A Simulator for the Topological Modeling Of
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

Toxicological Profile for Silica
SILICA 208 CHAPTER 5. POTENTIAL FOR HUMAN EXPOSURE 5.1 OVERVIEW Silica has been identified in at least 37 of the 1,854 hazardous waste sites that have been proposed for inclusion on the EPA National Priorities List (NPL) (ATSDR 2017). However, the number of sites in which silica has been evaluated is not known. The number of sites in each state is shown in Figure 5-1. Figure 5-1. Number of NPL Sites with Silica Contamination Crystalline Silica • c-Silica is ubiquitous and widespread in the environment, primarily in the form of quartz. Other predominant forms include cristobalite and tridymite. • Sand, gravel, and quartz crystal are the predominant commercial product categories for c-silica. • c-Silica enters environmental media naturally through the weathering of rocks and minerals and anthropogenic releases of c-silica in the form of air emissions (e.g., industrial quarrying and mining, metallurgic manufacturing, power plant emissions) or use in water filtration (quartz sand). SILICA 209 5. POTENTIAL FOR HUMAN EXPOSURE • c-Silica undergoes atmospheric transport as a fractional component of particulate emissions, is virtually insoluble in water and generally settles into sediment, and remains unchanged in soil. • c-Silica is present in air and water; therefore, the general population will be exposed to c-silica by inhalation of ambient air and ingestion of water. • Inhalation exposure is the most important route of exposure to c-silica compounds due to the development of adverse effects from inhaled c-silica in occupational settings. • Individuals with potentially high exposures include workers with occupational exposure to c-silica, which occurs during the mining and processing of metals, nonmetals, and coal, and in many other industries. -
Toxicological Profile for Silica Released for Public Comment in 2017
Toxicological Profile for Silica September 2019 SILICA ii DISCLAIMER Use of trade names is for identification only and does not imply endorsement by the Agency for Toxic Substances and Disease Registry, the Public Health Service, or the U.S. Department of Health and Human Services. SILICA iii FOREWORD This toxicological profile is prepared in accordance with guidelines* developed by the Agency for Toxic Substances and Disease Registry (ATSDR) and the Environmental Protection Agency (EPA). The original guidelines were published in the Federal Register on April 17, 1987. Each profile will be revised and republished as necessary. The ATSDR toxicological profile succinctly characterizes the toxicologic and adverse health effects information for these toxic substances described therein. Each peer-reviewed profile identifies and reviews the key literature that describes a substance's toxicologic properties. Other pertinent literature is also presented, but is described in less detail than the key studies. The profile is not intended to be an exhaustive document; however, more comprehensive sources of specialty information are referenced. The focus of the profiles is on health and toxicologic information; therefore, each toxicological profile begins with a relevance to public health discussion which would allow a public health professional to make a real-time determination of whether the presence of a particular substance in the environment poses a potential threat to human health. The adequacy of information to determine a substance's health -

OCCASION This Publication Has Been Made Available to the Public on The
OCCASION This publication has been made available to the public on the occasion of the 50th anniversary of the United Nations Industrial Development Organisation. DISCLAIMER This document has been produced without formal United Nations editing. The designations employed and the presentation of the material in this document do not imply the expression of any opinion whatsoever on the part of the Secretariat of the United Nations Industrial Development Organization (UNIDO) concerning the legal status of any country, territory, city or area or of its authorities, or concerning the delimitation of its frontiers or boundaries, or its economic system or degree of development. Designations such as “developed”, “industrialized” and “developing” are intended for statistical convenience and do not necessarily express a judgment about the stage reached by a particular country or area in the development process. Mention of firm names or commercial products does not constitute an endorsement by UNIDO. FAIR USE POLICY Any part of this publication may be quoted and referenced for educational and research purposes without additional permission from UNIDO. However, those who make use of quoting and referencing this publication are requested to follow the Fair Use Policy of giving due credit to UNIDO. CONTACT Please contact [email protected] for further information concerning UNIDO publications. For more information about UNIDO, please visit us at www.unido.org UNITED NATIONS INDUSTRIAL DEVELOPMENT ORGANIZATION Vienna International Centre, P.O. Box 300, 1400 Vienna, Austria Tel: (+43-1) 26026-0 · www.unido.org · [email protected] .25 1.4 г, 11 щ ■ ■ 5 I nirtr 1 ■ I I I LIMITEDLIMITED UNIDO-Czechoslovakia loint Programme JP/12/79 for International Co-operation in the Held of Ceramics. -

Radwaste Natural Analog Catalog. Pages III to 550
S5I c<P '-6~e +-`X, a-s9 F7O--CI. OAK RIDGE NATIONAL LABORATORY POST OFFICE BOX X LESTER OAK RIDGE, TENNESSEE 37831 OPERATED BY MARTIN MARIETTA ENERGY SYSTEMS, INC. 86 FEEB1 p4'34 February 12, 1986 Dr. D. J. Brooks Geotechnical Branch Office of Nuclear Material Safety and Safeguards U.S. Nuclear Regulatory Commission Room 623-SS Washington, D.C. 20555 Dear Dave: Please find enclosed the "Radwaste Natural Analog Catalog" by D. G. Brookins. Look over the catalog and call me to discuss any proposed follow-on work related to the catalog. Sincerely, Gary K. Jacobs Environmental Sciences Division GKJ/ Enclosure: "Radwaste Natural Analog Catalog," by D. G.Brookins cc w/o enclosure: Office of the Director, NMSS (Attn: Program Support Branch) Division Director, NMSS Division of Waste Management (2) M. R. Knapp, Chief, Geotechnical Branch, NMSS K. C. Jackson, Geotechnical Branch, NMSS D. G. Brookins, University of New Mexico G. F. Birchard, Division of Waste Management, RES A. P. Malinauskas GKJ File WDA t'pfect44i Docket No- tPDR i LnPD H a 860314029 B60212 PDR WPREM EXIORNL 0-0287 PDR at-79 Q -e O \-. Xon c 4 /;& T~OdD , o+ / alic'vralcS JOURNALS RESEARCHED OR UTILIZED: M PG Bulletin American Journal of Science American Mineralogy Bulletin Volcanologique Canadian Journal of Earth Sciences Canadian Mineralogist Chemical Geology Clay and Clay Minerals Clay Minerals Contributions to Mineralogy and Petrology Earth and Planetary Science Letters Earth Science Earth Science Bulletin Economic Geology Environmental Geology GSA Bulletin Geochemical Journal -
Tectosilicates – (Framework Silicates)
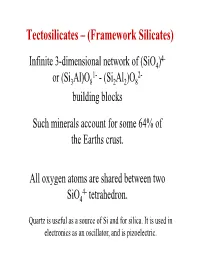
Tectosilicates – (Framework Silicates) 4- Infinite 3-dimensional network of (SiO4) 1- 2- or (Si3Al)O8 - (Si2Al2)O8 building blocks Such minerals account for some 64% of the Earths crust. All oxygen atoms are shared between two 4- SiO4 tetrahedron. Quartz is useful as a source of Si and for silica. It is used in electronics as an oscillator, and is pizoelectric. (SiO2) Infinite tetrahedral network SiO2 Group The SiO 2 stucture is electrically neutral – it does not require additional cation or anion species. SiO2 – quartiititz in its simpl est tf form. However, we discuss the “SiO2 group” because there arenineSiOare nine SiO2 polymorphs. Stishovite Tetragonal 4.35 g/cm3 CiCoesite MliiMonoclinic 3013.01 Low (α) Quartz Hexagonal (Trigonal) 2.65 High (β) Quartz Hexagonal (Trigonal) 2.53 Keatite Tetragonal 2.50 Low (α) Tridymite Mono. or Ortho. 2.26 High (β) Tridymite Hexagonal 2.22 Low (α) Cristobalite Tetragonal 2.32 High (β) Cristobalite Isometric 2.20 The stable polymorph is determined by energy considerations. Hig h T forms – greater latti ce energy, lower D and RI. High P forms – closer packing , higher symmetry, higher D and higher RI. Lower the T and P the lower the symmetry of the SiO2 ppyolymorp h. Quartz, tridymite and cristobalite are related via reconstructive inversions. Inversions between high and low are displacive. Quartz CitCristob blitalite Tridymite Coesite Optical Properties QtiQuartz is common ly whit hitte to colourless in hand speciman and colourless in thin section. Low relief and low 1st order birefringence – sometimes tinggyed yellow. Uniaxial (Trigonal) positive and length fast. Chemically very stable mineral, and with medium -high hardness (7) mechanically stable. -

Revision 1 Natural Occurrence of Keatite Precipitates in UHP
1 Revision 1 2 3 Natural occurrence of keatite precipitates in UHP clinopyroxene from 4 the Kokchetav Massif: A TEM investigation 5 6 Tina R. Hill, Hiromi Konishi, and Huifang Xu * 7 Department of Geoscience, University of Wisconsin-Madison, Madison, Wisconsin 53706, 8 U.S.A. 9 *Corresponding author 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 ABSTRACT 25 We report the first natural occurrence of keatite, also known as silica K, discovered as a 26 precipitate in the core of ultrahigh-pressure (UHP) clinopyroxene (CPX) within garnet 27 pyroxenite from the Kokchetav Massif, Kazakhstan. High-resolution transmission electron 28 microscopy and electron diffraction demonstrate that sub-micron and nano-scale keatite 29 precipitates have a definite crystallographic relationship with the host pyroxene (diopside = 30 ~Di89) CPX (100) ║keatite (100) and CPX (010) ║keatite (001). Clinopyroxene provides a 31 template for keatite nucleation due to the close structural relationship and excellent lattice match 32 between the diopside and keatite. We propose that keatite micro-precipitates are formed in 33 localized low pressure micro-environments produced as a result of exsolution of extra silica and 34 vacancies held within UHP host diopside and stabilized by the pyroxene lattice. Low density 35 metastable keatite and its relationship to the host pyroxene likely reflects the important influence 36 of pyroxene/precipitate interfacial energy on the micro- and nano-scales in controlling the nature 37 of exsolved phases in exhumed UHP minerals. 38 Keywords: HRTEM, ultrahigh-pressure (UHP), diopside, keatite, silica exsolution, epitaxial 39 growth 40 1. -

Toxicological Profile for Silica
SILICA 198 CHAPTER 4. CHEMICAL AND PHYSICAL INFORMATION 4.1 CHEMICAL IDENTITY The synonyms, trade names, chemical formulas, and identification numbers of silica and selected forms of silica are provided in Table 4-1. Table 4-1. Chemical Identity of Silica and Compoundsa Characteristic Information Chemical form Various crystalline and amorphous silica forms Chemical name Silica Synonym(s) Silicon dioxide; diatomaceous earth; diatomaceous silica; diatomite, precipitated amorphous silica; silica gel, silicon dioxide (amorphous); silica colloidalb,c Registered trade No data name(s) Chemical formula SiO2 Chemical structure Not applicable CAS Registry Number 7631-86-9 Chemical form Crystalline silica Chemical name Quartz Cristobalite Tridymite Synonym(s) α-Quartz; quartz; agate; Silica, crystalline- Silica, crystalline-tridymite; chalcedony; chert; flint; cristobalite; α-cristobalite; α-tridymite; β1-tridymite; jasper; novaculite; β-cristobalite β2-tridymite quartzite; sandstone; silica sand; tripoli Registered trade CSQZ; DQ 12; Min-U-Sil; No data No data name(s) Sil-Co-Sil; Snowit; Sykron F300; Sykron F600 Chemical formula SiO2 SiO2 SiO2 Chemical structure α-Quartz: trigonal crystal α-Cristobalite: tetragonal α-Tridymite: orthorhombic crystal crystal CAS Registry Number 14808-60-7 14464-46-1 15468-32-3 SILICA 199 4. CHEMICAL AND PHYSICAL INFORMATION Table 4-1. Chemical Identity of Silica and Compoundsa Characteristic Information Chemical form Natural amorphous silicad Chemical name Diatomaceous Diatomaceous Diatomaceous Vitreous silicae earth, -
Classic and Advanced Ceramics: from Fundamentals to Applications
Robert B. Heimann Classic and Advanced Ceramics From Fundamentals to Applications Robert B. Heimann Classic and Advanced Ceramics Related Titles Aldinger, F., Weberruss, V. A. Volume 4: Applications Advanced Ceramics and 2012 Future Materials Hardcover ISBN: 978-3-527-31158-3 An Introduction to Structures, Properties and Technologies Öchsner, A., Ahmed, W. (eds.) 2010 Hardcover Biomechanics of Hard Tissues ISBN: 978-3-527-32157-5 Modeling, Testing, and Materials 2010 Riedel, R., Chen, I-W. (eds.) Hardcover Ceramics Science and ISBN: 978-3-527-32431-6 Technology 4 Volume Set Krenkel, W. (ed.) Hardcover Ceramic Matrix Composites ISBN: 978-3-527-31149-1 Fiber Reinforced Ceramics and their Applications Volume 1: Structures 2008 Hardcover 2008 ISBN: 978-3-527-31361-7 Hardcover ISBN: 978-3-527-31155-2 Öchsner, A., Murch, G. E., de Lemos, M. J. S. (eds.) Volume 2: Properties Cellular and Porous Materials 2010 Hardcover Thermal Properties Simulation and Prediction ISBN: 978-3-527-31156-9 2008 Hardcover ISBN: 978-3-527-31938-1 Volume 3: Synthesis and Processing 2010 Hardcover ISBN: 978-3-527-31157-6 Robert B. Heimann Classic and Advanced Ceramics From Fundamentals to Applications The Author All books published by Wiley-VCH are carefully produced. Nevertheless, authors, editors, and Prof. Dr. Robert B. Heimann publisher do not warrant the information Am Stadtpark 2A contained in these books, including this book, to 02826 Görlitz be free of errors. Readers are advised to keep in mind that statements, data, illustrations, procedural details or other items may inadvertently be inaccurate. Library of Congress Card No.: applied for British Library Cataloguing-in-Publication Data A catalogue record for this book is available from the British Library. -
Classification, Mineralogy and Industrial Potential of Sio2 Minerals
Springer Geology For further volumes: http://www.springer.com/series/10172 Jens Götze • Robert Möckel Editors Quartz: Deposits, Mineralogy and Analytics 123 Editors Jens Götze Robert Möckel TU Bergakademie Freiberg TU Bergakademie Freiberg Institute of Mineralogy Institute of Mineralogy Brennhausgasse 14 Brennhausgasse 14 09596 Freiberg 09596 Freiberg Germany Germany ISBN 978-3-642-22160-6 ISBN 978-3-642-22161-3 (electronic) DOI 10.1007/978-3-642-22161-3 Springer Heidelberg New York Dordrecht London Library of Congress Control Number: 2012933435 Ó Springer-Verlag Berlin Heidelberg 2012 This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of the material is concerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation, broadcasting, reproduction on microfilms or in any other physical way, and transmission or information storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology now known or hereafter developed. Exempted from this legal reservation are brief excerpts in connection with reviews or scholarly analysis or material supplied specifically for the purpose of being entered and executed on a computer system, for exclusive use by the purchaser of the work. Duplication of this publication or parts thereof is permitted only under the provisions of the Copyright Law of the Publisher’s location, in its current version, and permission for use must always be obtained from Springer. Permissions for use may be obtained through RightsLink at the Copyright Clearance Center. Violations are liable to prosecution under the respective Copyright Law. The use of general descriptive names, registered names, trademarks, service marks, etc. -
STABILIZATION of Β-CRISTOBALITE in the Sio2-Alpo4-BPO4 SYSTEM
STABILIZATION OF β-CRISTOBALITE IN THE SiO2-AlPO4-BPO4 SYSTEM A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Material Science and Engineering By Kathryn Doyle B.S.M.S.E., Wright State University 2018 2020 Wright State University WRIGHT STATE UNIVERSITY GRADUATE SCHOOL December 4, 2020 I HEREBY RECOMMEND THAT THE THESIS PREPARED UNDER MY SUPERVISION BY Kathryn Doyle ENTITLED Stabilization of β-Cristobalite in the SiO2-AlPO4-BPO4 System BE ACCEPTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF Master of Science in Materials Science and Engineering. __________________________ H. Daniel Young, Ph.D. Thesis Director __________________________ Raghavan Srinivasan, Ph.D. P.E. Chair, Department of Mechanical and Materials Engineering Committee on Final Examination: ________________________________ H. Daniel Young, Ph.D. ________________________________ Raghavan Srinivasan, Ph.D. P.E. ________________________________ Maher Amer, Ph.D. ________________________________ Barry Milligan, Ph.D. Interim Dean of the Graduate School ABSTRACT Doyle, Kathryn. M.S.M.S.E Department of Mechanical and Material Science Engineering, Wright State University, 2020. Stabilization of β-Cristobalite in the SiO2-AlPO4-BPO4 System. Fused silica (silica glass) is transparent in the optical and near-infrared and has a low dielectric constant, making it suitable as a window material for radio frequency radiation. However, at high temperatures (>1100C), fused silica will easily creep and lose dimensional stability. Crystallized silica is much more creep resistant than fused silica. Silica crystallizes to many different structures including quartz, tridymite, and α- and β cristobalite. The only cubic polymorph, which is suitable for both optical and radio frequency transmission in polycrystalline form, is β -cristobalite. -

Bonded Interactions and the Crystal Chemistry of Minerals: a Review # Z
This article is protected by German copyright law. You may copy and distribute this article for this article and distribute copy You may law. copyright German by protected is This article Z. Kristallogr. 223 (2008) 1–40 / DOI 10.1524/zkri.2008.0002 1 # by Oldenbourg Wissenschaftsverlag, Mu¨nchen Bonded interactions and the crystal chemistry of minerals: a review G. V. Gibbs*,I, Robert T. DownsII, David F. CoxIII, Nancy L. RossI, Charles T. PrewittII, Kevin M. RossoIV, Thomas LippmannV and Armin KirfelVI I Department of Geosciences, Virginia Tech, Blacksburg, VA 24061, USA II Department of Geosciences, University of Arizona, Tucson, AZ, 85721, USA III Department of Chemical Engineering, Virginia Tech, Blacksburg, Va. 24061, USA IV Chemical Science Division, and W.R. Wiley Molecular Sciences Laboratory, Pacific Northwest Laboratory, Richland, Washington, USA V GKSS, Max-Planck-Strasse, 21502, Geesthacht, Germany VI Mineralogisch Petrologisches Institut, Universitact Bonn, Poppelsdorfer Schloss, 53115, Bonn, Germany Received May 7, 2007; accepted August 15, 2007 Bond critical point / Silicates / Sulfides / character of the intermediate and shared bonded interac- Local energy densities / Eelectron density / Bond strength / tions. In contrast, the local kinetic energy density in- Electron lone pair domains / Molecular chemistry / creases with decreasing bond length for closed shell inter- Electrophilicity actions with G(rc) dominating V(rc) in the internuclear region, typical of an ionic bond. Abstract. Connections established during last century Notwithstanding its origin in Pauling’s electrostatic between bond length, radii, bond strength, bond valence bond strength rule, the Brown-Shannon bond valence for and crystal and molecular chemistry are briefly reviewed Si––O bonded interactions agrees with the value of the followed by a survey of the physical properties of the electron density, r(rc), on a one-to-one basis, indicating your personal use only. -

Silica Dust, Crystalline, in the Form of Quartz Or Cristobalite
SILICA DUST, CRYSTALLINE, IN THE FORM OF QUARTZ OR CRISTOBALITE Silica was considered by previous IARC Working Groups in 1986, 1987, and 1996 (IARC, 1987a, b, 1997). Since that time, new data have become available, these have been incorporated in the Monograph, and taken into consideration in the present evaluation. 1. Exposure Data 1.2 Chemical and physical properties of the agent Silica, or silicon dioxide (SiO2), is a group IV metal oxide, which naturally occurs in both Selected chemical and physical properties crystalline and amorphous forms (i.e. polymor- of silica and certain crystalline polymorphs are phic; NTP, 2005). The various forms of crystal- summarized in Table 1.1. For a detailed discus- line silica are: α-quartz, β-quartz, α-tridymite, sion of the crystalline structure and morphology β-tridymite, α-cristobalite, β-cristobalite, keatite, of silica particulates, and corresponding phys- coesite, stishovite, and moganite (NIOSH, 2002). ical properties and domains of thermodynamic The most abundant form of silica is α-quartz, stability, refer to the previous IARC Monograph and the term quartz is often used in place of the (IARC, 1997). general term crystalline silica (NIOSH, 2002). 1.3 Use of the agent 1.1 Identification of the agent The physical and chemical properties of α-Quartz is the thermodynamically stable silica make it suitable for many uses. Most silica form of crystalline silica in ambient conditions. in commercial use is obtained from naturally The overwhelming majority of natural crystal- occurring sources, and is categorized by end-use line silica exists as α-quartz. The other forms or industry (IARC, 1997; NTP, 2005).