New Characterizations of Tangential Quadrilaterals
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Projective Geometry: a Short Introduction
Projective Geometry: A Short Introduction Lecture Notes Edmond Boyer Master MOSIG Introduction to Projective Geometry Contents 1 Introduction 2 1.1 Objective . .2 1.2 Historical Background . .3 1.3 Bibliography . .4 2 Projective Spaces 5 2.1 Definitions . .5 2.2 Properties . .8 2.3 The hyperplane at infinity . 12 3 The projective line 13 3.1 Introduction . 13 3.2 Projective transformation of P1 ................... 14 3.3 The cross-ratio . 14 4 The projective plane 17 4.1 Points and lines . 17 4.2 Line at infinity . 18 4.3 Homographies . 19 4.4 Conics . 20 4.5 Affine transformations . 22 4.6 Euclidean transformations . 22 4.7 Particular transformations . 24 4.8 Transformation hierarchy . 25 Grenoble Universities 1 Master MOSIG Introduction to Projective Geometry Chapter 1 Introduction 1.1 Objective The objective of this course is to give basic notions and intuitions on projective geometry. The interest of projective geometry arises in several visual comput- ing domains, in particular computer vision modelling and computer graphics. It provides a mathematical formalism to describe the geometry of cameras and the associated transformations, hence enabling the design of computational ap- proaches that manipulates 2D projections of 3D objects. In that respect, a fundamental aspect is the fact that objects at infinity can be represented and manipulated with projective geometry and this in contrast to the Euclidean geometry. This allows perspective deformations to be represented as projective transformations. Figure 1.1: Example of perspective deformation or 2D projective transforma- tion. Another argument is that Euclidean geometry is sometimes difficult to use in algorithms, with particular cases arising from non-generic situations (e.g. -

Properties of Equidiagonal Quadrilaterals (2014)
Forum Geometricorum Volume 14 (2014) 129–144. FORUM GEOM ISSN 1534-1178 Properties of Equidiagonal Quadrilaterals Martin Josefsson Abstract. We prove eight necessary and sufficient conditions for a convex quadri- lateral to have congruent diagonals, and one dual connection between equidiag- onal and orthodiagonal quadrilaterals. Quadrilaterals with both congruent and perpendicular diagonals are also discussed, including a proposal for what they may be called and how to calculate their area in several ways. Finally we derive a cubic equation for calculating the lengths of the congruent diagonals. 1. Introduction One class of quadrilaterals that have received little interest in the geometrical literature are the equidiagonal quadrilaterals. They are defined to be quadrilat- erals with congruent diagonals. Three well known special cases of them are the isosceles trapezoid, the rectangle and the square, but there are other as well. Fur- thermore, there exists many equidiagonal quadrilaterals that besides congruent di- agonals have no special properties. Take any convex quadrilateral ABCD and move the vertex D along the line BD into a position D such that AC = BD. Then ABCD is an equidiagonal quadrilateral (see Figure 1). C D D A B Figure 1. An equidiagonal quadrilateral ABCD Before we begin to study equidiagonal quadrilaterals, let us define our notations. In a convex quadrilateral ABCD, the sides are labeled a = AB, b = BC, c = CD and d = DA, and the diagonals are p = AC and q = BD. We use θ for the angle between the diagonals. The line segments connecting the midpoints of opposite sides of a quadrilateral are called the bimedians and are denoted m and n, where m connects the midpoints of the sides a and c. -

Definition Concurrent Lines Are Lines That Intersect in a Single Point. 1. Theorem 128: the Perpendicular Bisectors of the Sides
14.3 Notes Thursday, April 23, 2009 12:49 PM Definition 1. Concurrent lines are lines that intersect in a single point. j k m Theorem 128: The perpendicular bisectors of the sides of a triangle are concurrent at a point that is equidistant from the vertices of the triangle. This point is called the circumcenter of the triangle. D E F Theorem 129: The bisectors of the angles of a triangle are concurrent at a point that is equidistant from the sides of the triangle. This point is called the incenter of the triangle. A B Notes Page 1 C A B C Theorem 130: The lines containing the altitudes of a triangle are concurrent. This point is called the orthocenter of the triangle. A B C Theorem 131: The medians of a triangle are concurrent at a point that is 2/3 of the way from any vertex of the triangle to the midpoint of the opposite side. This point is called the centroid of the of the triangle. Example 1: Construct the incenter of ABC A B C Notes Page 2 14.4 Notes Friday, April 24, 2009 1:10 PM Examples 1-3 on page 670 1. Construct an angle whose measure is equal to 2A - B. A B 2. Construct the tangent to circle P at point A. P A 3. Construct a tangent to circle O from point P. Notes Page 3 3. Construct a tangent to circle O from point P. O P Notes Page 4 14.5 notes Tuesday, April 28, 2009 8:26 AM Constructions 9, 10, 11 Geometric mean Notes Page 5 14.6 Notes Tuesday, April 28, 2009 9:54 AM Construct: ABC, given {a, ha, B} a Ha B A b c B C a Notes Page 6 14.1 Notes Tuesday, April 28, 2009 10:01 AM Definition: A locus is a set consisting of all points, and only the points, that satisfy specific conditions. -

Downloaded from Bookstore.Ams.Org 30-60-90 Triangle, 190, 233 36-72
Index 30-60-90 triangle, 190, 233 intersects interior of a side, 144 36-72-72 triangle, 226 to the base of an isosceles triangle, 145 360 theorem, 96, 97 to the hypotenuse, 144 45-45-90 triangle, 190, 233 to the longest side, 144 60-60-60 triangle, 189 Amtrak model, 29 and (logical conjunction), 385 AA congruence theorem for asymptotic angle, 83 triangles, 353 acute, 88 AA similarity theorem, 216 included between two sides, 104 AAA congruence theorem in hyperbolic inscribed in a semicircle, 257 geometry, 338 inscribed in an arc, 257 AAA construction theorem, 191 obtuse, 88 AAASA congruence, 197, 354 of a polygon, 156 AAS congruence theorem, 119 of a triangle, 103 AASAS congruence, 179 of an asymptotic triangle, 351 ABCD property of rigid motions, 441 on a side of a line, 149 absolute value, 434 opposite a side, 104 acute angle, 88 proper, 84 acute triangle, 105 right, 88 adapted coordinate function, 72 straight, 84 adjacency lemma, 98 zero, 84 adjacent angles, 90, 91 angle addition theorem, 90 adjacent edges of a polygon, 156 angle bisector, 100, 147 adjacent interior angle, 113 angle bisector concurrence theorem, 268 admissible decomposition, 201 angle bisector proportion theorem, 219 algebraic number, 317 angle bisector theorem, 147 all-or-nothing theorem, 333 converse, 149 alternate interior angles, 150 angle construction theorem, 88 alternate interior angles postulate, 323 angle criterion for convexity, 160 alternate interior angles theorem, 150 angle measure, 54, 85 converse, 185, 323 between two lines, 357 altitude concurrence theorem, -

Geometry: Neutral MATH 3120, Spring 2016 Many Theorems of Geometry Are True Regardless of Which Parallel Postulate Is Used
Geometry: Neutral MATH 3120, Spring 2016 Many theorems of geometry are true regardless of which parallel postulate is used. A neutral geom- etry is one in which no parallel postulate exists, and the theorems of a netural geometry are true for Euclidean and (most) non-Euclidean geomteries. Spherical geometry is a special case of Non-Euclidean geometries where the great circles on the sphere are lines. This leads to spherical trigonometry where triangles have angle measure sums greater than 180◦. While this is a non-Euclidean geometry, spherical geometry develops along a separate path where the axioms and theorems of neutral geometry do not typically apply. The axioms and theorems of netural geometry apply to Euclidean and hyperbolic geometries. The theorems below can be proven using the SMSG axioms 1 through 15. In the SMSG axiom list, Axiom 16 is the Euclidean parallel postulate. A neutral geometry assumes only the first 15 axioms of the SMSG set. Notes on notation: The SMSG axioms refer to the length or measure of line segments and the measure of angles. Thus, we will use the notation AB to describe a line segment and AB to denote its length −−! −! or measure. We refer to the angle formed by AB and AC as \BAC (with vertex A) and denote its measure as m\BAC. 1 Lines and Angles Definitions: Congruence • Segments and Angles. Two segments (or angles) are congruent if and only if their measures are equal. • Polygons. Two polygons are congruent if and only if there exists a one-to-one correspondence between their vertices such that all their corresponding sides (line sgements) and all their corre- sponding angles are congruent. -

The Dual Theorem Concerning Aubert Line
The Dual Theorem concerning Aubert Line Professor Ion Patrascu, National College "Buzeşti Brothers" Craiova - Romania Professor Florentin Smarandache, University of New Mexico, Gallup, USA In this article we introduce the concept of Bobillier transversal of a triangle with respect to a point in its plan; we prove the Aubert Theorem about the collinearity of the orthocenters in the triangles determined by the sides and the diagonals of a complete quadrilateral, and we obtain the Dual Theorem of this Theorem. Theorem 1 (E. Bobillier) Let 퐴퐵퐶 be a triangle and 푀 a point in the plane of the triangle so that the perpendiculars taken in 푀, and 푀퐴, 푀퐵, 푀퐶 respectively, intersect the sides 퐵퐶, 퐶퐴 and 퐴퐵 at 퐴푚, 퐵푚 and 퐶푚. Then the points 퐴푚, 퐵푚 and 퐶푚 are collinear. 퐴푚퐵 Proof We note that = 퐴푚퐶 aria (퐵푀퐴푚) (see Fig. 1). aria (퐶푀퐴푚) 1 Area (퐵푀퐴푚) = ∙ 퐵푀 ∙ 푀퐴푚 ∙ 2 sin(퐵푀퐴푚̂ ). 1 Area (퐶푀퐴푚) = ∙ 퐶푀 ∙ 푀퐴푚 ∙ 2 sin(퐶푀퐴푚̂ ). Since 1 3휋 푚(퐶푀퐴푚̂ ) = − 푚(퐴푀퐶̂ ), 2 it explains that sin(퐶푀퐴푚̂ ) = − cos(퐴푀퐶̂ ); 휋 sin(퐵푀퐴푚̂ ) = sin (퐴푀퐵̂ − ) = − cos(퐴푀퐵̂ ). 2 Therefore: 퐴푚퐵 푀퐵 ∙ cos(퐴푀퐵̂ ) = (1). 퐴푚퐶 푀퐶 ∙ cos(퐴푀퐶̂ ) In the same way, we find that: 퐵푚퐶 푀퐶 cos(퐵푀퐶̂ ) = ∙ (2); 퐵푚퐴 푀퐴 cos(퐴푀퐵̂ ) 퐶푚퐴 푀퐴 cos(퐴푀퐶̂ ) = ∙ (3). 퐶푚퐵 푀퐵 cos(퐵푀퐶̂ ) The relations (1), (2), (3), and the reciprocal Theorem of Menelaus lead to the collinearity of points 퐴푚, 퐵푚, 퐶푚. Note Bobillier's Theorem can be obtained – by converting the duality with respect to a circle – from the theorem relative to the concurrency of the heights of a triangle. -

Advanced Euclidean Geometry
Advanced Euclidean Geometry Paul Yiu Summer 2016 Department of Mathematics Florida Atlantic University July 18, 2016 Summer 2016 Contents 1 Some Basic Theorems 101 1.1 The Pythagorean Theorem . ............................ 101 1.2 Constructions of geometric mean . ........................ 104 1.3 The golden ratio . .......................... 106 1.3.1 The regular pentagon . ............................ 106 1.4 Basic construction principles ............................ 108 1.4.1 Perpendicular bisector locus . ....................... 108 1.4.2 Angle bisector locus . ............................ 109 1.4.3 Tangency of circles . ......................... 110 1.4.4 Construction of tangents of a circle . ............... 110 1.5 The intersecting chords theorem ........................... 112 1.6 Ptolemy’s theorem . ................................. 114 2 The laws of sines and cosines 115 2.1 The law of sines . ................................ 115 2.2 The orthocenter ................................... 116 2.3 The law of cosines .................................. 117 2.4 The centroid ..................................... 120 2.5 The angle bisector theorem . ............................ 121 2.5.1 The lengths of the bisectors . ........................ 121 2.6 The circle of Apollonius . ............................ 123 3 The tritangent circles 125 3.1 The incircle ..................................... 125 3.2 Euler’s formula . ................................ 128 3.3 Steiner’s porism ................................... 129 3.4 The excircles .................................... -
![Arxiv:2101.02592V1 [Math.HO] 6 Jan 2021 in His Seminal Paper [10]](https://docslib.b-cdn.net/cover/7323/arxiv-2101-02592v1-math-ho-6-jan-2021-in-his-seminal-paper-10-957323.webp)
Arxiv:2101.02592V1 [Math.HO] 6 Jan 2021 in His Seminal Paper [10]
International Journal of Computer Discovered Mathematics (IJCDM) ISSN 2367-7775 ©IJCDM Volume 5, 2020, pp. 13{41 Received 6 August 2020. Published on-line 30 September 2020 web: http://www.journal-1.eu/ ©The Author(s) This article is published with open access1. Arrangement of Central Points on the Faces of a Tetrahedron Stanley Rabinowitz 545 Elm St Unit 1, Milford, New Hampshire 03055, USA e-mail: [email protected] web: http://www.StanleyRabinowitz.com/ Abstract. We systematically investigate properties of various triangle centers (such as orthocenter or incenter) located on the four faces of a tetrahedron. For each of six types of tetrahedra, we examine over 100 centers located on the four faces of the tetrahedron. Using a computer, we determine when any of 16 con- ditions occur (such as the four centers being coplanar). A typical result is: The lines from each vertex of a circumscriptible tetrahedron to the Gergonne points of the opposite face are concurrent. Keywords. triangle centers, tetrahedra, computer-discovered mathematics, Eu- clidean geometry. Mathematics Subject Classification (2020). 51M04, 51-08. 1. Introduction Over the centuries, many notable points have been found that are associated with an arbitrary triangle. Familiar examples include: the centroid, the circumcenter, the incenter, and the orthocenter. Of particular interest are those points that Clark Kimberling classifies as \triangle centers". He notes over 100 such points arXiv:2101.02592v1 [math.HO] 6 Jan 2021 in his seminal paper [10]. Given an arbitrary tetrahedron and a choice of triangle center (for example, the circumcenter), we may locate this triangle center in each face of the tetrahedron. -

A Condition That a Tangential Quadrilateral Is Also Achordalone
View metadata, citation and similar papers at core.ac.uk brought to you by CORE Mathematical Communications 12(2007), 33-52 33 A condition that a tangential quadrilateral is also achordalone Mirko Radic´,∗ Zoran Kaliman† and Vladimir Kadum‡ Abstract. In this article we present a condition that a tangential quadrilateral is also a chordal one. The main result is given by Theo- rem 1 and Theorem 2. Key words: tangential quadrilateral, bicentric quadrilateral AMS subject classifications: 51E12 Received September 1, 2005 Accepted March 9, 2007 1. Introduction A polygon which is both tangential and chordal will be called a bicentric polygon. The following notation will be used. If A1A2A3A4 is a considered bicentric quadrilateral, then its incircle is denoted by C1, circumcircle by C2,radiusofC1 by r,radiusofC2 by R, center of C1 by I, center of C2 by O, distance between I and O by d. A2 C2 C1 r A d 1 O I R A3 A4 Figure 1.1 ∗Faculty of Philosophy, University of Rijeka, Omladinska 14, HR-51 000 Rijeka, Croatia, e-mail: [email protected] †Faculty of Philosophy, University of Rijeka, Omladinska 14, HR-51 000 Rijeka, Croatia, e-mail: [email protected] ‡University “Juraj Dobrila” of Pula, Preradovi´ceva 1, HR-52 100 Pula, Croatia, e-mail: [email protected] 34 M. Radic,´ Z. Kaliman and V. Kadum The first one who was concerned with bicentric quadrilaterals was a German mathematicianNicolaus Fuss (1755-1826), see [2]. He foundthat C1 is the incircle and C2 the circumcircle of a bicentric quadrilateral A1A2A3A4 iff (R2 − d2)2 =2r2(R2 + d2). -
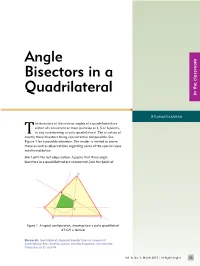
Angle Bisectors in a Quadrilateral Are Concurrent
Angle Bisectors in a Quadrilateral in the classroom A Ramachandran he bisectors of the interior angles of a quadrilateral are either all concurrent or meet pairwise at 4, 5 or 6 points, in any case forming a cyclic quadrilateral. The situation of exactly three bisectors being concurrent is not possible. See Figure 1 for a possible situation. The reader is invited to prove these as well as observations regarding some of the special cases mentioned below. Start with the last observation. Assume that three angle bisectors in a quadrilateral are concurrent. Join the point of T D E H A F G B C Figure 1. A typical configuration, showing how a cyclic quadrilateral is formed Keywords: Quadrilateral, diagonal, angular bisector, tangential quadrilateral, kite, rhombus, square, isosceles trapezium, non-isosceles trapezium, cyclic, incircle 33 At Right Angles | Vol. 4, No. 1, March 2015 Vol. 4, No. 1, March 2015 | At Right Angles 33 D A D A D D E G A A F H G I H F F G E H B C E Figure 3. If is a parallelogram, then is a B C B C rectangle B C Figure 2. A tangential quadrilateral Figure 6. The case when is a non-isosceles trapezium: the result is that is a cyclic Figure 7. The case when has but A D quadrilateral in which : the result is that is an isosceles ∘ trapezium ( and ∠ ) E ∠ ∠ ∠ ∠ concurrence to the fourth vertex. Prove that this line indeed bisects the angle at the fourth vertex. F H Tangential quadrilateral A quadrilateral in which all the four angle bisectors G meet at a pointincircle is a — one which has an circle touching all the four sides. -

Lemmas in Euclidean Geometry1 Yufei Zhao [email protected]
IMO Training 2007 Lemmas in Euclidean Geometry Yufei Zhao Lemmas in Euclidean Geometry1 Yufei Zhao [email protected] 1. Construction of the symmedian. Let ABC be a triangle and Γ its circumcircle. Let the tangent to Γ at B and C meet at D. Then AD coincides with a symmedian of △ABC. (The symmedian is the reflection of the median across the angle bisector, all through the same vertex.) A A A O B C M B B F C E M' C P D D Q D We give three proofs. The first proof is a straightforward computation using Sine Law. The second proof uses similar triangles. The third proof uses projective geometry. First proof. Let the reflection of AD across the angle bisector of ∠BAC meet BC at M ′. Then ′ ′ sin ∠BAM ′ ′ BM AM sin ∠ABC sin ∠BAM sin ∠ABD sin ∠CAD sin ∠ABD CD AD ′ = ′ sin ∠CAM ′ = ∠ ∠ ′ = ∠ ∠ = = 1 M C AM sin ∠ACB sin ACD sin CAM sin ACD sin BAD AD BD Therefore, AM ′ is the median, and thus AD is the symmedian. Second proof. Let O be the circumcenter of ABC and let ω be the circle centered at D with radius DB. Let lines AB and AC meet ω at P and Q, respectively. Since ∠PBQ = ∠BQC + ∠BAC = 1 ∠ ∠ ◦ 2 ( BDC + DOC) = 90 , we see that PQ is a diameter of ω and hence passes through D. Since ∠ABC = ∠AQP and ∠ACB = ∠AP Q, we see that triangles ABC and AQP are similar. If M is the midpoint of BC, noting that D is the midpoint of QP , the similarity implies that ∠BAM = ∠QAD, from which the result follows. -

Bicentric Quadrilateral Central Configurations 1
BICENTRIC QUADRILATERAL CENTRAL CONFIGURATIONS JAUME LLIBRE1 AND PENGFEI YUAN2 Abstract. A bicentric quadrilateral is a tangential cyclic quadri- lateral. In a tangential quadrilateral the four sides are tangents to an inscribed circle, and in a cyclic quadrilateral the four vertices lie on a circumscribed circle. In this paper we classify all planar cen- tral configurations of the 4-body problem, where the four bodies are at the vertices of a bicentric quadrilateral. 1. Introduction and statement of the results The well-known Newtonian n-body problem concerns with the mo- tion of n mass points with positive mass mi moving under their mutual attraction in Rd in accordance with Newton’s law of gravitation. The equations of the motion of the n-body problem are : n mj(xi xj) x¨i = − , 1 i n, − X r3 ≤ ≤ j=1,j=i ij 6 where we have taken the unit of time in such a way that the Newtonian d gravitational constant be one, and xi R (i = 1,...,n) denotes the ∈ position vector of the i-body, rij = xi xj is the Euclidean distance between the i-body and the j-body.| − | Alternatively the equations of the motion can be written mix¨i = iU(x), 1 i n, ∇ ≤ ≤ where x =(x1,...,xn), and m m U(x)= i j , X x x 1 i<j n i j ≤ ≤ | − | is the potential of the system. 2010 Mathematics Subject Classification. 70F07,70F15. Key words and phrases. Convex central configuration, four-body problem, bi- centric quadrilateral. 1 cat http://www.gsd.uab. 2 J.LLIBREANDP.YUAN The solutions of the 2-body problem (also called the Kepler problem) has been completely solved.