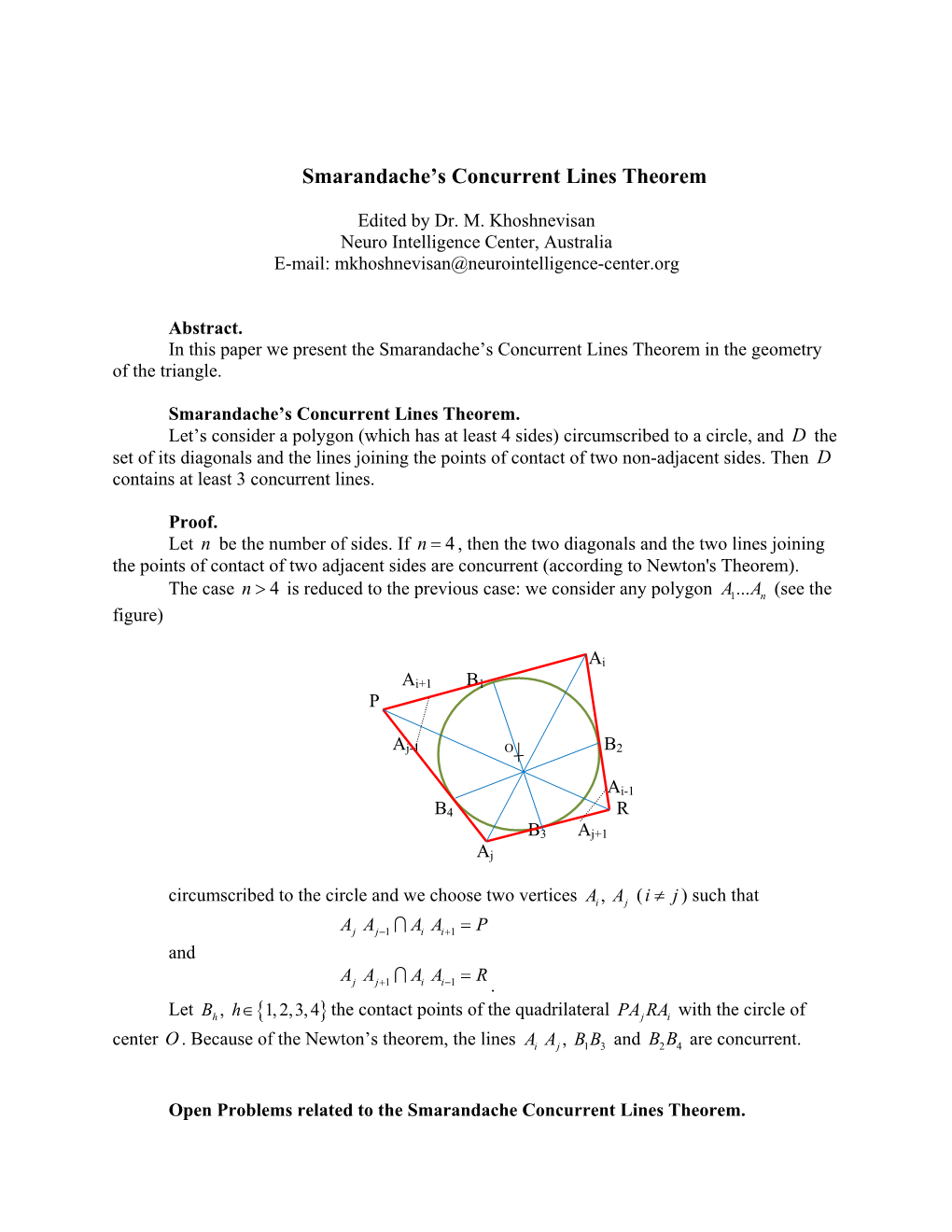
Smarandache's Concurrent Lines Theorem
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Projective Geometry: a Short Introduction
Projective Geometry: A Short Introduction Lecture Notes Edmond Boyer Master MOSIG Introduction to Projective Geometry Contents 1 Introduction 2 1.1 Objective . .2 1.2 Historical Background . .3 1.3 Bibliography . .4 2 Projective Spaces 5 2.1 Definitions . .5 2.2 Properties . .8 2.3 The hyperplane at infinity . 12 3 The projective line 13 3.1 Introduction . 13 3.2 Projective transformation of P1 ................... 14 3.3 The cross-ratio . 14 4 The projective plane 17 4.1 Points and lines . 17 4.2 Line at infinity . 18 4.3 Homographies . 19 4.4 Conics . 20 4.5 Affine transformations . 22 4.6 Euclidean transformations . 22 4.7 Particular transformations . 24 4.8 Transformation hierarchy . 25 Grenoble Universities 1 Master MOSIG Introduction to Projective Geometry Chapter 1 Introduction 1.1 Objective The objective of this course is to give basic notions and intuitions on projective geometry. The interest of projective geometry arises in several visual comput- ing domains, in particular computer vision modelling and computer graphics. It provides a mathematical formalism to describe the geometry of cameras and the associated transformations, hence enabling the design of computational ap- proaches that manipulates 2D projections of 3D objects. In that respect, a fundamental aspect is the fact that objects at infinity can be represented and manipulated with projective geometry and this in contrast to the Euclidean geometry. This allows perspective deformations to be represented as projective transformations. Figure 1.1: Example of perspective deformation or 2D projective transforma- tion. Another argument is that Euclidean geometry is sometimes difficult to use in algorithms, with particular cases arising from non-generic situations (e.g. -

Definition Concurrent Lines Are Lines That Intersect in a Single Point. 1. Theorem 128: the Perpendicular Bisectors of the Sides
14.3 Notes Thursday, April 23, 2009 12:49 PM Definition 1. Concurrent lines are lines that intersect in a single point. j k m Theorem 128: The perpendicular bisectors of the sides of a triangle are concurrent at a point that is equidistant from the vertices of the triangle. This point is called the circumcenter of the triangle. D E F Theorem 129: The bisectors of the angles of a triangle are concurrent at a point that is equidistant from the sides of the triangle. This point is called the incenter of the triangle. A B Notes Page 1 C A B C Theorem 130: The lines containing the altitudes of a triangle are concurrent. This point is called the orthocenter of the triangle. A B C Theorem 131: The medians of a triangle are concurrent at a point that is 2/3 of the way from any vertex of the triangle to the midpoint of the opposite side. This point is called the centroid of the of the triangle. Example 1: Construct the incenter of ABC A B C Notes Page 2 14.4 Notes Friday, April 24, 2009 1:10 PM Examples 1-3 on page 670 1. Construct an angle whose measure is equal to 2A - B. A B 2. Construct the tangent to circle P at point A. P A 3. Construct a tangent to circle O from point P. Notes Page 3 3. Construct a tangent to circle O from point P. O P Notes Page 4 14.5 notes Tuesday, April 28, 2009 8:26 AM Constructions 9, 10, 11 Geometric mean Notes Page 5 14.6 Notes Tuesday, April 28, 2009 9:54 AM Construct: ABC, given {a, ha, B} a Ha B A b c B C a Notes Page 6 14.1 Notes Tuesday, April 28, 2009 10:01 AM Definition: A locus is a set consisting of all points, and only the points, that satisfy specific conditions. -

Geometry: Neutral MATH 3120, Spring 2016 Many Theorems of Geometry Are True Regardless of Which Parallel Postulate Is Used
Geometry: Neutral MATH 3120, Spring 2016 Many theorems of geometry are true regardless of which parallel postulate is used. A neutral geom- etry is one in which no parallel postulate exists, and the theorems of a netural geometry are true for Euclidean and (most) non-Euclidean geomteries. Spherical geometry is a special case of Non-Euclidean geometries where the great circles on the sphere are lines. This leads to spherical trigonometry where triangles have angle measure sums greater than 180◦. While this is a non-Euclidean geometry, spherical geometry develops along a separate path where the axioms and theorems of neutral geometry do not typically apply. The axioms and theorems of netural geometry apply to Euclidean and hyperbolic geometries. The theorems below can be proven using the SMSG axioms 1 through 15. In the SMSG axiom list, Axiom 16 is the Euclidean parallel postulate. A neutral geometry assumes only the first 15 axioms of the SMSG set. Notes on notation: The SMSG axioms refer to the length or measure of line segments and the measure of angles. Thus, we will use the notation AB to describe a line segment and AB to denote its length −−! −! or measure. We refer to the angle formed by AB and AC as \BAC (with vertex A) and denote its measure as m\BAC. 1 Lines and Angles Definitions: Congruence • Segments and Angles. Two segments (or angles) are congruent if and only if their measures are equal. • Polygons. Two polygons are congruent if and only if there exists a one-to-one correspondence between their vertices such that all their corresponding sides (line sgements) and all their corre- sponding angles are congruent. -

The Dual Theorem Concerning Aubert Line
The Dual Theorem concerning Aubert Line Professor Ion Patrascu, National College "Buzeşti Brothers" Craiova - Romania Professor Florentin Smarandache, University of New Mexico, Gallup, USA In this article we introduce the concept of Bobillier transversal of a triangle with respect to a point in its plan; we prove the Aubert Theorem about the collinearity of the orthocenters in the triangles determined by the sides and the diagonals of a complete quadrilateral, and we obtain the Dual Theorem of this Theorem. Theorem 1 (E. Bobillier) Let 퐴퐵퐶 be a triangle and 푀 a point in the plane of the triangle so that the perpendiculars taken in 푀, and 푀퐴, 푀퐵, 푀퐶 respectively, intersect the sides 퐵퐶, 퐶퐴 and 퐴퐵 at 퐴푚, 퐵푚 and 퐶푚. Then the points 퐴푚, 퐵푚 and 퐶푚 are collinear. 퐴푚퐵 Proof We note that = 퐴푚퐶 aria (퐵푀퐴푚) (see Fig. 1). aria (퐶푀퐴푚) 1 Area (퐵푀퐴푚) = ∙ 퐵푀 ∙ 푀퐴푚 ∙ 2 sin(퐵푀퐴푚̂ ). 1 Area (퐶푀퐴푚) = ∙ 퐶푀 ∙ 푀퐴푚 ∙ 2 sin(퐶푀퐴푚̂ ). Since 1 3휋 푚(퐶푀퐴푚̂ ) = − 푚(퐴푀퐶̂ ), 2 it explains that sin(퐶푀퐴푚̂ ) = − cos(퐴푀퐶̂ ); 휋 sin(퐵푀퐴푚̂ ) = sin (퐴푀퐵̂ − ) = − cos(퐴푀퐵̂ ). 2 Therefore: 퐴푚퐵 푀퐵 ∙ cos(퐴푀퐵̂ ) = (1). 퐴푚퐶 푀퐶 ∙ cos(퐴푀퐶̂ ) In the same way, we find that: 퐵푚퐶 푀퐶 cos(퐵푀퐶̂ ) = ∙ (2); 퐵푚퐴 푀퐴 cos(퐴푀퐵̂ ) 퐶푚퐴 푀퐴 cos(퐴푀퐶̂ ) = ∙ (3). 퐶푚퐵 푀퐵 cos(퐵푀퐶̂ ) The relations (1), (2), (3), and the reciprocal Theorem of Menelaus lead to the collinearity of points 퐴푚, 퐵푚, 퐶푚. Note Bobillier's Theorem can be obtained – by converting the duality with respect to a circle – from the theorem relative to the concurrency of the heights of a triangle. -

Advanced Euclidean Geometry
Advanced Euclidean Geometry Paul Yiu Summer 2016 Department of Mathematics Florida Atlantic University July 18, 2016 Summer 2016 Contents 1 Some Basic Theorems 101 1.1 The Pythagorean Theorem . ............................ 101 1.2 Constructions of geometric mean . ........................ 104 1.3 The golden ratio . .......................... 106 1.3.1 The regular pentagon . ............................ 106 1.4 Basic construction principles ............................ 108 1.4.1 Perpendicular bisector locus . ....................... 108 1.4.2 Angle bisector locus . ............................ 109 1.4.3 Tangency of circles . ......................... 110 1.4.4 Construction of tangents of a circle . ............... 110 1.5 The intersecting chords theorem ........................... 112 1.6 Ptolemy’s theorem . ................................. 114 2 The laws of sines and cosines 115 2.1 The law of sines . ................................ 115 2.2 The orthocenter ................................... 116 2.3 The law of cosines .................................. 117 2.4 The centroid ..................................... 120 2.5 The angle bisector theorem . ............................ 121 2.5.1 The lengths of the bisectors . ........................ 121 2.6 The circle of Apollonius . ............................ 123 3 The tritangent circles 125 3.1 The incircle ..................................... 125 3.2 Euler’s formula . ................................ 128 3.3 Steiner’s porism ................................... 129 3.4 The excircles .................................... -
![Arxiv:2101.02592V1 [Math.HO] 6 Jan 2021 in His Seminal Paper [10]](https://docslib.b-cdn.net/cover/7323/arxiv-2101-02592v1-math-ho-6-jan-2021-in-his-seminal-paper-10-957323.webp)
Arxiv:2101.02592V1 [Math.HO] 6 Jan 2021 in His Seminal Paper [10]
International Journal of Computer Discovered Mathematics (IJCDM) ISSN 2367-7775 ©IJCDM Volume 5, 2020, pp. 13{41 Received 6 August 2020. Published on-line 30 September 2020 web: http://www.journal-1.eu/ ©The Author(s) This article is published with open access1. Arrangement of Central Points on the Faces of a Tetrahedron Stanley Rabinowitz 545 Elm St Unit 1, Milford, New Hampshire 03055, USA e-mail: [email protected] web: http://www.StanleyRabinowitz.com/ Abstract. We systematically investigate properties of various triangle centers (such as orthocenter or incenter) located on the four faces of a tetrahedron. For each of six types of tetrahedra, we examine over 100 centers located on the four faces of the tetrahedron. Using a computer, we determine when any of 16 con- ditions occur (such as the four centers being coplanar). A typical result is: The lines from each vertex of a circumscriptible tetrahedron to the Gergonne points of the opposite face are concurrent. Keywords. triangle centers, tetrahedra, computer-discovered mathematics, Eu- clidean geometry. Mathematics Subject Classification (2020). 51M04, 51-08. 1. Introduction Over the centuries, many notable points have been found that are associated with an arbitrary triangle. Familiar examples include: the centroid, the circumcenter, the incenter, and the orthocenter. Of particular interest are those points that Clark Kimberling classifies as \triangle centers". He notes over 100 such points arXiv:2101.02592v1 [math.HO] 6 Jan 2021 in his seminal paper [10]. Given an arbitrary tetrahedron and a choice of triangle center (for example, the circumcenter), we may locate this triangle center in each face of the tetrahedron. -

Lemmas in Euclidean Geometry1 Yufei Zhao [email protected]
IMO Training 2007 Lemmas in Euclidean Geometry Yufei Zhao Lemmas in Euclidean Geometry1 Yufei Zhao [email protected] 1. Construction of the symmedian. Let ABC be a triangle and Γ its circumcircle. Let the tangent to Γ at B and C meet at D. Then AD coincides with a symmedian of △ABC. (The symmedian is the reflection of the median across the angle bisector, all through the same vertex.) A A A O B C M B B F C E M' C P D D Q D We give three proofs. The first proof is a straightforward computation using Sine Law. The second proof uses similar triangles. The third proof uses projective geometry. First proof. Let the reflection of AD across the angle bisector of ∠BAC meet BC at M ′. Then ′ ′ sin ∠BAM ′ ′ BM AM sin ∠ABC sin ∠BAM sin ∠ABD sin ∠CAD sin ∠ABD CD AD ′ = ′ sin ∠CAM ′ = ∠ ∠ ′ = ∠ ∠ = = 1 M C AM sin ∠ACB sin ACD sin CAM sin ACD sin BAD AD BD Therefore, AM ′ is the median, and thus AD is the symmedian. Second proof. Let O be the circumcenter of ABC and let ω be the circle centered at D with radius DB. Let lines AB and AC meet ω at P and Q, respectively. Since ∠PBQ = ∠BQC + ∠BAC = 1 ∠ ∠ ◦ 2 ( BDC + DOC) = 90 , we see that PQ is a diameter of ω and hence passes through D. Since ∠ABC = ∠AQP and ∠ACB = ∠AP Q, we see that triangles ABC and AQP are similar. If M is the midpoint of BC, noting that D is the midpoint of QP , the similarity implies that ∠BAM = ∠QAD, from which the result follows. -

Chain Theorems of Lines Circles and Planes
Chain Theorems of Lines Circles and Planes by Lhakpa Tsering(Labaciren) Master Thesis in Mathematics (Master of Science) Department of Mathematics Faculty of Mathematics and Natural Sciences University of Oslo May 2008 Det matematisk- naturvitenskapelige fakultet Universitetet i Oslo 2 2 3 Introduction In this paper we will prove Clifford chain theorem for general lines in the plane by using real cross ratio lemma. We will then discuss the Clifford chain theorem for degenerate lines and will obtain 6 types of Clifford figures with examples. We will also find that the Clifford chain theorem fails for some cases and we will show some examples. At the end we will obtain three similar chain theorems for circles and planes by applying Clifford chain theorem for general lines in the plane under the transformations of stereographic projection and circle inversion. These three chain theorems are (1): chain theorem for general circles on the sphere, (2): chain theorem for general circles in the plane and (3): chain theorem for general planes in the space. We will also prove Miquel's pentagon theorem by applying Clifford chain theorem for four general lines. In 1871, W. K. Clifford announced a series of theorems which we call Clifford line chains. Two straight lines determine a point, which is the intersection point. Three straight lines determine a circle, which is the circumcircle of the triangle formed by the three lines. In a 4 lines case, the four circumcircles, of the four triangles formed by the four lines taking three at each time, pass through a point, the Wallace or focal point of the 4 lines. -

An Introduction to Projective Geometry for Computer Vision 1
An Intro duction to Pro jective Geometry for computer vision Stan Birch eld 1 Intro duction We are all familiar with Euclidean geometry and with the fact that it describ es our three- dimensional world so well. In Euclidean geometry, the sides of ob jects have lengths, inter- secting lines determine angles b etween them, and two lines are said to b e parallel if they lie in the same plane and never meet. Moreover, these prop erties do not change when the Euclidean transformations translation and rotation are applied. Since Euclidean geome- try describ es our world so well, it is at rst tempting to think that it is the only typ e of geometry. Indeed, the word geometry means \measurement of the earth." However, when we consider the imaging pro cess of a camera, it b ecomes clear that Euclidean geometry is insucient: Lengths and angles are no longer preserved, and parallel lines mayintersect. Euclidean geometry is actually a subset of what is known as projective geometry.In fact, there are two geometries b etween them: similarity and ane.To see the relationships between these di erent geometries, consult Figure 1. Pro jective geometry mo dels well the imaging pro cess of a camera b ecause it allowsamuch larger class of transformations than just translations and rotations, a class which includes p ersp ective pro jections. Of course, the drawback is that fewer measures are preserved | certainly not lengths, angles, or parallelism. Pro jective transformations preservetyp e that is, p oints remain p oints and lines remain lines, incidence that is, whether a p oint lies on a line, and a measure known as the cross ratio, which will b e describ ed in section 2.4. -

Section 9.1- Basic Notions
c Kendra Kilmer May 19, 2009 Section 9.1- Basic Notions The fundamental building blocks of geometry are points, lines, and planes. There is no formal definition of these terms but we can present an intuitive notion of each: Linear Notions: • Collinear points are points on the same line. (Any two points are collinear but not every three points have to be collinear.) • Point B is between points A and C on line l if B 6= A, B 6= C and B is on the part of the line connecting A and C. • A line segment, or segment, is a subset of a line that contains two points of the line and all points between those two points. • A ray is a subset of a line that contains the endpoint and all points on the line on one side of the point. 1 c Kendra Kilmer May 19, 2009 Planar Notions: • Points in the same plane are coplanar. • Noncoplanar points cannot be placed in single plane. • Lines in the same plane are coplanar lines. • Skew lines are lines that do not intersect, and there is no plane that contains them. • Intersecting lines are two coplanar lines with exactly one point in common. • Concurrent lines are lines that contain the same point. • Two distinct coplanar lines m and n that have no points in common are parallel lines. Example 1: Let’s think about the following questions: a) How many different lines can be drawn through two points? b) Can skew lines be parallel? 2 c Kendra Kilmer May 19, 2009 Properties of Points, Lines, and Planes: 1. -

Concurrent Lines Lesson and Project
Concurrent Lines Lesson and Project C. Sormani, MTTI, Lehman College, CUNY MAT631, Spring 2009 Goal: To review the concurrence of the angle bisectors, medians, perpendicular bisec- tors and altitudes of triangles. Warmup Problems: 1. Three lines are said to be concurrent if they meet at a common point. Prove that the lines y = 2x, y = 3x and x = 0 are concurrent by graphing, finding their common point and verifying this point lies on all three lines algebraically. 2. Recall that the distance between a point P and a line l, denoted d(P; l), is the length of the segment PQ where Q is on l and PQ is perpendicular to l. Prove that the circle about P of radius R = d(P; l) meets l exactly at one point and that point is Q. Hint: assume on the contrary that the circle meets the line at two points, form an isosceles triangle and reach a contradiction. We say that the line is tangent to the circle and call Q the point of tangency. 3. Draw a triangle ∆ABC and construct the angle bisector, lA of the angle 6 BAC using a compass and straight edge. Prove that for all P 2 lA, we have d(P; AB) = d(P; AC). 4. Prove the converse: if X is a point such that d(X; AB) = d(X; AC), then X is on the angle bisector of 6 BAC. PART I: In the last two warmup problems we proved that: The angle bisector of 6 BAC is the set fX : d(X; AB) = d(X; AC)g. -

Notes on Euclidean Geometry Kiran Kedlaya Based On
Notes on Euclidean Geometry Kiran Kedlaya based on notes for the Math Olympiad Program (MOP) Version 1.0, last revised August 3, 1999 c Kiran S. Kedlaya. This is an unfinished manuscript distributed for personal use only. In particular, any publication of all or part of this manuscript without prior consent of the author is strictly prohibited. Please send all comments and corrections to the author at [email protected]. Thank you! Contents 1 Tricks of the trade 1 1.1 Slicing and dicing . 1 1.2 Angle chasing . 2 1.3 Sign conventions . 3 1.4 Working backward . 6 2 Concurrence and Collinearity 8 2.1 Concurrent lines: Ceva’s theorem . 8 2.2 Collinear points: Menelaos’ theorem . 10 2.3 Concurrent perpendiculars . 12 2.4 Additional problems . 13 3 Transformations 14 3.1 Rigid motions . 14 3.2 Homothety . 16 3.3 Spiral similarity . 17 3.4 Affine transformations . 19 4 Circular reasoning 21 4.1 Powerofapoint.................................. 21 4.2 Radical axis . 22 4.3 The Pascal-Brianchon theorems . 24 4.4 Simson line . 25 4.5 Circle of Apollonius . 26 4.6 Additional problems . 27 5 Triangle trivia 28 5.1 Centroid . 28 5.2 Incenter and excenters . 28 5.3 Circumcenter and orthocenter . 30 i 5.4 Gergonne and Nagel points . 32 5.5 Isogonal conjugates . 32 5.6 Brocard points . 33 5.7 Miscellaneous . 34 6 Quadrilaterals 36 6.1 General quadrilaterals . 36 6.2 Cyclic quadrilaterals . 36 6.3 Circumscribed quadrilaterals . 38 6.4 Complete quadrilaterals . 39 7 Inversive Geometry 40 7.1 Inversion .