Foot Force Models of Crowd Dynamics on a Wobbly Bridge∗
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

Dynamic Manipulation of Mechanical Resonators in the High Amplitude Regime Through Optical Backaction
Dynamic manipulation of mechanical resonators in the high amplitude regime through optical backaction Mahmood Bagheri, Menno Poot, Mo Li, Wolfram P. H. Pernice, Hong X. Tang Department of Electrical Engineering, Yale University, New Haven, CT 06511 Cavity optomechanics enables active manipulation of mechanical resonators through backaction cooling and amplification1,2. This ability to control mechanical motion with retarded optical forces has recently spurred a race towards realizing a mechanical resonator in its quantum ground state3,4,5,6,7,8,9. Here, instead of quenching optomechanical motion, we demonstrate high amplitude operation of nanomechanical resonators by utilizing a highly efficient phonon generation process. In this regime, the nanomechanical resonators gain sufficient energy from the optical field to overcome the large energy barrier of a double well potential, leading to nanomechanical slow-down and zero frequency singularity, as predicted by early theories10. Besides fundamental studies and interests in parametric amplification of small forces11, optomechanical backaction is also projected to open new windows for studying discrete mechanical states12,13 and to foster applications14,15,16,17. Here we realize a non-volatile mechanical memory element, in which bits are written and reset via optomechanical backaction by controlling the mechanical damping across the barrier. Our study casts a new perspective on the energy dynamics in coupled mechanical resonator – cavity systems and enables novel functional devices that utilize the principles of cavity optomechanics. Classical and quantum dynamics of nanomechanical systems promise new applications in nanotechnology18,19 and fundamental tests of quantum mechanics in mesoscopic objects2,9. Recent development of nanoscale electromechanical (NEMS) and optomechanical systems has enabled cooling of mechanical systems to their quantum ground state7,8, which brings the possibility of quantum information processing with mechanical devices20,21. -

Remote Sensing for Post Disaster Management of Freight Transportation Networks
Final Report Remote Sensing for Post Disaster Management of Freight Transportation Networks Shahram Pezeshk, Ph.D., P.E Gregory Taff, Ph.D. Charles V. Camp, Ph.D. and Mathew J. Bolton, Graduate Student ABSTRACT • ii ABSTRACT • ii ABSTRACT In the event of a natural disaster, assessing the status of our transportation network and repairing it is of critical importance to recovery efforts. We must also consider terrorist attacks worldwide in terms of infrastructure integrity assessment and recovery. Major roadways, if damaged at key locations, can be rendered useless for commercial traffic and more importantly, for emergency response and law enforcement vehicles. The delay or inability to answer emergency calls can lead to the loss of numer- ous lives. With the use of several geographic techniques and tools, these dangers can be minimized. This report documents the test of developing a method of research utilizing remote sensing tech- niques to detect damage to road bridges. Through using derived pixel data and algorithms, pre- and post- earthquake images are compared to identify difference in the pixels’ brightness values (BV’s). With these techniques we can develop an expedient assessment of the transportation infrastructure’s integrity throughout Shelby County, Tennessee if it were to play host to one of these disastrous evens. These techniques could be implemented throughout the rest of the world. This research develops methodology for damage detection for a possible future event. Our goal was to test these methods of bridges change detection on an area for which we have data on the integrity of multiple bridges (damaged or not), and high spatial resolution imagery of both before and after an earthquake. -
Tuning the Resonant Frequency and Damping of an Electromagnetic Energy Harvester Using Power Electronics Paul D
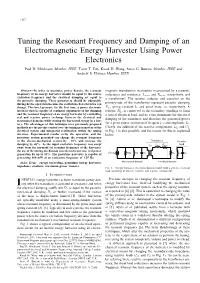
Tuning the Resonant Frequency and Damping of an Electromagnetic Energy Harvester Using Power Electronics Paul D. Mitcheson Member, IEEE, Tzern T. Toh, Kwok H. Wong, Steve G. Burrow Member, IEEE and Andrew S. Holmes Member, IEEE Abstract—In order to maximize power density, the resonant magnetic transduction mechanism (represented by a parasitic frequency of an energy harvester should be equal to the source inductance and resistance, Larm and Rarm, respectively, and excitation frequency and the electrical damping set equal to a transformer). The resistor, inductor and capacitor on the the parasitic damping. These parameters should be adjustable during device operation because the excitation characteristics can primary-side of the transformer represent parasitic damping change. This brief presents, for the first time, a power electronic Dp, spring constant k, and proof mass, m, respectively. A interface that is capable of continual adjustment of the damping resistor, RL, is connected to the secondary windings to form and the resonant frequency of an energy harvester by controlling a typical electrical load, and its value determines the electrical real and reactive power exchange between the electrical and damping of the transducer and therefore the generated power mechanical domains while storing the harvested energy in a bat- tery. The advantages of this technique over previously proposed for a given source excitation of frequency ω and amplitude Y0. methods are the precise control over the tuning parameters of the Clearly, the addition of the reactive components, LL and CL electrical system and integrated rectification within the tuning in Fig. 1 is also possible, and the reason for this is explained interface. -

The Role of Mechanical Resonance in Physiological Tremor
THE ROLE OF MECHANICAL RESONANCE IN PHYSIOLOGICAL TREMOR by CARLIJN ANDREA VERNOOIJ A thesis submitted to The University of Birmingham for the degree of DOCTOR OF PHILOSOPHY School of Sport, Exercise & Rehabilitation Sciences College of Life and Environmental Sciences University of Birmingham December 2013 University of Birmingham Research Archive e-theses repository This unpublished thesis/dissertation is copyright of the author and/or third parties. The intellectual property rights of the author or third parties in respect of this work are as defined by The Copyright Designs and Patents Act 1988 or as modified by any successor legislation. Any use made of information contained in this thesis/dissertation must be in accordance with that legislation and must be properly acknowledged. Further distribution or reproduction in any format is prohibited without the permission of the copyright holder. ABSTRACT The origin of physiological tremor has been studied for many years. Several central and spinal mechanisms which provide an oscillatory input to the muscles have been proposed. Nevertheless, any neural control signal inevitably has to work upon a resonant peripheral system involving the series-coupled elastic muscle-tendon complex and the inertia of the limb. In this thesis I look into the potential role for mechanical resonance to explain tremor. First, I show that the resonant component of hand tremor depends on the velocity of hand movement. Movement reduces muscle stiffness (a process called muscle thixotropy) and the tremor frequency falls. Second, I demonstrate that rhythmic tremor is abolished when eliminating resonance by recording tremor in isometric conditions. Third, I replaced EMG by an artificial drive. -

Strength Versus Weight Contradictions in Bridge Design
Strength versus Weight Contradictions In Bridge Design Darrell Mann Systematic Innovation 5A Yeo-Bank Business Park Kenn Road, Clevedon BS21 6UW, UK Phone: +44 (1275) 337500 Fax: +44 (1275) 337509 E-mail: [email protected] INTRODUCTION Most if not all engineering systems experience a strength versus weight conflict of some description. The contradiction most commonly manifests itself in the balance designers attempt to strike between the need to ensure adequate strength, and the parallel desire to utilise the minimum amount of material, and thus achieve the lowest cost. The strength/weight conflict plays a particularly important role in the design of bridges. In order to remain competitive in the bridge engineering sector, designers are forced into a perpetual drive to achieve bridge designs which use less materials than their predecessors. Historical evidence firmly suggests that, using traditional design approaches, this quest for ever better strength/weight ratios – coupled with other factors - inevitably leads to some kind of catastrophic failure:- Bridge Probable Failure Year Interval Type Mechanism Dee Trussed Girder Torsional Instability 1847 - Tay Truss Unstable in wind 1879 32 Quebec Cantilever Compressive buckling 1907 28 Tacoma Narrows Suspension Aerodynamic instability 1940 33 Milford Haven Box Girder Plate Buckling 1970 30 ? Cable-Stayed ? Instability ? c2000 c30 Source: Sibley & Walker, ‘Structural Accidents and Their Causes’, I CivE, 1977 Table 1: Landmark Bridge Failures TRIZ offers much to both help understand the mechanisms underlying the bridge failure trend, and – more importantly – offers tools to help designers continue to innovate new design solutions which improve strength/weight ratios without compromising the structural integrity of the bridge. -

In April 1831, a Brigade of Soldiers Marched in Step Across England's Broughton Suspension Bridge
In April 1831, a brigade of soldiers marched in step across England's Broughton Suspension Bridge. According to accounts of the time, the bridge broke apart beneath the soldiers, throwing dozens of men into the water. After this happened, the British Army reportedly sent new orders: Soldiers crossing a long bridge must "break stride," or not march in unison, to stop such a situation from occurring again. Structures like bridges and buildings, although they appear to be solid and immovable, have a natural frequency of vibration within them. A force that's applied to an object at the same frequency as the object's natural frequency will amplify the vibration of the object in an occurrence called mechanical resonance. Sometimes your car shakes hard when you hit a certain speed, and a girl on a swing can go higher with little effort just by swinging her legs. The same principle of mechanical resonance that makes these incidents happen also works when people walk in lockstep across a bridge. If soldiers march in unison across the structure, they apply a force at the frequency of their step. If their frequency is closely matched to the bridge's frequency, the soldiers' rhythmic marching will amplify the vibrational frequency of the bridge. If the mechanical resonance is strong enough, the bridge can vibrate until it collapses from the movement. A potent reminder of this was seen in June 2000, when London's Millennium Bridge opened to great fanfare. As crowds packed the bridge, their footfalls made the bridge vibrate slightly. "Many pedestrians fell spontaneously into step with the bridge's vibrations, inadvertently amplifying them," according to a 2005 report in Nature. -

Mechanical Stabilisation of Superconducting Quarter Wave Resonators A
MECHANICAL STABILISATION OF SUPERCONDUCTING QUARTER WAVE RESONATORS A. Facco, INFN- Laboratori Nazionali di Legnaro, via Romea 4, 35020 Legnaro (Padova) Italy; V. Zviagintsev, ITEP, B. Cheremushkinskaya 25, Moscow,117259, Russia. Abstract in the case of white noise; on the other hand, when a 42 Hz mechanical vibration is applied for a long enough A device which is capable to reduce significantly the time, the frequency error can reach such an amplitude amplitude of mechanical vibrations in superconducting that the phase-lock system capabilities are exceeded. In quarter wave resonators was designed, constructed and the ALPI linac cryostats this condition can appear, for a tested. This device can eliminate the necessity of fast few minutes, almost everyday; this could make the tuners and related electronics in many superconducting operation of many resonators at the same time cavities, resulting in a significant cost saving both in the problematic. We have exploited a new approach to this construction and in the operation of superconducting low problem: we have added to the resonator a mechanical beta linacs. dissipator, capable to absorb energy from the dangerous mechanical mode and, consequently, to reduce its 1 INTRODUCTION amplitude. One problem in this approach is the difficulty Mechanical stability is a very important requirement in of building a device with a linear, or at least smooth, superconducting cavities; their very small rf bandwidth, a response at liquid helium temperature; another problem is consequence of their very high quality factor, makes very that new resonant modes could be easily introduced by difficult to lock them to an external frequency, requiring adding to the resonator new parts. -

Tuning of a Vibration Absorber with Shunted Piezoelectric Transducers
Arch Appl Mech (2016) 86:1715–1732 DOI 10.1007/s00419-014-0972-5 SPECIAL Oliver Heuss · Rogério Salloum · Dirk Mayer · Tobias Melz Tuning of a vibration absorber with shunted piezoelectric transducers Received: 16 December 2013 / Accepted: 19 November 2014 / Published online: 13 December 2014 © The Author(s) 2014. This article is published with open access at Springerlink.com Abstract In order to reduce structural vibrations in narrow frequency bands, tuned mass absorbers can be an appropriate measure. A quite similar approach which makes use of applied piezoelectric elements, instead of additional oscillating masses, are the well-known resonant shunts, consisting of resistances, inductances, and possibly negative capacitances connected to the piezoelectric element. This paper presents a combined approach, which is based on a conventional tuned mass absorber, but whose characteristics can be strongly influenced by applying shunted piezoceramics. Simulations and experimental analyses are shown to be very effective in predicting the behavior of such electromechanical systems. The vibration level of the absorber can be strongly attenuated by applying different combinations of resistant, resonant, and negative capacitance shunt circuits. The damping characteristics of the absorber can be changed by applying a purely resistive or resonant resistant shunt. Additionally, the tuning frequency of the absorber can be adapted to the excitation frequency, using a negative capacitance shunt circuit, which requires only the energy to supply the electric components. Keywords Shunt damping · Tuned mass absorber · Active vibration control · Semi-active · Frequency tuning 1 Introduction Tuned vibration absorbers [1] are common means of vibration reduction in many technical applications. Basically, those devices are single degree of freedom oscillators comprising of a spring-damper element and of an inertial mass. -

Frequency Tuning of Vibration Absorber Using Topology
FREQUENCY TUNING OF VIBRATION ABSORBER USING TOPOLOGY OPTIMIZATION by SWAPNIL SUBHASH HAREL Presented to the Faculty of the Graduate School of The University of Texas at Arlington in Partial Fulfillment of the Requirements for the Degree of MASTER OF SCIENCE IN MECHANICAL ENGINEERING THE UNIVERSITY OF TEXAS AT ARLINGTON Copyright © by Swapnil Subhash Harel 2017 All Rights Reserved 2 Acknowledgements I would like to express my gratitude towards Dr. Robert Taylor for guiding and helping me throughout my thesis research. He always had time to discuss my work and helped solve any problem that I faced during my research work. I would like to thank Dr. Bo Wang for constantly supporting my research work with his ideas which were second to none. I would also like to thank Dr, Kent Lawrence for finding time out of their busy schedule to serve on my thesis defense committee. Lastly, I would like to thank my family. I would especially like to support my father, Subhash Harel, my mother Surekha Harel and my younger sister Apurva Harel for their support all these years. It was their continued support and belief that I have been able to do all that I have done so far. I would also like to offer regards to all those who have supported or helped me in any regards this period. May 04, 2017 3 Abstract FREQUENCY TUNING OF VIBRATION ABSORBER USING TOPOLOGY OPTIMIZATION by Swapnil Subhash Harel, MS The University of Texas at Arlington, 2017 Supervising Professors: Dr. Robert Taylor and Dr. Bo Wang A tuned mass absorber is a system for reducing the amplitude in one oscillator by coupling it to a second oscillator. -

Education in a Pandemic: the Disparate Impacts of COVID-19 on America's Students (PDF)
Education in a Pandemic: The Disparate Impacts of COVID-19 on America’s Students OFFICE FOR CIVIL RIGHTS Message from the Acting Assistant Secretary In his Executive Order on Supporting the Reopening and Continuing Operation of Schools and Early Childhood Education Providers, President Biden expressed our nation’s commitment to students across the country: “Every student in America deserves a high-quality education in a safe environment.”1 Over the course of the COVID-19 pandemic, so many students have found new ways to continue learning in this challenging time and countless teachers, staff, faculty, administrators, and institutional leaders, along with students’ families, have gone above and beyond to support our students at all educational levels. Yet, this promise of a safe, high-quality education was already out of reach for many students long before the COVID-19 pandemic and could slip further away if we do not act collectively and with attention to equal opportunity for all students. Against this backdrop, this Report responds to President Biden’s Executive Order, and, specifically, to this call to the Assistant Secretary for Civil Rights in the Department of Education: [T]o deliver a report as soon as practicable on the disparate impacts of COVID-19 on students in elementary, secondary, and higher education, including those attending historically black colleges and universities, and Tribal colleges and universities, Hispanic- serving institutions, and other minority-serving institutions.2 The Department’s Office for Civil Rights -
Modulation of Mechanical Resonance by Chemical Potential Oscillation in Graphene
LETTERS PUBLISHED ONLINE: 7 DECEMBER 2015 | DOI: 10.1038/NPHYS3576 Modulation of mechanical resonance by chemical potential oscillation in graphene Changyao Chen1†, Vikram V. Deshpande2, Mikito Koshino3, Sunwoo Lee4, Alexander Gondarenko1, Allan H. MacDonald5, Philip Kim6 and James Hone1* The classical picture of the force on a capacitor assumes a investigated. Understanding the corrections to the classical model large density of electronic states, such that the electrochemical is of fundamental interest and important for modelling of nano- potential of charges added to the capacitor is given by mechanical systems in the atomically thin limit3,4. Here we examine the external electrostatic potential and the capacitance is the case of a resonant nano-mechanical device, and show that the determined purely by geometry1. Here we consider capacitively first-order correction to the resonant frequency consists of three driven motion of a nano-mechanical resonator with a low terms: one term proportional to µ and the other two proportional density of states, in which these assumptions can break to its derivative dµ/dn, with the latter represented through the in- 2–5 −1 D. = 2/. µ/ down . We find three leading-order corrections to the verse quantum capacitance CQ 1 Ae d dn)(A is the sample classical picture: the first of which is a modulation in the size and e is the electron charge). The phenomenon is explored static force due to variation in the internal chemical potential; experimentally by examining the behaviour of a graphene resonator, the second and third are changes in the static force and in which µ is tuned by a perpendicular magnetic field B at a dynamic spring constant due to the rate of change of chemical fixed electrochemical potential. -

Chapter 3 Theory of Phase Noise Mechanism of NEMS
Chapter 3 Theory of Phase Noise Mechanism of NEMS We present the theory of phase noise mechanism of NEMS. We examine both fundamental and nonfundamental noise processes to obtain expressons for phase noise density, Allan deviation, and mass sensitivity. Fundamental noise processes considered here include thermomechanical noise, momentum exchange noise, adsorption-desorption noise, diffusion noise, and temperature fluctuation noise. For nonfundamental noise processes, we develop a formalism to consider the Nyquist- Johnson noise from transducer amplifier implementations. The detailed analysis here not only reveals the achievable frequency stability of NEMS devices, but also provides a theoretical framework to fully optimize noise performance and the mass sensitivity for sensing applications. 29 3.1 Introduction So far we have considered how physical fluctuations convert into the noise sidebands of the carrier and give the conventional definition of phase noise, frequency noise, and Allan deviation, all commonly used to characterize the frequency stability of an oscillator. Here we proceed to investigate phase noise mechanisms affecting NEMS devices. First, we examine the fundamental noise processes intrinsic to NEMS devices.1-3 We begin our discussion from thermomechanical noise, originating from thermally driven random motion of the resonator, by considering the thermal fluctuating force acting on the resonator. We then consider momentum exchange noise, adsorption- desorption noise, and diffusion noise, all arising from gaseous molecules in resonator surroundings. The impinging gaseous molecules can impart momentum randomly to a NEMS device and induce momentum exchange noise. Moreover, when gaseous species adsorb on a NEMS device, typically from the surrounding environment, they can diffuse along the surface in and out of the device and produce diffusion noise.