, Falkland Islands ABSTRACT: Reproductive systems of spent brooding octopodid females of Muusoctopus longi- brachus akambei, Adelieledone polymorpha and Graneledone macrotyla (Eledoninae) were col- lected in Southwest Atlantic and Antarctic waters. Their study demonstrated that the size distribu- tion of post-ovulatory follicles (POF) is mostly unimodal, suggesting that they only lay 1 batch of eggs. These data, together with a reevaluation of the literature, revealed that deep-sea and polar benthic octopods are generally not multiple spawners. Females spawn a single egg mass simulta- neously or as a series of several consequent mini-batches separated by short periods of time, mak- ing it difficult to distinguish them by either size or condition of their POF. Analysis of the length−frequency distribution of POF is a useful tool to reconstruct the spawning history of brood- ing females of cold-water octopods. KEY WORDS: Octopus · Spawning · Post-ovulatory follicle · POF · Reproductive strategy · Deep sea · Antarctic Resale or republication not permitted without written consent of the publisher INTRODUCTION 2008). Growth of ovarian eggs is generally synchro- nous, although in maturing females the oocyte size Most benthic octopods brood a single egg mass, and distribution might be bimodal or polymodal (Kuehl the female dies as the eggs hatch. This egg mass 1988, Laptikhovsky 1999a, 2001, Önsoy & Salman (clutch) might be laid in one bout or in several consec- 2004, Bello 2006, Barratt et al. -

Jan Jansen, Dipl.-Biol
The spatial, temporal and structural distribution of Antarctic seafloor biodiversity by Jan Jansen, Dipl.-Biol. Under the supervision of Craig R. Johnson Nicole A. Hill Piers K. Dunstan and John McKinlay Submitted in partial fulfilment of the requirements for the degree of Doctor of Philosophy in Quantitative Antarctic Science Institute for Marine and Antarctic Studies (IMAS), University of Tasmania May 2019 In loving memory of my dad, whose passion for adventure, sport and all of nature’s life and diversity inspired so many kids, including me, whose positive and generous attitude touched so many people’s lives, and whose love for the ocean has carried over to me. The spatial, temporal and structural distribution of Antarctic seafloor biodiversity by Jan Jansen Abstract Biodiversity is nature’s most valuable resource. The Southern Ocean contains significant levels of marine biodiversity as a result of its isolated history and a combination of exceptional environmental conditions. However, little is known about the spatial and temporal distribution of biodiversity on the Antarctic continental shelf, hindering informed marine spatial planning, policy development underpinning regulation of human activity, and predicting the response of Antarctic marine ecosystems to environmental change. In this thesis, I provide detailed insight into the spatial and temporal distribution of Antarctic benthic macrofaunal and demersal fish biodiversity. Using data from the George V shelf region in East Antarctica, I address some of the main issues currently hindering understanding of the functioning of the Antarctic ecosystem and the distribution of biodiversity at the seafloor. The focus is on spatial biodiversity prediction with particular consideration given to previously unavailable environmental factors that are integral in determining where species are able to live, and the poor relationships often found between species distributions and other environmental factors. -
Copyright Warning & Restrictions
Copyright Warning & Restrictions The copyright law of the United States (Title 17, United States Code) governs the making of photocopies or other reproductions of copyrighted material. Under certain conditions specified in the law, libraries and archives are authorized to furnish a photocopy or other reproduction. One of these specified conditions is that the photocopy or reproduction is not to be “used for any purpose other than private study, scholarship, or research.” If a, user makes a request for, or later uses, a photocopy or reproduction for purposes in excess of “fair use” that user may be liable for copyright infringement, This institution reserves the right to refuse to accept a copying order if, in its judgment, fulfillment of the order would involve violation of copyright law. Please Note: The author retains the copyright while the New Jersey Institute of Technology reserves the right to distribute this thesis or dissertation Printing note: If you do not wish to print this page, then select “Pages from: first page # to: last page #” on the print dialog screen The Van Houten library has removed some of the personal information and all signatures from the approval page and biographical sketches of theses and dissertations in order to protect the identity of NJIT graduates and faculty. ABSTRACT THESE FISH WERE MADE FOR WALKING: MORPHOLOGY AND WALKING KINEMATICS IN BALITORID LOACHES by Callie Hendricks Crawford Terrestrial excursions have been observed in multiple lineages of marine and freshwater fishes. These ventures into the terrestrial environment may be used when fish are searching out new habitat during drought, escaping predation, laying eggs, or seeking food sources. -

Predator-Driven Macroevolution in Flyingfishes Inferred from Behavioural Studies 59
Predator-driven macroevolution in flyingfishes inferred from behavioural studies 59 Predator-driven macroevolution in flyingfishes inferred from behavioural studies: historical controversies and a hypothesis U. Kutschera Abstract Flyingfishes (Exocoetidae) are unique oceanic animals that use their tail and their large, wing-like pectoral fins to launch themselves out of the water and glide through the air. Independent observations document that flyingfishes use their gliding ability to escape from aquatic predators such as dolphins (marine mammals). The fossil record of flyingfishes is very poor. Nevertheless, the evolution of gliding among flyingfishes and their allies (Beloniformes) was analysed and reconstructed by the ethologist Konrad Lorenz (1903 – 1989) and other zoologists. In this article I review the comparative method in evolutionary biology, describe historical controversies concerning the biology and systematics of flyingfishes and present a hypothesis on the phylogenetic development of gliding among these marine vertebrates. This integrative model is based on behavioural studies and has been corroborated by molecular data (evolutionary trees derived from DNA sequences). Introduction Since the publication of Darwin´s classical book (1872, 1st ed. 1859), evolutionary biology has relied primarily upon comparative studies of extant organisms (animals, plants), supplemented whenever possible by information obtained from the fossil record. This interaction between neontological and palaeontological research has greatly enriched our knowledge of the evolutionary history (phylogeny) of a variety of macro- organisms, notably hard-shelled marine invertebrates (molluscs etc.) and vertebrates, for which thousands of well-preserved fossils have been described. Such comparative studies have become considerably more significant with the development of molecular methods for reconstructing DNA-sequence-based phylogenies and with the increased rigour with which the comparative method has been applied. -

Mitochondrial DNA, Morphology, and the Phylogenetic Relationships of Antarctic Icefishes
MOLECULAR PHYLOGENETICS AND EVOLUTION Molecular Phylogenetics and Evolution 28 (2003) 87–98 www.elsevier.com/locate/ympev Mitochondrial DNA, morphology, and the phylogenetic relationships of Antarctic icefishes (Notothenioidei: Channichthyidae) Thomas J. Near,a,* James J. Pesavento,b and Chi-Hing C. Chengb a Center for Population Biology, One Shields Avenue, University of California, Davis, CA 95616, USA b Department of Animal Biology, 515 Morrill Hall, University of Illinois, Urbana, IL 61801, USA Received 10 July 2002; revised 4 November 2002 Abstract The Channichthyidae is a lineage of 16 species in the Notothenioidei, a clade of fishes that dominate Antarctic near-shore marine ecosystems with respect to both diversity and biomass. Among four published studies investigating channichthyid phylogeny, no two have produced the same tree topology, and no published study has investigated the degree of phylogenetic incongruence be- tween existing molecular and morphological datasets. In this investigation we present an analysis of channichthyid phylogeny using complete gene sequences from two mitochondrial genes (ND2 and 16S) sampled from all recognized species in the clade. In addition, we have scored all 58 unique morphological characters used in three previous analyses of channichthyid phylogenetic relationships. Data partitions were analyzed separately to assess the amount of phylogenetic resolution provided by each dataset, and phylogenetic incongruence among data partitions was investigated using incongruence length difference (ILD) tests. We utilized a parsimony- based version of the Shimodaira–Hasegawa test to determine if alternative tree topologies are significantly different from trees resulting from maximum parsimony analysis of the combined partition dataset. Our results demonstrate that the greatest phylo- genetic resolution is achieved when all molecular and morphological data partitions are combined into a single maximum parsimony analysis. -

Of RV Upolarsternu in 1998 Edited by Wolf E. Arntz And
The Expedition ANTARKTIS W3(EASIZ 11) of RV uPolarsternuin 1998 Edited by Wolf E. Arntz and Julian Gutt with contributions of the participants Ber. Polarforsch. 301 (1999) ISSN 0176 - 5027 Contents 1 Page INTRODUCTION........................................................................................................... 1 Objectives of the Cruise ................................................................................................l Summary Review of Results .........................................................................................2 Itinerary .....................................................................................................................10 Meteorological Conditions .........................................................................................12 RESULTS ...................................................................................................................15 Benthic Resilience: Effect of Iceberg Scouring On Benthos and Fish .........................15 Study On Benthic Resilience of the Macro- and Megabenthos by Imaging Methods .............................................................................................17 Effects of Iceberg Scouring On the Fish Community and the Role of Trematomus spp as Predator on the Benthic Community in Early Successional Stages ...............22 Effect of Iceberg Scouring on the Infauna and other Macrobenthos ..........................26 Begin of a Long-Term Experiment of Benthic Colonisation and Succession On the High Antarctic -

Walking Fish by Gyan, Yr 7 Mentor‐ Miss Firth
Walking fish By Gyan, Yr 7 Mentor‐ Miss Firth What fish can walk/live out of the water and which one is the best walking fish overall? Introduction: A Walking fish is a fish that can walk on land, using its special abilities. It’s a very evolved fish. They make/ find their homes on land and live there until they need to go back in the water for oxygen again. I will now show you four types of Walking fish and some facts about each one. I will then say which one I think is the best Walking fish out of the four. Mudskippers – (Oxudercinae) A mudskipper is a fish with two big eyes on both sides of its head. A mudskipper is a type of walking fish which can walk on land. In fact, the mudskipper can survive up to a large number of days on land; in fact they spend most of their time on land. Although it would then need to look, with its two bulging eyes, out for its predators: the monitor lizard, crocodiles and many more creatures, who love to snack on mudskippers. As you would be able to tell from the mudskippers’ name, the mudskippers live on/in mud and they also eat their mud for food, although, if another mudskipper comes onto the other mudskipper’s mud it will show a sign that it will fight with the other mudskipper if it comes too close to their mud by raising its fin but if the other mudskipper doesn’t listen to the mudskipper, they will definitely fight over their space of mud. -

Pelvic Fin Flexibility in Tree Climbing Fish
G Model ZOOL-25524; No. of Pages 7 ARTICLE IN PRESS Zoology xxx (2016) xxx–xxx Contents lists available at ScienceDirect Zoology journal homepage: www.elsevier.com/locate/zool The significance of pelvic fin flexibility for tree climbing fish a b a,b c Adhityo Wicaksono , Saifullah Hidayat , Yudithia Damayanti , Desmond Soo Mun Jin , a b,∗ a,∗ Erly Sintya , Bambang Retnoaji , Parvez Alam a Laboratory of Paper Coating and Converting, Centre for Functional Materials, Abo Akademi University, Porthaninkatu 3, 20500 Turku, Finland b Laboratory of Animal Embryology, Faculty of Biology, Universitas Gadjah Mada, Yogyakarta, Indonesia c Rapid Gain Global Corporation, Singapore a r t i c l e i n f o a b s t r a c t Article history: In this article, we compare the characteristics of biomechanical attachment exhibited by two morpholog- Received 1 March 2016 ically different mudskipper species, Boleophthalmus boddarti (with fused pelvic fins) and Periophthalmus Received in revised form 14 April 2016 variabilis (with unfused pelvic fins). P. variabilis is a tree and rock climber while B. boddarti dwells in the Accepted 17 June 2016 muddy shallows and is unable to climb. Our aim in this article is to determine whether it is predominantly Available online xxx chemical or morphological properties of the pelvic fins from each species that may allow P. variabilis to climb trees whilst preventing B. boddarti from doing the same. To fulfil our objective we perform friction Keywords: and suction resistance tests, Fourier transform infrared spectroscopy of the mucosal secretions under Mudskipper the fins, direct geometrical measurements and finite element modelling. -

Developmental Plasticity and the Origin of Tetrapods
ARTICLE doi:10.1038/nature13708 Developmental plasticity and the origin of tetrapods Emily M. Standen1, Trina Y. Du2 & Hans C. E. Larsson2 The origin of tetrapods from their fish antecedents, approximately 400 million years ago, was coupled with the origin of terrestrial locomotion and the evolution of supporting limbs. Polypterus is a memberof the basal-most group of ray-finned fish (actinopterygians) and has many plesiomorphic morphologies that are comparable to elpistostegid fishes, which are stem tetrapods. Polypterus therefore serves as an extant analogue of stem tetrapods, allowing us to examine how devel- opmental plasticity affects the ‘terrestrialization’ of fish. We measured the developmental plasticity of anatomical and biomechanical responses in Polypterus reared on land. Here we show the remarkable correspondence between the envi- ronmentally induced phenotypes of terrestrialized Polypterus and the ancient anatomical changes in stem tetrapods, and we provide insight into stem tetrapod behavioural evolution. Our results raise the possibility that environmentally induced developmental plasticity facilitated the origin of the terrestrial traits that led to tetrapods. The evolution of terrestrial locomotion in vertebrates required the appear- a sister taxon to the derived groups of interest can be used to estimate the ance of new behaviours and supporting appendicular structures1–8.The ancestral plasticity12. skeletal changes included the origin of supporting limbs, the decoupling of In this study, we investigated developmental -
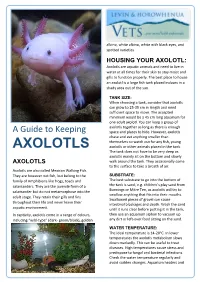
Axolotls Are Aquatic Animals and Need to Live in Water at All Times for Their Skin to Stay Moist and Gills to Function Properly
albino, white albino, white with black eyes, and spotted varieties. HOUSING YOUR AXOLOTL: Axolotls are aquatic animals and need to live in water at all times for their skin to stay moist and gills to function properly. The best place to house an axolotl is a large fish tank placed indoors in a shady area out of the sun. TANK SIZE: When choosing a tank, consider that axolotls can grow to 25-35 cm in length and need sufficient space to move. The accepted minimum would be a 45 cm long aquarium for one adult axolotl. You can keep a group of axolotls together as long as there is enough A Guide to Keeping space and places to hide. However, axolotls chase and eat anything smaller than themselves so watch out for any fish, young AXOLOTLS axolotls or other animals placed in the tank. The tank does not have to be very deep as axolotls mainly sit on the bottom and slowly AXOLOTLS walk around the tank. They occasionally come to the surface to take a breath of air. Axolotls are also called Mexican Walking Fish. They are however not fish, but belong to the SUBSTRATE: family of Amphibians like frogs, toads and The best substrate to go into the bottom of salamanders. They are the juvenile form of a the tank is sand, e.g. children’s play sand from Bunnings or Mitre Ten, as axolotls will try to salamander but do not metamorphose into the swallow anything that fits into their mouths. adult stage. They retain their gills and fins Swallowed pieces of gravel can cause throughout their life and never leave their intestinal blockages and death. -
Zur Polarforschung
Berichte zur Polarforschung IM i V? The Expedition ANTARKTIS VI1/4 (Epos leg 3) and VII/5 of RV “Polarstern” in 1989 Edited by Wolf Arntz, Wolfgang Ernst and Irmtraut Hempel with contributions of the participants ALFRED-WEGENER-INSTITUT FÜR POLAR- UND MEERESFORSCHUNG Alfred Wegener Institute for Polar and Marine Research D-2850 Bremerhaven Bundesrepublik Deutschland - Federal Republic of Germany mgggggm -— __ _____ _ „ . -7 3 - 3.4 Micronekton of the Weddell Sea: Distribution and abundance U. Piatkowski. M. White, W. Dimmler Objectives Recent studies on the Zooplankton and micronekton distribution in the Weddell Sea have revealed three distinct communities which are closely related to bathymetric and hydrographic conditions (BOYSEN-ENNEN & PIATKOWSKI, 1988 among others). Although these communities have been described pre- viously, their transition zones or boundary regions are not well known. A fine- scale transect or grid of sampling stations is necessary to reveal the changes in the community composition in these transition areas. Accordingly, in paral lel with the hydrographic, benthic and ichthyological research during EPOS leg 3 two transects at right-angles to the coast line, one off Halley Bay, the other off Kapp Norvegia, were selected to investigate the transition zone between shelf and oceanic micronekton communities in more detail. The pelagic communities are subject to diel changes in composition, structure and abundance. In an ideal sampling Programme, this variable would be eliminated by collecting samples at the same time each day or by sampling at regulär intervals throughout each 24 hour cycle. It was impractical to under- take this type of approach during of EPOS leg 3 but as means of identifying the magnitude of diel variations occurring within the pelagic community a time Station was undertaken near Kapp Norvegia.