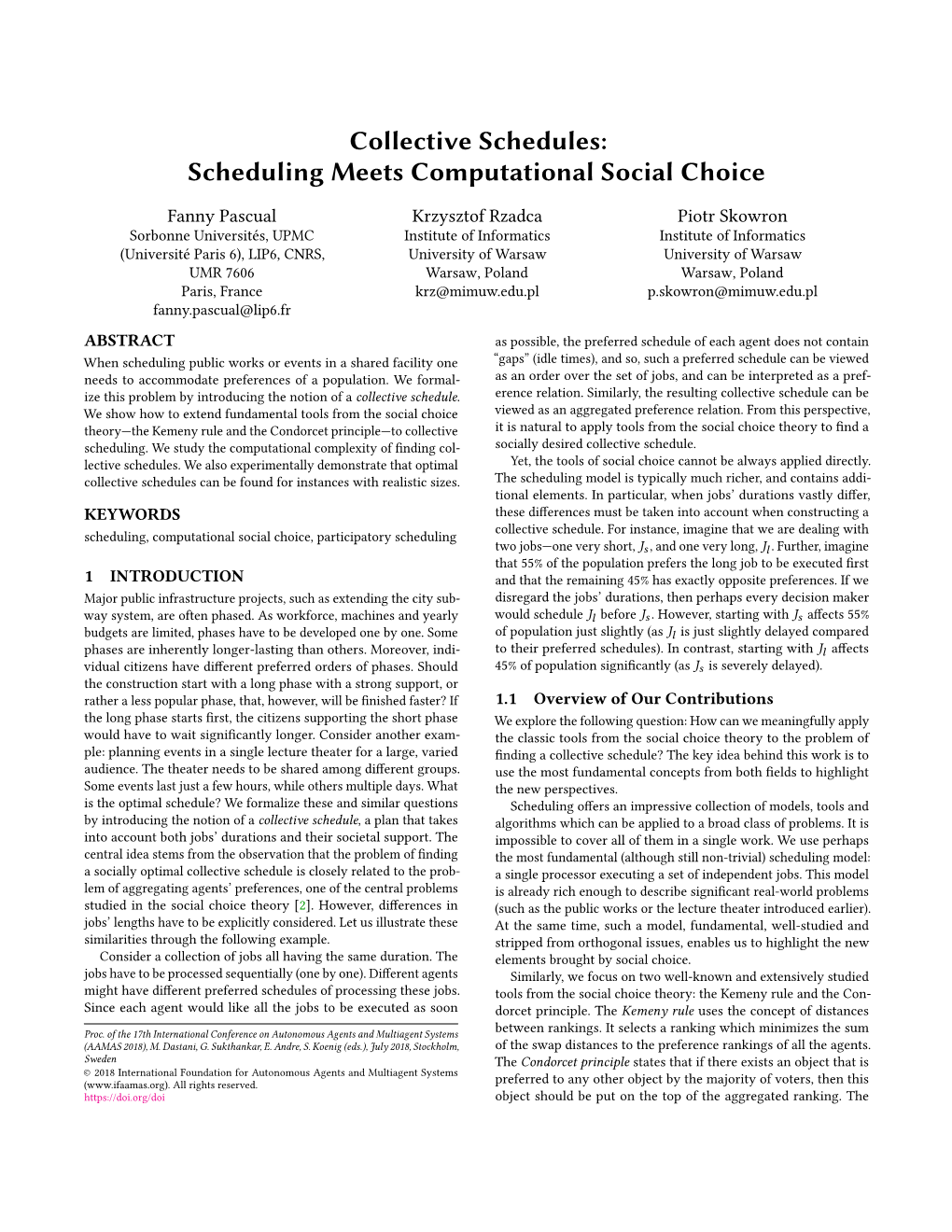
Scheduling Meets Computational Social Choice
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Stable Voting
Stable Voting Wesley H. Hollidayy and Eric Pacuitz y University of California, Berkeley ([email protected]) z University of Maryland ([email protected]) September 12, 2021 Abstract In this paper, we propose a new single-winner voting system using ranked ballots: Stable Voting. The motivating principle of Stable Voting is that if a candidate A would win without another candidate B in the election, and A beats B in a head-to-head majority comparison, then A should still win in the election with B included (unless there is another candidate A0 who has the same kind of claim to winning, in which case a tiebreaker may choose between A and A0). We call this principle Stability for Winners (with Tiebreaking). Stable Voting satisfies this principle while also having a remarkable ability to avoid tied outcomes in elections even with small numbers of voters. 1 Introduction Voting reform efforts in the United States have achieved significant recent successes in replacing Plurality Voting with Instant Runoff Voting (IRV) for major political elections, including the 2018 San Francisco Mayoral Election and the 2021 New York City Mayoral Election. It is striking, by contrast, that Condorcet voting methods are not currently used in any political elections.1 Condorcet methods use the same ranked ballots as IRV but replace the counting of first-place votes with head- to-head comparisons of candidates: do more voters prefer candidate A to candidate B or prefer B to A? If there is a candidate A who beats every other candidate in such a head-to-head majority comparison, this so-called Condorcet winner wins the election. -
A Brief Introductory T T I L C T Ti L Tutorial on Computational Social Choice
A Brief Introductory TtTutori ilal on Compu ttitationa l Social Choice Vincent Conitzer Outline • 1. Introduction to votinggy theory • 2. Hard-to-compute rules • 3. Using computational hardness to prevent manipulation and other undesirable behavior in elections • 4. Selected topics (time permitting) Introduction to voting theory Voting over alternatives voting rule > > (mechanism) determines winner based on votes > > • Can vote over other things too – Where to ggg,jp,o for dinner tonight, other joint plans, … Voting (rank aggregation) • Set of m candidates (aka. alternatives, outcomes) •n voters; each voter ranks all the candidates – E.g., for set of candidates {a, b, c, d}, one possible vote is b > a > d > c – Submitted ranking is called a vote • AvotingA voting rule takes as input a vector of votes (submitted by the voters), and as output produces either: – the winning candidate, or – an aggregate ranking of all candidates • Can vote over just about anything – pppolitical representatives, award nominees, where to go for dinner tonight, joint plans, allocations of tasks/resources, … – Also can consider other applications: e.g., aggregating search engines’ rankinggggs into a single ranking Example voting rules • Scoring rules are defined by a vector (a1, a2, …, am); being ranked ith in a vote gives the candidate ai points – Plurality is defined by (1, 0, 0, …, 0) (winner is candidate that is ranked first most often) – Veto (or anti-plurality) is defined by (1, 1, …, 1, 0) (winner is candidate that is ranked last the least often) – Borda is defined by (m-1, m-2, …, 0) • Plurality with (2-candidate) runoff: top two candidates in terms of plurality score proceed to runoff; whichever is ranked higher than the other by more voters, wins • Single Transferable Vote (STV, aka. -

Generalized Scoring Rules: a Framework That Reconciles Borda and Condorcet
Generalized Scoring Rules: A Framework That Reconciles Borda and Condorcet Lirong Xia Harvard University Generalized scoring rules [Xia and Conitzer 08] are a relatively new class of social choice mech- anisms. In this paper, we survey developments in generalized scoring rules, showing that they provide a fruitful framework to obtain general results, and also reconcile the Borda approach and Condorcet approach via a new social choice axiom. We comment on some high-level ideas behind GSRs and their connection to Machine Learning, and point out some ongoing work and future directions. Categories and Subject Descriptors: J.4 [Computer Applications]: Social and Behavioral Sci- ences|Economics; I.2.11 [Distributed Artificial Intelligence]: Multiagent Systems General Terms: Algorithms, Economics, Theory Additional Key Words and Phrases: Computational social choice, generalized scoring rules 1. INTRODUCTION Social choice theory focuses on developing principles and methods for representation and aggregation of individual ordinal preferences. Perhaps the most well-known application of social choice theory is political elections. Over centuries, many social choice mechanisms have been proposed and analyzed in the context of elections, where each agent (voter) uses a linear order over the alternatives (candidates) to represent her preferences (her vote). For historical reasons, we will use voting rules to denote social choice mechanisms, though we need to keep in mind that the application is not limited to political elections.1 Most existing voting rules fall into one of the following two categories.2 Positional scoring rules: Each alternative gets some points from each agent according to its position in the agent's vote. The alternative with the highest total points wins. -

Approval-Based Elections and Distortion of Voting Rules
Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence (IJCAI-19) Approval-Based Elections and Distortion of Voting Rules Grzegorz Pierczynski , Piotr Skowron University of Warsaw, Warsaw, Poland [email protected], [email protected] Abstract voters and the candidates are represented by points in a metric space M called the issue space. The optimal candidate is the We consider elections where both voters and can- one that minimizes the sum of the distances to all the voters. didates can be associated with points in a metric However, the election rules do not have access to the met- space and voters prefer candidates that are closer to ric space M itself but they only see the ranking-based profile those that are farther away. It is often assumed that induced by M: in this profile the voters rank the candidates the optimal candidate is the one that minimizes the by their distance to themselves, preferring the ones that are total distance to the voters. Yet, the voting rules of- closer to those that are farther. Since the rules do not have ten do not have access to the metric space M and full information about the metric space they cannot always only see preference rankings induced by M. Con- find optimal candidates. The distortion quantifies the worst- sequently, they often are incapable of selecting the case loss of the utility being effect of having only access to optimal candidate. The distortion of a voting rule rankings. Formally, the distortion of a voting rule is the max- measures the worst-case loss of the quality being imum, over all metric spaces, of the following ratio: the sum the result of having access only to preference rank- of the distances between the elected candidate and the vot- ings. -

Ranked-Choice Voting from a Partisan Perspective
Ranked-Choice Voting From a Partisan Perspective Jack Santucci December 21, 2020 Revised December 22, 2020 Abstract Ranked-choice voting (RCV) has come to mean a range of electoral systems. Broadly, they can facilitate (a) majority winners in single-seat districts, (b) majority rule with minority representation in multi-seat districts, or (c) majority sweeps in multi-seat districts. Such systems can be combined with other rules that encourage/discourage slate voting. This paper describes five major versions used in U.S. public elections: Al- ternative Vote (AV), single transferable vote (STV), block-preferential voting (BPV), the bottoms-up system, and AV with numbered posts. It then considers each from the perspective of a `political operative.' Simple models of voting (one with two parties, another with three) draw attention to real-world strategic issues: effects on minority representation, importance of party cues, and reasons for the political operative to care about how voters rank choices. Unsurprisingly, different rules produce different outcomes with the same votes. Specific problems from the operative's perspective are: majority reversal, serving two masters, and undisciplined third-party voters (e.g., `pure' independents). Some of these stem from well-known phenomena, e.g., ballot exhaus- tion/ranking truncation and inter-coalition \vote leakage." The paper also alludes to vote-management tactics, i.e., rationing nominations and ensuring even distributions of first-choice votes. Illustrative examples come from American history and comparative politics. (209 words.) Keywords: Alternative Vote, ballot exhaustion, block-preferential voting, bottoms- up system, exhaustive-preferential system, instant runoff voting, ranked-choice voting, sequential ranked-choice voting, single transferable vote, strategic coordination (10 keywords). -

Computational Perspectives on Democracy
Computational Perspectives on Democracy Anson Kahng CMU-CS-21-126 August 2021 Computer Science Department School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 Thesis Committee: Ariel Procaccia (Chair) Chinmay Kulkarni Nihar Shah Vincent Conitzer (Duke University) David Pennock (Rutgers University) Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy. Copyright c 2021 Anson Kahng This research was sponsored by the National Science Foundation under grant numbers IIS-1350598, CCF- 1525932, and IIS-1714140, the Department of Defense under grant number W911NF1320045, the Office of Naval Research under grant number N000141712428, and the JP Morgan Research grant. The views and conclusions contained in this document are those of the author and should not be interpreted as representing the official policies, either expressed or implied, of any sponsoring institution, the U.S. government or any other entity. Keywords: Computational Social Choice, Theoretical Computer Science, Artificial Intelligence For Grandpa and Harabeoji. iv Abstract Democracy is a natural approach to large-scale decision-making that allows people affected by a potential decision to provide input about the outcome. However, modern implementations of democracy are based on outdated infor- mation technology and must adapt to the changing technological landscape. This thesis explores the relationship between computer science and democracy, which is, crucially, a two-way street—just as principles from computer science can be used to analyze and design democratic paradigms, ideas from democracy can be used to solve hard problems in computer science. Question 1: What can computer science do for democracy? To explore this first question, we examine the theoretical foundations of three democratic paradigms: liquid democracy, participatory budgeting, and multiwinner elections. -

Group Decision Making with Partial Preferences
Group Decision Making with Partial Preferences by Tyler Lu A thesis submitted in conformity with the requirements for the degree of Doctor of Philosophy Graduate Department of Computer Science University of Toronto c Copyright 2015 by Tyler Lu Abstract Group Decision Making with Partial Preferences Tyler Lu Doctor of Philosophy Graduate Department of Computer Science University of Toronto 2015 Group decision making is of fundamental importance in all aspects of a modern society. Many commonly studied decision procedures require that agents provide full preference information. This requirement imposes significant cognitive and time burdens on agents, increases communication overhead, and infringes agent privacy. As a result, specifying full preferences is one of the contributing factors for the limited real-world adoption of some commonly studied voting rules. In this dissertation, we introduce a framework consisting of new concepts, algorithms, and theoretical results to provide a sound foundation on which we can address these problems by being able to make group decisions with only partial preference information. In particular, we focus on single and multi-winner voting. We introduce minimax regret (MMR), a group decision-criterion for partial preferences, which quantifies the loss in social welfare of chosen alternative(s) compared to the unknown, but true winning alternative(s). We develop polynomial-time algorithms for the computation of MMR for a number of common of voting rules, and prove intractability results for other rules. We address preference elicitation, the second part of our framework, which concerns the extraction of only the relevant agent preferences that reduce MMR. We develop a few elicitation strategies, based on common ideas, for different voting rules and query types. -

Measuring Violations of Positive Involvement in Voting*
Measuring Violations of Positive Involvement in Voting* Wesley H. Holliday Eric Pacuit University of California, Berkeley University of Maryland [email protected] [email protected] In the context of computational social choice, we study voting methods that assign a set of winners to each profile of voter preferences. A voting method satisfies the property of positive involvement (PI) if for any election in which a candidate x would be among the winners, adding another voter to the election who ranks x first does not cause x to lose. Surprisingly, a number of standard voting methods violate this natural property. In this paper, we investigate different ways of measuring the extent to which a voting method violates PI, using computer simulations. We consider the probability (under different probability models for preferences) of PI violations in randomly drawn profiles vs. profile- coalition pairs (involving coalitions of different sizes). We argue that in order to choose between a voting method that satisfies PI and one that does not, we should consider the probability of PI violation conditional on the voting methods choosing different winners. We should also relativize the probability of PI violation to what we call voter potency, the probability that a voter causes a candidate to lose. Although absolute frequencies of PI violations may be low, after this conditioning and relativization, we see that under certain voting methods that violate PI, much of a voter’s potency is turned against them—in particular, against their desire to see their favorite candidate elected. 1 Introduction Voting provides a mechanism for resolving conflicts between the preferences of multiple agents in order to arrive at a group choice. -

The Price of Neutrality for the Ranked Pairs Method∗
The Price of Neutrality for the Ranked Pairs Method∗ Markus Brill and Felix Fischer Abstract The complexity of the winner determination problem has been studied for almost all common voting rules. A notable exception, possibly caused by some confusion regarding its exact definition, is the method of ranked pairs. The original version of the method, due to Tideman, yields a social preference function that is irresolute and neutral. A variant introduced subsequently uses an exogenously given tie-breaking rule and therefore fails neutrality. The latter variant is the one most commonly studied in the area of computational social choice, and it is easy to see that its winner determination problem is computationally tractable. We show that by contrast, computing the set of winners selected by Tideman's original ranked pairs method is NP-complete, thus revealing a trade-off between tractability and neutrality. In addition, several results concerning the hardness of manipulation and the complexity of computing possible and necessary winners are shown to follow as corollaries from our findings. 1 Introduction The fundamental problem of social choice theory can be concisely described as follows: given a number of individuals, or voters, each having a preference ordering over a set of alternatives, how can we aggregate these preferences into a collective, or social, preference ordering that is in some sense faithful to the individual preferences? By a preference ordering we here understand a (transitive) ranking of all alternatives, and a function aggregating individual preference orderings into social preference orderings is called a social preference function (SPF).1 A natural idea to construct an SPF is by letting an alternative a be socially preferred to another alternative b if and only if a majority of voters prefers a to b. -

Selecting the Runoff Pair
Selecting the runoff pair James Green-Armytage New Jersey State Treasury Trenton, NJ 08625 [email protected] T. Nicolaus Tideman Department of Economics, Virginia Polytechnic Institute and State University Blacksburg, VA 24061 [email protected] This version: May 9, 2019 Accepted for publication in Public Choice on May 27, 2019 Abstract: Although two-round voting procedures are common, the theoretical voting literature rarely discusses any such rules beyond the traditional plurality runoff rule. Therefore, using four criteria in conjunction with two data-generating processes, we define and evaluate nine “runoff pair selection rules” that comprise two rounds of voting, two candidates in the second round, and a single final winner. The four criteria are: social utility from the expected runoff winner (UEW), social utility from the expected runoff loser (UEL), representativeness of the runoff pair (Rep), and resistance to strategy (RS). We examine three rules from each of three categories: plurality rules, utilitarian rules and Condorcet rules. We find that the utilitarian rules provide relatively high UEW and UEL, but low Rep and RS. Conversely, the plurality rules provide high Rep and RS, but low UEW and UEL. Finally, the Condorcet rules provide high UEW, high RS, and a combination of UEL and Rep that depends which Condorcet rule is used. JEL Classification Codes: D71, D72 Keywords: Runoff election, two-round system, Condorcet, Hare, Borda, approval voting, single transferable vote, CPO-STV. We are grateful to those who commented on an earlier draft of this paper at the 2018 Public Choice Society conference. 2 1. Introduction Voting theory is concerned primarily with evaluating rules for choosing a single winner, based on a single round of voting. -
Arrow's Impossibility Theorem
Arrow’s Impossibility Theorem Some announcements • Final reflections due on Monday. • You now have all of the methods and so you can begin analyzing the results of your election. Today’s Goals • We will discuss various fairness criteria and how the different voting methods violate these criteria. Last Time We have so far discussed the following voting methods. • Plurality Method (Majority Method) • Borda Count Method • Plurality-with-Elimination Method (IRV) • Pairwise Comparison Method • Method of Least Worst Defeat • Ranked Pairs Method • Approval Voting Fairness Criteria The following fairness criteria were developed by Kenneth Arrow, an economist in the 1940s. Economists are often interested in voting theories because of their impact on game theory. The mathematician John Nash (the subject of A Beautiful Mind) won the Nobel Prize in economics for his contributions to game theory. The Majority Criterion A majority candidate should always be the winner. Note that this does not say that a candidate must have a majority to win, only that such a candidate should not lose. Plurality, IRV, Pairwise Comparison, LWD, and Ranked Pairs all satisfy the Majority Criterion. The Majority Criterion The Borda Count Method violates the Majority Criterion. Number of voters 6 2 3 1st A B C 2nd B C D 3rd C D B 4th D A A Even though A had a majority of votes it only has 29 points. B is the winner with 32 points. Moral: Borda Count punishes polarizing candidates. The Condorcet Criterion A Condorcet candidate should always be the winner. Recall that a Condorcet Candidate is one that beats all other candidates in a head-to-head (pairwise) comparison. -

Practical Algorithms for Multi-Stage Voting Rules with Parallel Universes Tiebreaking
Practical Algorithms for Multi-Stage Voting Rules with Parallel Universes Tiebreaking Jun Wang and Sujoy Sikdar and Tyler Shepherd Zhibing Zhao and Chunheng Jiang and Lirong Xia Rensselaer Polytechnic Institute 110 8th Street, Troy, NY, USA fwangj38, sikdas, shepht2, zhaoz6, [email protected], [email protected] Abstract Ties do actually occur in real-world votes under STV. On Preflib (Mattei and Walsh 2013) data, 9.2% of profiles have STV and ranked pairs (RP) are two well-studied voting rules more than one PUT-winner under STV. There are two main for group decision-making. They proceed in multiple rounds, motivations for computing all PUT-winners. First, it is vital and are affected by how ties are broken in each round. How- in a democracy that the outcome not be decided by an arbi- ever, the literature is surprisingly vague about how ties should be broken. We propose the first algorithms for computing trary or random tiebreaking rule, which will violate the neu- the set of alternatives that are winners under some tiebreak- trality of the system (Brill and Fischer 2012). Second, even ing mechanism under STV and RP, which is also known for the case of a unique PUT-winner, it is important to prove as parallel-universes tiebreaking (PUT). Unfortunately, PUT- that the winner is unique despite ambiguity in tiebreaking. winners are NP-complete to compute under STV and RP, and In an election, we would prefer the results to be transparent standard search algorithms from AI do not apply. We propose about who all the winners could have been.